🔷矩形平面点云包围框
功能描述
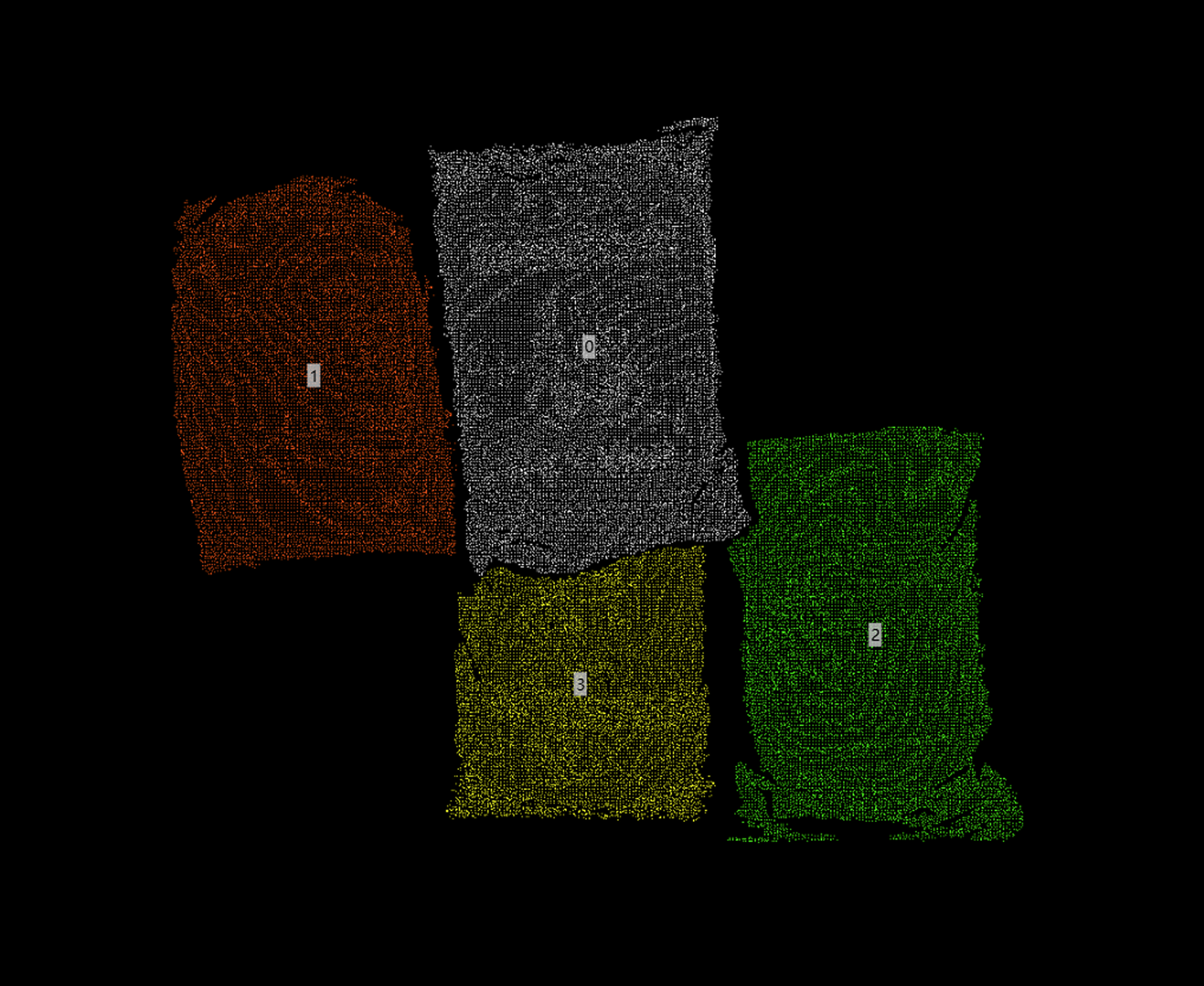
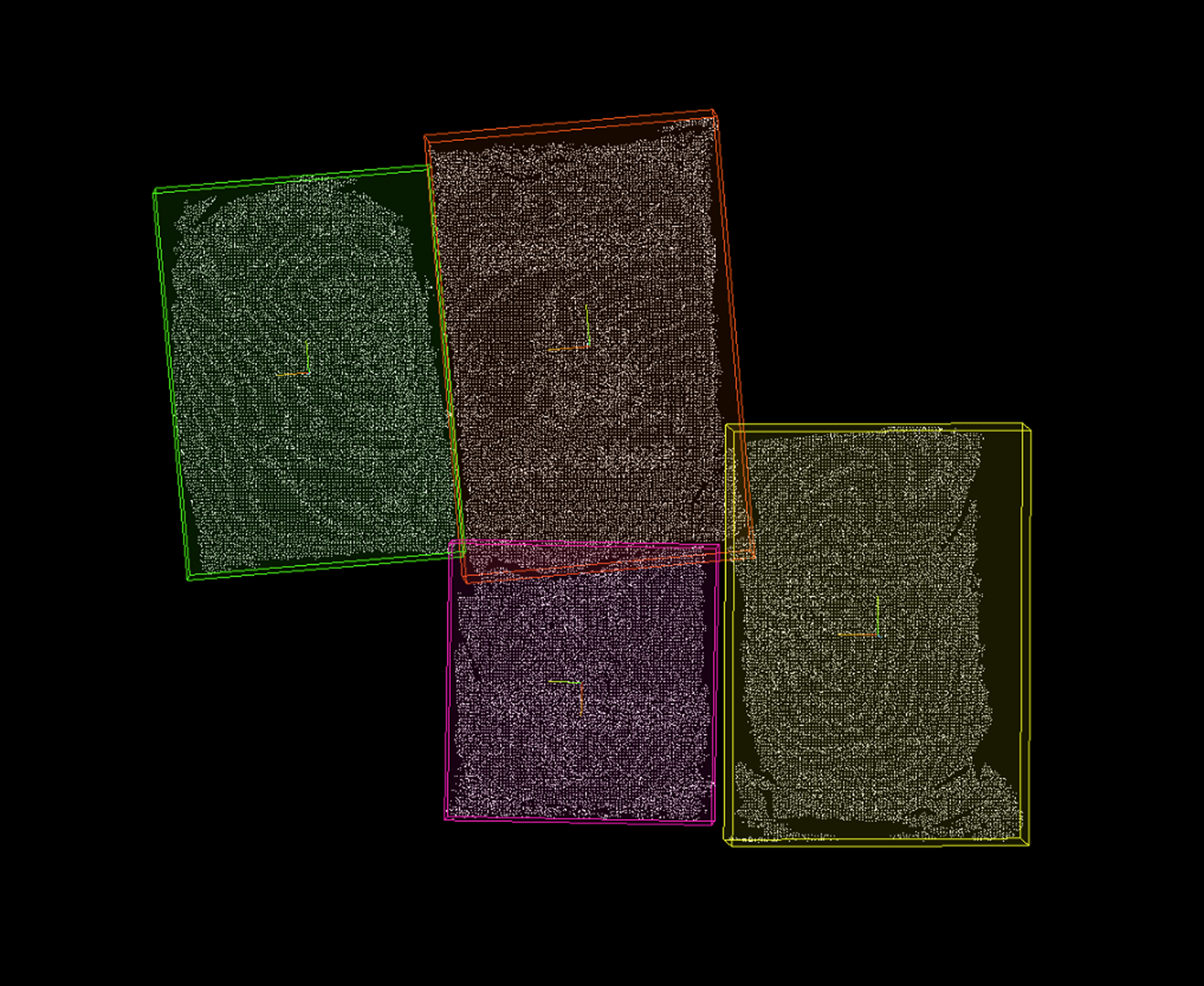
该算子为输入的每个点云计算一个有向最小包围盒(有向最小包围盒是一个可以任意旋转的长方体,它以最小的体积紧密地包围一个物体,包围盒的边不一定平行于坐标轴),输出这个有向最小包围盒的参数,包括中心点、尺寸、变换矩阵、法向量以及一个可调整的ROI。
使用场景
-
精确位姿估计 : 获取物体的精确尺寸、中心和朝向,特别是对于那些在平面上任意旋转放置的矩形或近似矩形的物体。
-
抓取规划 : 为机器人抓取提供精确的包围框信息,包括物体的长、宽、高和方向。
-
尺寸测量 : 测量物体的三维尺寸。
-
ROI生成 : 生成紧密贴合物体的、带有方向的ROI,用于后续的精细处理或分析。
输入输出
输入项 |
点云:输入的点云或点云列表,主要是针对平面点云的。 平面法向:一个列表,包含与输入点云列表一一对应的平面法向量 [nx, ny, nz]。这个法向量定义了寻找最小面积包围框时所参考的平面方向。 |
|
输出项 |
包围框法向:计算得到的最小包围框所在平面的法向量列表 (Nx3)。 包围框中心点:计算得到的每个包围框的中心点列表 (Nx3),计算方法由参数中心点类型决定。 包围框:每个包围框的详细信息列表,包含中心、尺寸和3x3旋转变换矩阵。 包围框大小:每个包围框的X, Y, Z尺寸列表 (Nx3)。 3维ROI:根据计算出的包围框生成的、可能经过缩放调整的三维ROI列表。 |
|
参数说明
|
该算子有两个版本:
两者核心功能和参数完全相同,仅处理的点云数据类型不同。 |
|
输入对应 : 输入的点云列表 和平面法向列表必须一一对应,且法向量必须是有效的3维向量。 |
角度阵列范围
参数说明 |
在寻找最小面积包围框时,围绕输入法向量旋转点云的角度搜索范围,算子会在此范围内尝试不同的旋转角度。 |
调参说明 |
指定一个从0到该值的角度范围。例如,设置为 90 表示在 0 到 90 度之间搜索最佳旋转角度。如果物体的可能朝向范围已知且较小,可以适当减小此值以提高速度。如果物体可能任意旋转,通常需要设置为 90 或 180 度以覆盖所有可能的平面内旋转。 |
参数范围 |
[0, 180],默认值:90,单位:度 |
角度阵列步长
参数说明 |
在“角度阵列范围”内进行搜索时的角度增量。 |
调参说明 |
减小步长可以提高找到最优角度的精度,但会增加计算时间。 增大步长则相反,默认值 1.0 度通常在精度和速度之间取得了较好的平衡。 |
参数范围 |
[0, 50] ,默认值:1,单位:度 |
中心点类型
参数说明 |
选择输出的“包围框中心点”是以何种方式计算得到的。 |
调参说明 |
|
缩放方法
参数说明 |
选择如何调整(缩放/外扩)最终输出的3维 ROI 区域。 |
调参说明 |
|