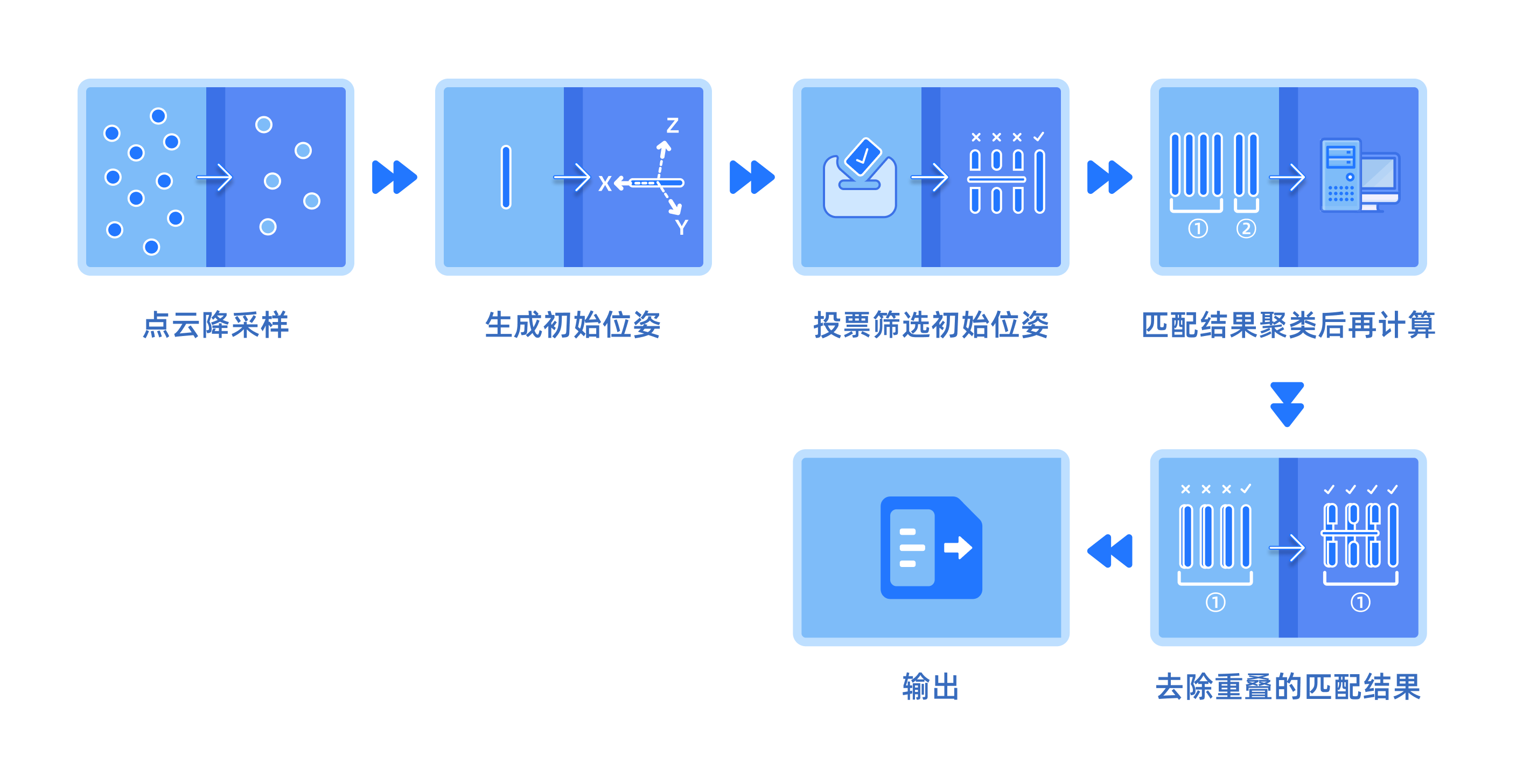
3D粗匹配
参数说明
参数设置
模型点云文件
参数说明 |
该参数可通过映射参数选择匹配模型库中的点云模板或直接上传工件模板点云文件,上传后的点云文件也可下载 |
模型切换方式 |
单击 上传文件 弹出窗口,选择点云文件直接上传,或者通过映射参数切换。 |
距离离散数量
默认值 |
20 |
参数范围 |
2-500 |
参数说明 |
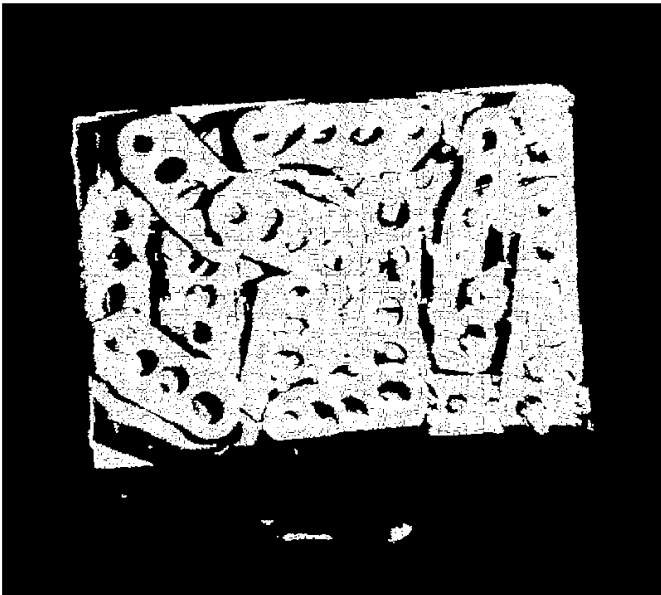
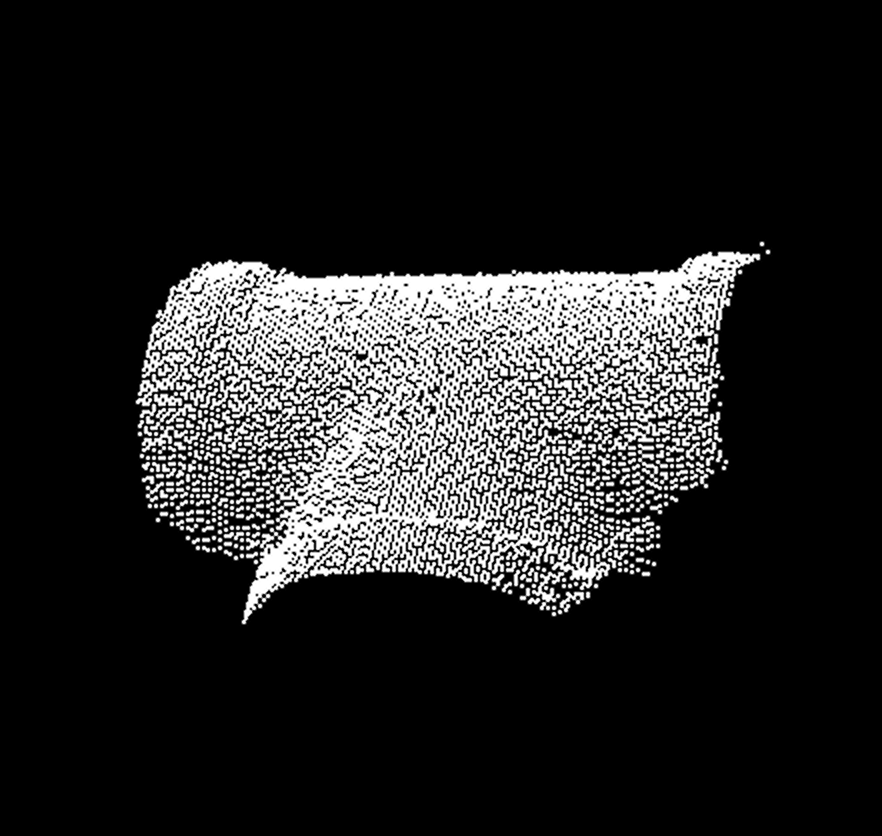
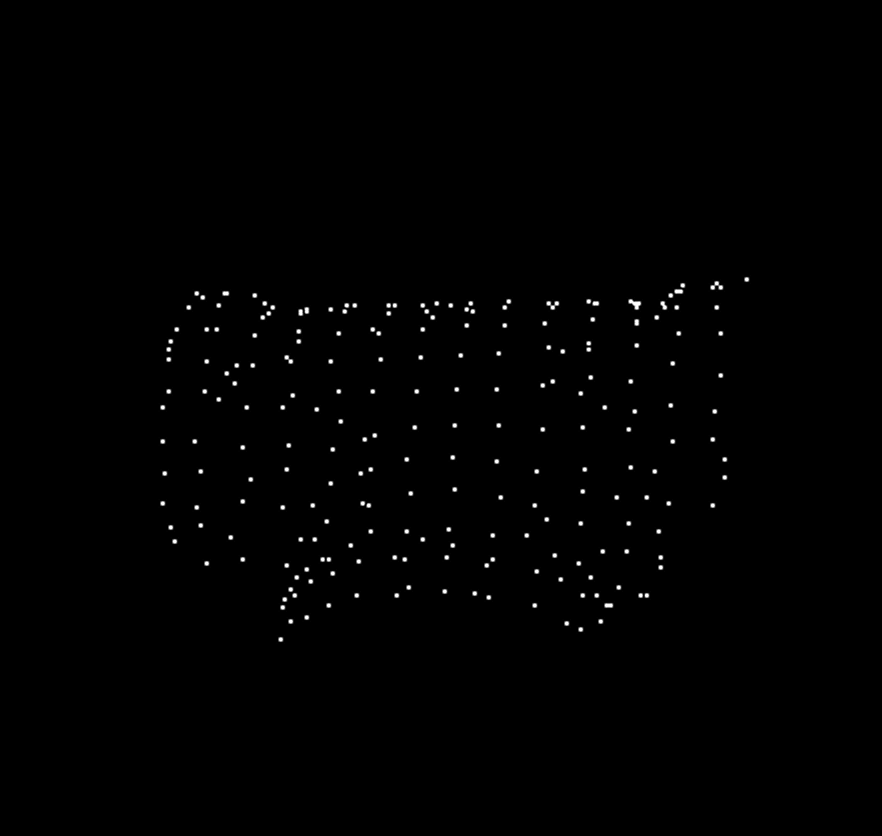
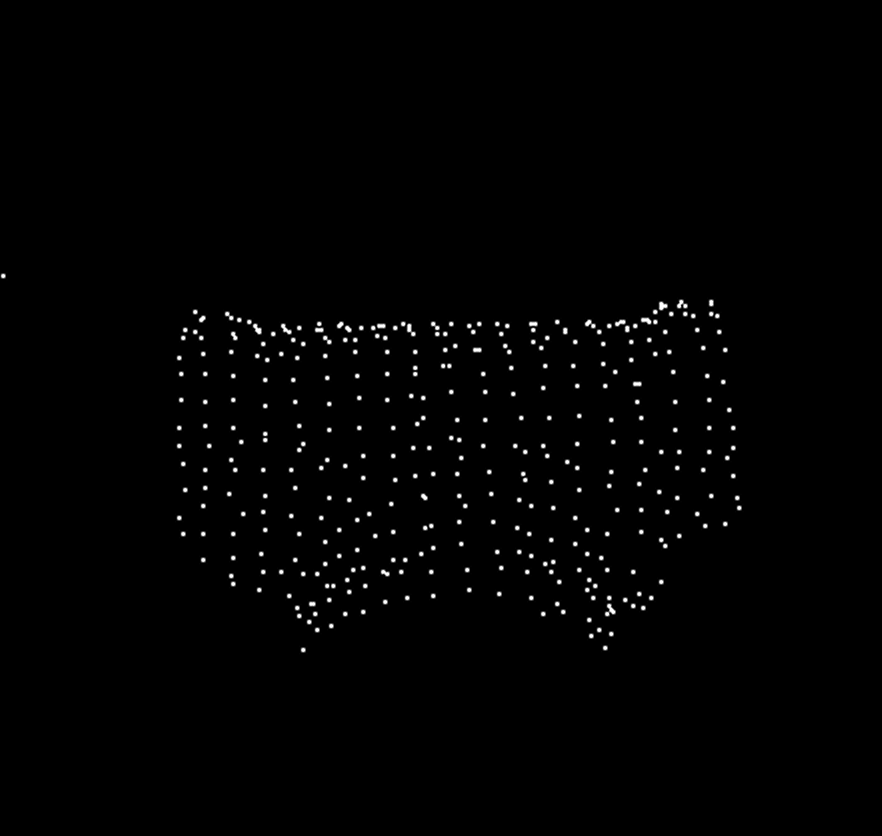
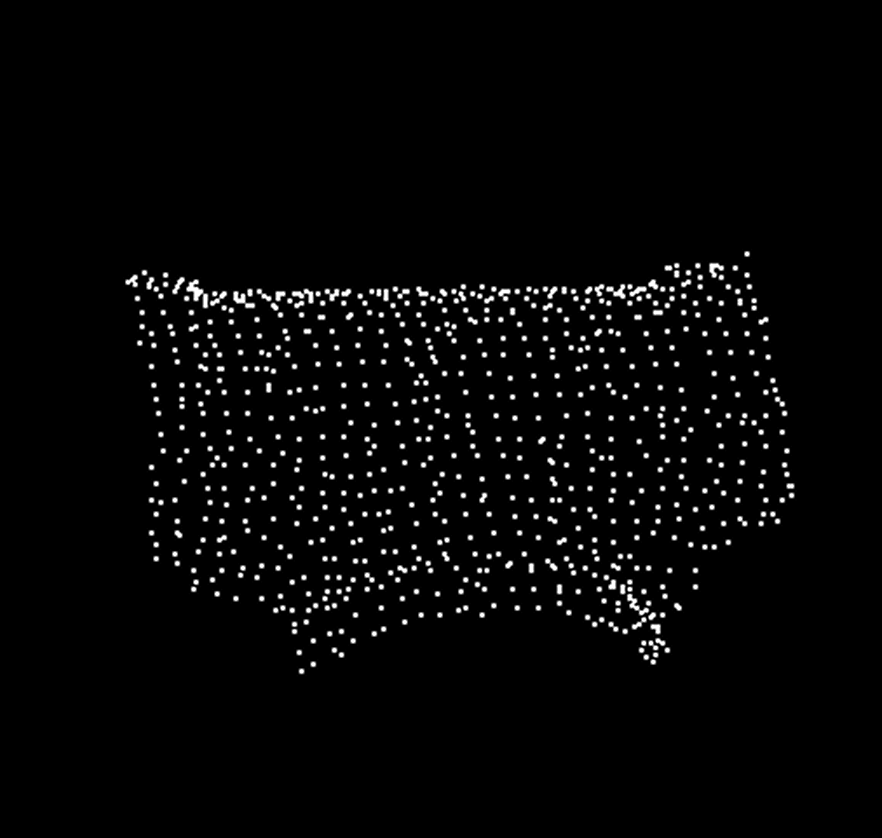
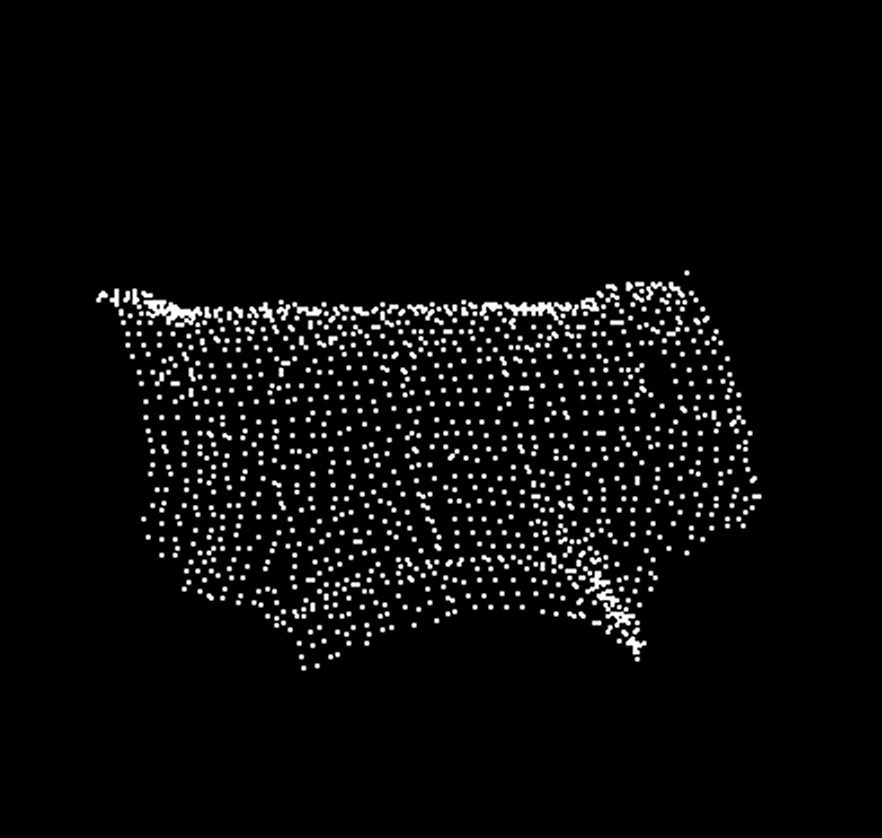
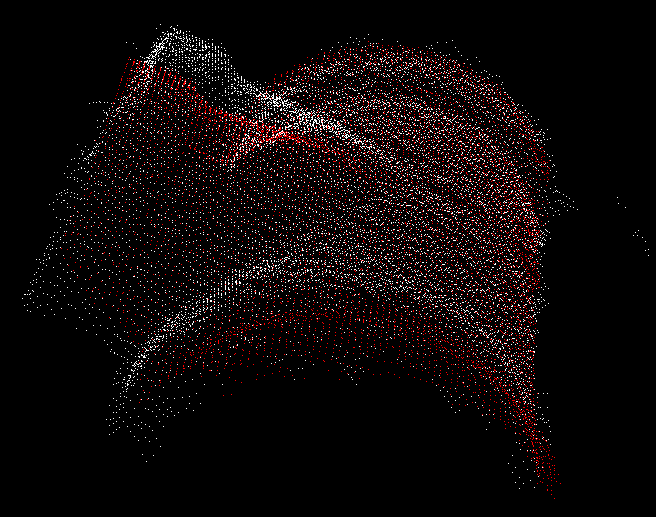
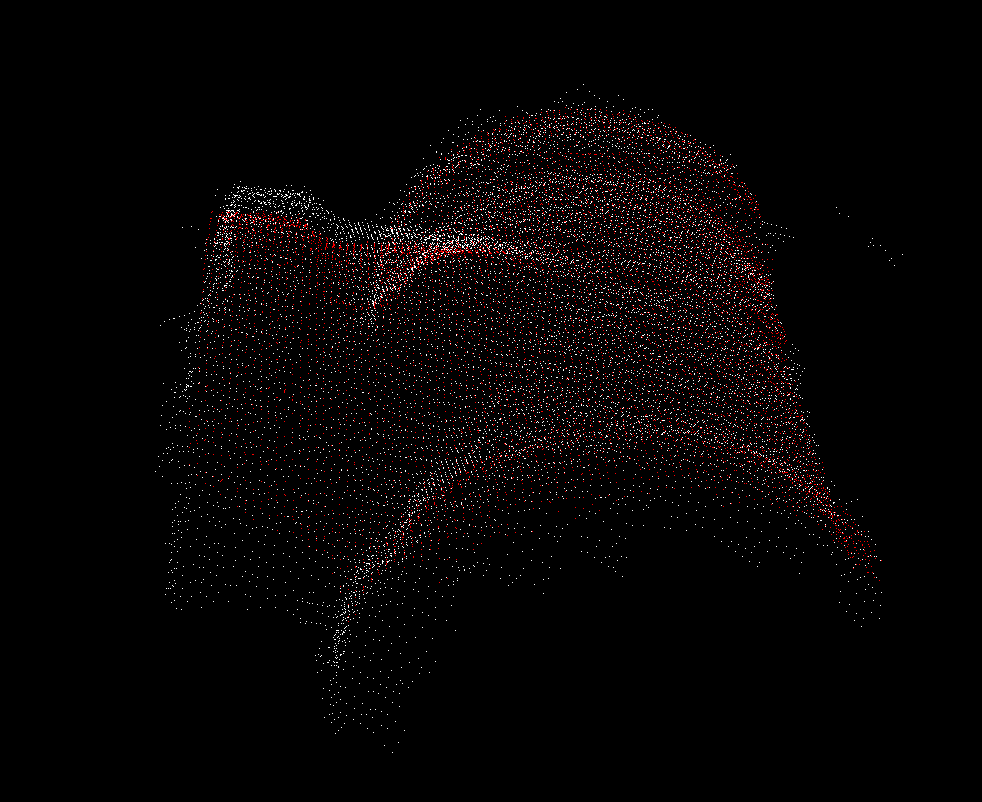
该参数用于处理参与匹配计算的点云数量,对匹配模板和场景点云进行降采样处理(距离间隔=模板尺寸/距离离散数量),距离离散数量值越大,参与匹配计算的点云数量越多,反之越少 |
调参说明 |
若默认值计算的匹配结果位置偏差比较大,可适当调大该参数,参与匹配计算点增加能够提升匹配精度,注意调大参数后,计算时间也会增加;若默认值计算时间较长,且匹配结果位置偏差较小,可适当调小该参数,提升节拍 |
效果 |
|
|
|
|
|
推荐值 |
原始点云 |
15 |
20 |
30 |
40 |
角度离散数量
默认值 |
30 |
参数范围 |
1-500 |
参数说明 |
该参数用于量化初始位姿的角度值,即将连续的角度值离散为一段段间隔的角度值(角度间隔=360/角度离散数量);该值越大,初始角度精度越高,反之越低 |
调参说明 |
一般不调整该参数,若匹配的结果角度偏差比较大,可适当调大该参数; |
效果 |
|
|
推荐值 |
20 |
30 |
高级参数
聚类角度阈值
默认值 |
24 |
参数范围 |
0-360 |
推荐值 |
15、20、24、30 |
参数说明 |
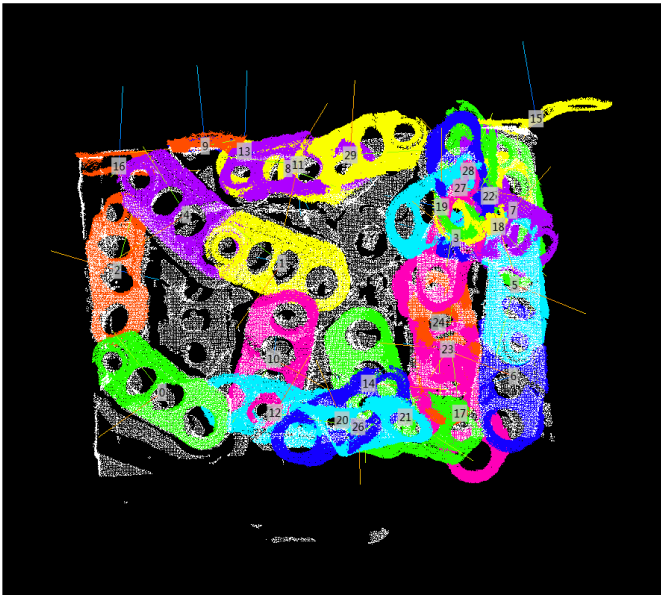
该参数是用于判断已经通过投票的初始位姿是否属于同一个工件,初始位姿角度差异值小于参数值,认为属于同一个工件,最终显示的匹配结果为差异值在参数范围内的位姿均值 |
调参说明 |
一般不调整该参数,若显示的匹配结果较少且角度偏差比较大,可适当调小该参数值,缩小位姿角度聚类时的计算范围,输出更多的结果,提升匹配精度,但计算时间也会增加 |
聚类距离阈值
默认值 |
6 |
参数范围 |
0-200 |
推荐值 |
3、6、10 |
参数说明 |
该参数是用于判断已经通过投票的初始位姿是否属于同一个工件,初始位姿距离差异值小于参数值,认为属于同一个工件,最终显示的匹配结果为差异值在参数范围内的初始位姿的均值 |
调参说明 |
一般不调整该参数,若显示的匹配结果较少且位置偏差比较大,可适当调小该参数值,缩小位姿位置聚类时的计算范围,输出更多的结果,提升匹配精度,但计算时间也会增加 |
投票过滤阈值
默认值 |
0.5 |
参数范围 |
0-1 |
推荐值 |
0.1、0.3、0.5、0.8、1.0 |
参数说明 |
该参数用于筛选初始位姿,生成的初始位姿进行一轮匹配计算,大于该值的初始位姿被保留;该值越高,过滤的错误结果越多,匹配结果越准确 |
调参说明 |
一般不调整该参数,若显示的匹配数量比较少,可适当调小该值;若显示的匹配数量与偏差比较大的结果较多,可适当调大该值 |