🔷计算点云包围框
功能描述
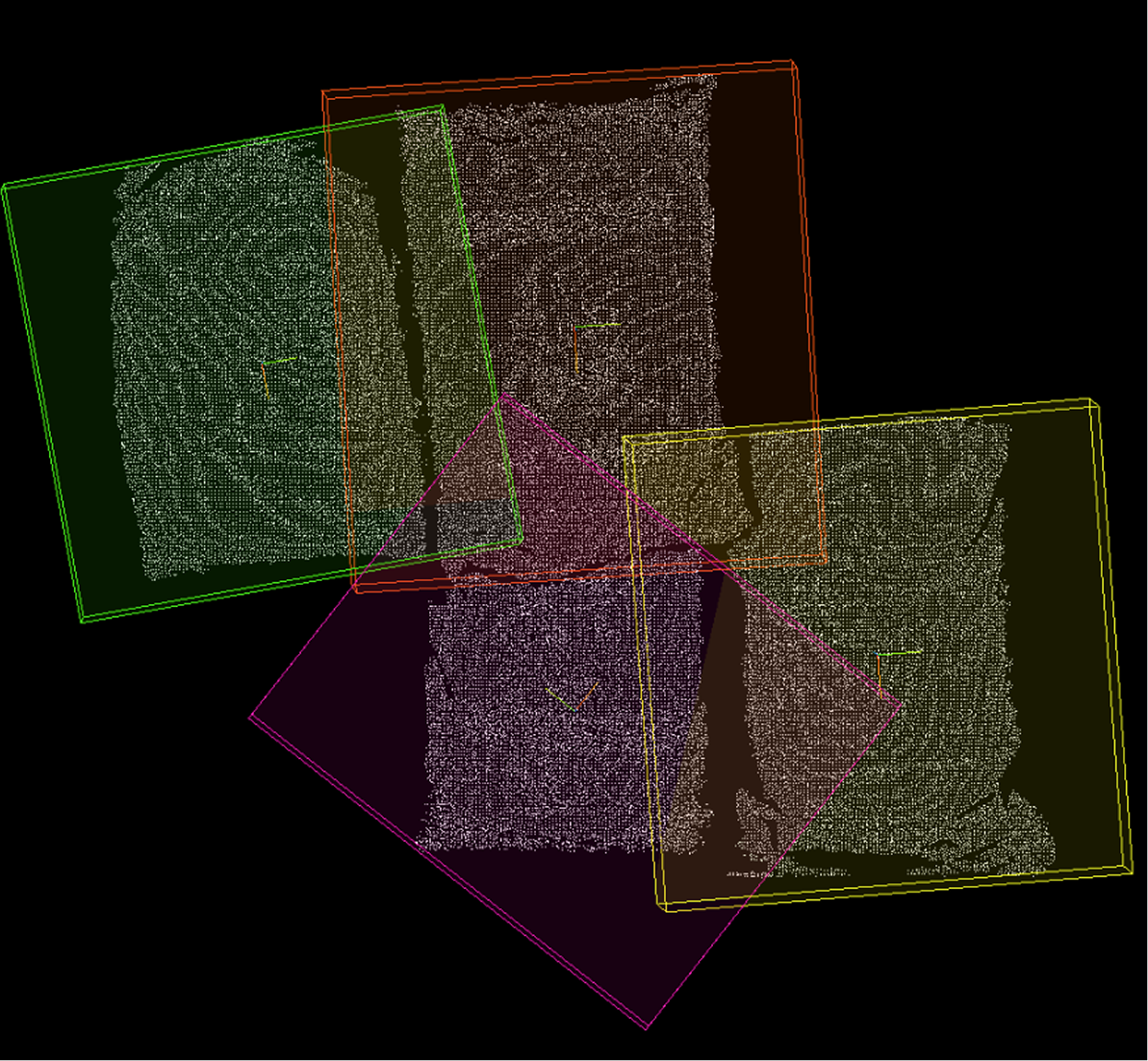
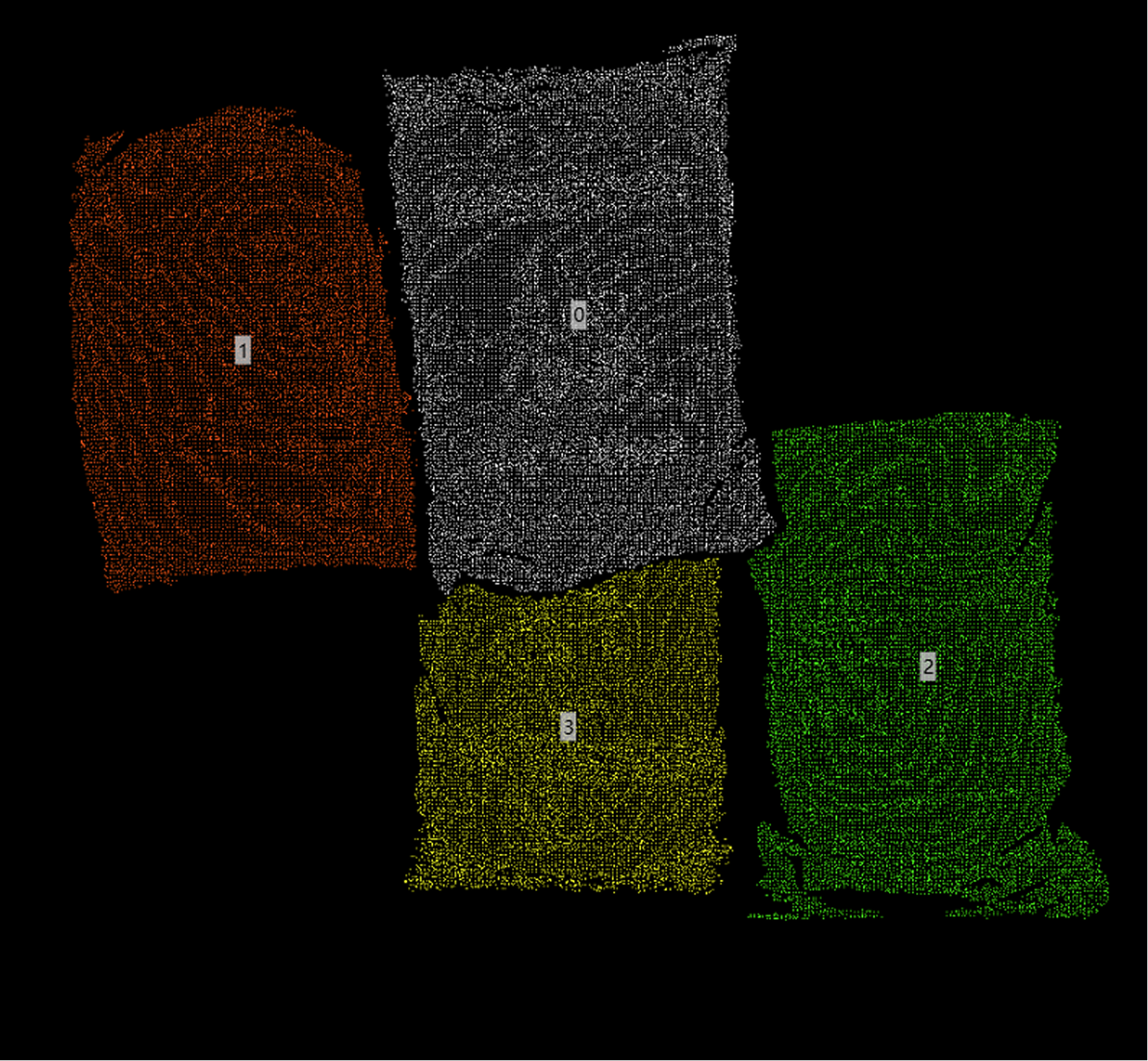
该算子为输入的每个点云计算三维包围框,输出包围框的几何信息。
可选两种类型的包围框:
-
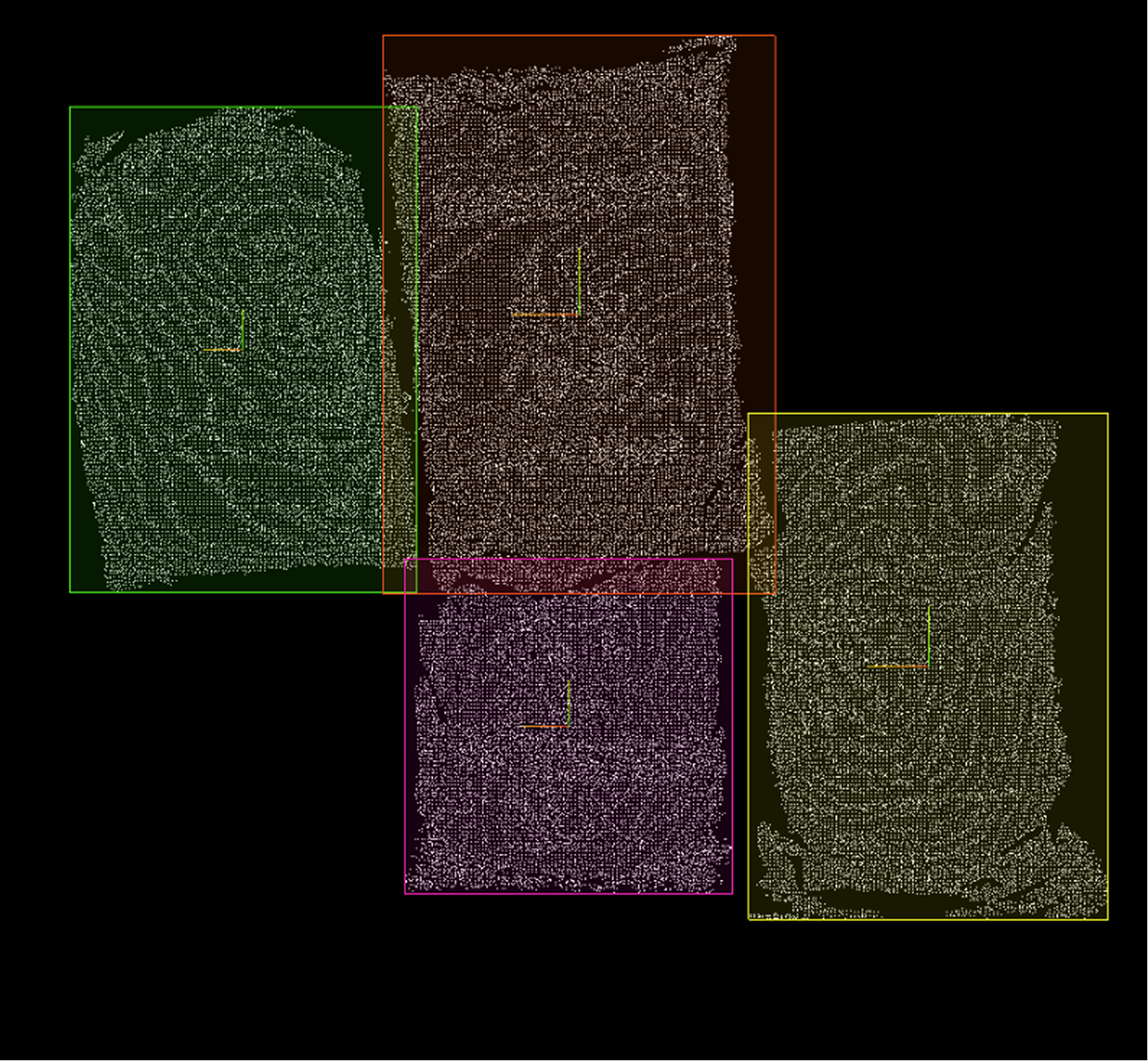
坐标对齐包围框(AABB): 包围框的各个面平行于坐标系的 X、Y、Z 轴。计算简单快速,适用于物体朝向与坐标轴大致对齐的情况。
-
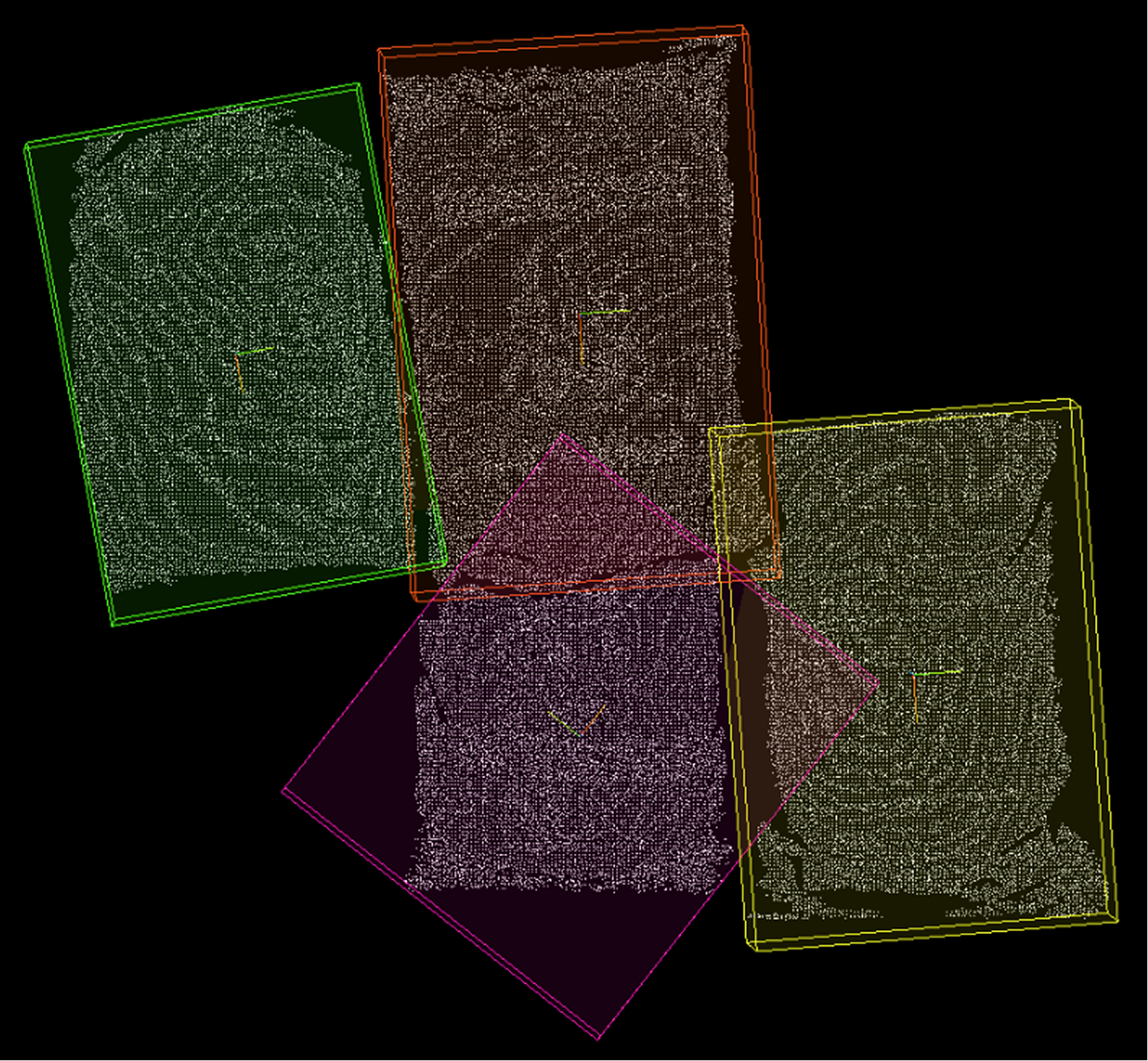
带方向最小包围盒(OBB): 包围框的方向由点云自身的主方向决定,能够更紧密地包围任意朝向的物体。
使用场景
-
物体尺寸与位置估计 : 获取点云所代表物体的三维尺寸和中心位置。
-
粗略位姿估计 : OBB可以提供物体的朝向信息。
-
空间占用分析 : 确定物体在空间中占据的大致范围。
-
ROI生成 : 快速生成包围点云的区域,用于后续更精细的处理。
-
碰撞检测 : 使用简单的AABB或更紧密的OBB进行初步的碰撞判断。
输入输出
输入项 |
点云:输入的点云或点云列表。如果是列表,会对列表中的每个点云独立计算包围框。算子内部会先尝试移除点云中的 NaN 值再进行计算。 |
|
输出项 |
包围框法向:计算得到的包围框的一个法向量列表。 包围框中心点:计算得到的每个包围框的中心点列表,计算方法由参数中心点类型决定。 包围框:每个包围框的详细信息列表。 包围框大小:每个包围框沿其主轴的X, Y, Z尺寸列表。 3维ROI:根据计算出的包围框生成的、可能经过缩放调整的三维ROI列表。 |
|
参数说明
|
该算子有两个版本:
两者核功能和参数完全相同,仅处理的点云数据类型不同。 |
计算方法
参数说明 |
选择计算包围框的类型。 |
|
调参说明 |
OBB带方向最小包围盒 (OBB, 默认) :计算能够紧密包围点云的、带有方向的最小体积包围盒。适用于任意朝向的物体,能提供更精确的尺寸和方向信息,但计算稍复杂。 |
|
AABB坐标对齐包围盒 (AABB): 计算各面平行于坐标轴的、包围点云的最小包围盒。计算简单快速,但对于倾斜的物体,其尺寸会比实际物体大。 |
|
|
根据应用需求选择。如果需要物体的精确尺寸和方向,选OBB;如果只需要大致范围且物体朝向规整,或需要更快的速度,可选AABB。 |
||
中心点类型
参数说明 |
选择输出的“包围框中心点”是以何种方式计算得到的。 |
调参说明 |
|
法向 Z 方向
参数说明 |
指定输出的“包围框法向”的Z分量应该是正值还是负值,算子会根据此设置调整计算出的法向量方向。 |
调参说明 |
用于统一输出法向量的朝向。如果希望法向量总是指向Z轴正方向(“朝上”),选择“正Z”;如果希望指向Z轴负方向(“朝下”),选择“负Z”。 |
缩放方法
参数说明 |
选择如何调整(缩放/外扩)最终输出的3D ROI区域。 |
调参说明 |
|