🔷调整抓取物位姿
功能描述
该算子用于对输入的位姿列表进行平移和/或旋转调整,提供两种调整方法:
-
平移旋转变换 : 对列表中的每个位姿应用一次固定的平移(X, Y, Z偏移)和旋转(绕X, Y, Z轴旋转指定角度)。这个变换可以基于世界坐标系或位姿自身的局部坐标系进行。每个输入位姿产生一个调整后的输出位姿。
-
位姿镜像 : 对列表中的每个位姿,首先应用一个基础的平移偏移,然后根据用户设置的对称参数(围绕X, Y, Z轴在指定角度范围内生成多个离散角度),生成多个具有对称旋转关系的新位姿。这种方法会为每个输入位姿生成多个输出位姿,类似于“生成抓取点(参数生成)”算子的对称功能。
使用场景
-
抓取点微调 : 在计算出初始抓取位姿后,根据需要进行细微的位置调整(例如,向上抬升Z值)或姿态调整(例如,旋转Z轴角度)。
-
坐标系校准 : 对位姿进行手动的坐标系补偿平移或旋转。
-
生成对称抓取点 : 对于具有对称性的物体或抓取策略,通过“位姿镜像”方法快速生成多个等效或对称的抓取位姿。
-
测试不同姿态 : 从一个基础位姿生成一系列不同旋转角度的位姿,用于测试或规划。
输入输出
输入项 |
抓取物姿态信息: 输入的位姿列表。 绘制场景: 场景点云,主要用于在可视化界面中叠加显示调整后的位姿,不直接参与计算。 |
|
输出项 |
抓取物姿态信息: 经过调整或镜像生成后的位姿列表。如果使用“平移旋转变换”,输出列表长度与输入相同;如果使用“位姿镜像”,输出列表长度通常会是输入的倍数。 |
|
参数说明
|
坐标系
参数说明 |
选择后续的平移和旋转操作是基于哪个坐标系进行的。 |
调参说明 |
注意 :如果平移和旋转需要基于不同的坐标系,可以串联两个此节点。 |
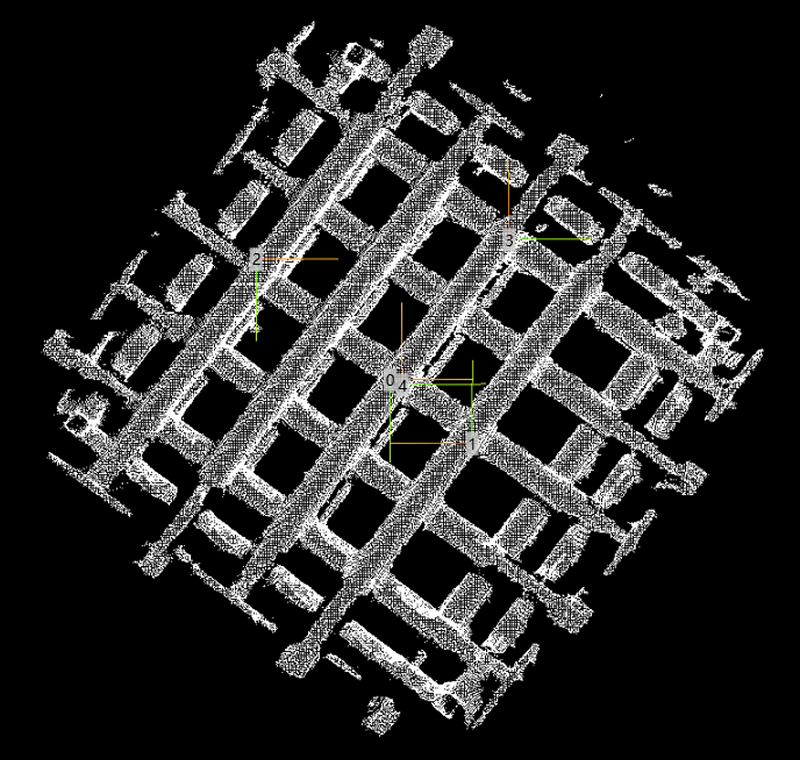
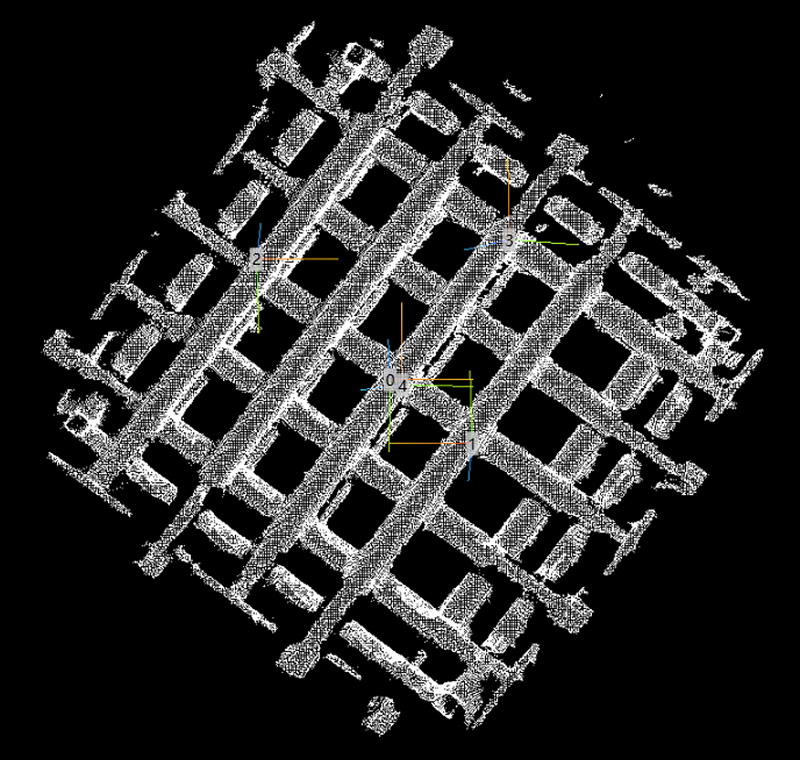
叠加X/Y/Z轴平移
参数说明 |
在选定的坐标系下,分别在X、Y、Z轴方向上应用的平移量。对于“平移旋转变换”方法,这是主要的平移操作;对于“位姿镜像”方法,这是在进行对称旋转之前应用的基础偏移。 |
调参说明 |
设置希望位姿移动的距离。正值表示沿轴正方向移动,负值表示沿负方向移动。 |
参数范围 |
[-10000, 10000],默认值:0,单位:mm |
|
|
|
叠加X轴平移=-100mm |
叠加X轴平移=0mm |
叠加X轴平移=100mm |
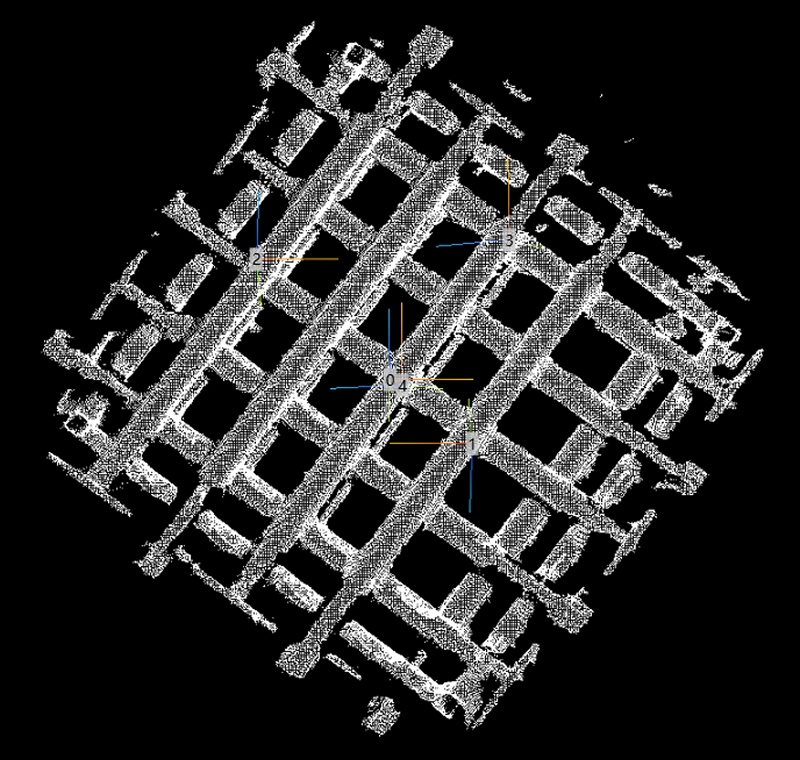
绕X/Y/Z轴旋转
参数说明 |
仅在调整方法设置为"平移旋转变换"时生效。在选定的坐标系下,分别围绕X、Y、Z轴应用的旋转角度。 |
调参说明 |
设置希望位姿额外旋转的角度,旋转顺序通常是先X后Y再Z。 |
参数范围 |
[0, 360],默认值:0,单位:度 |
|
|
|
绕X轴旋转=0度 |
绕X轴旋转=30度 |
绕X轴旋转=60度 |
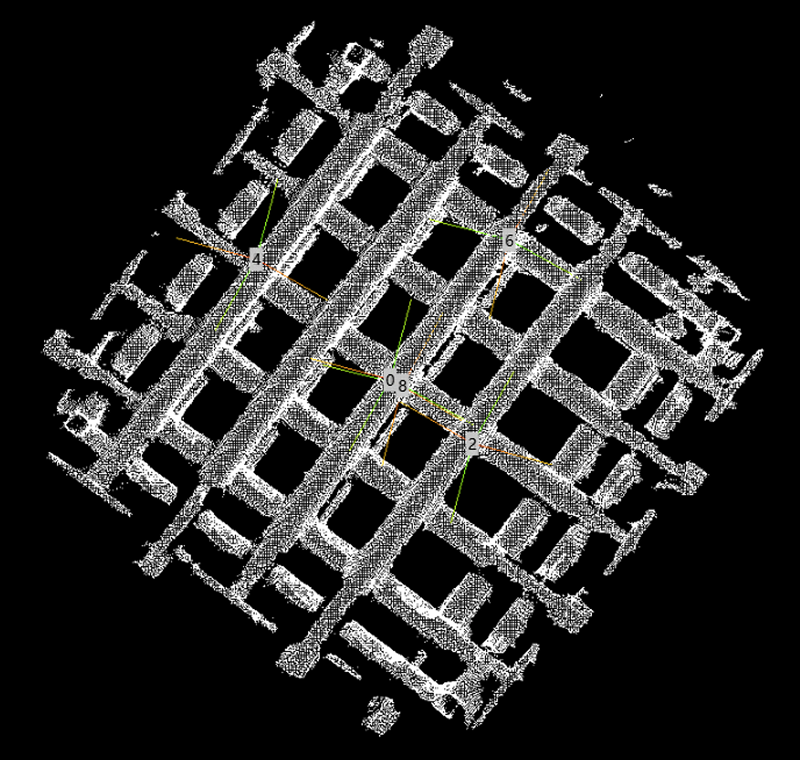
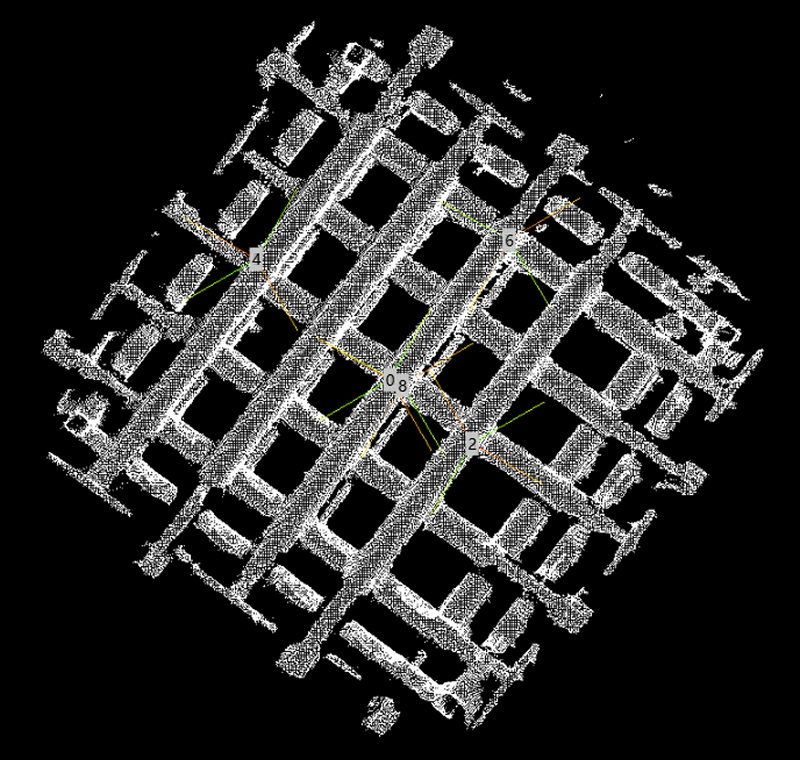
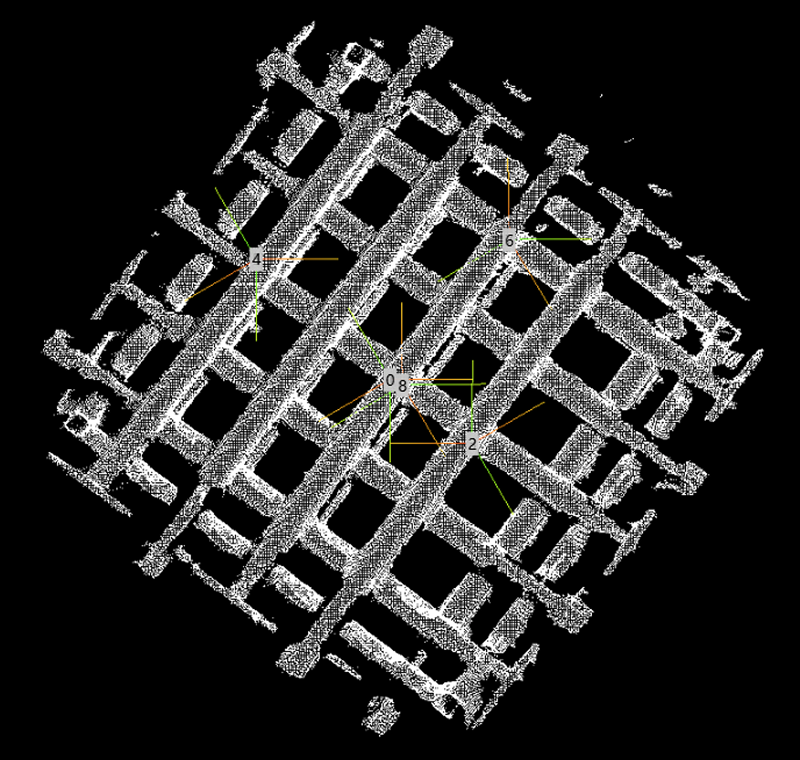
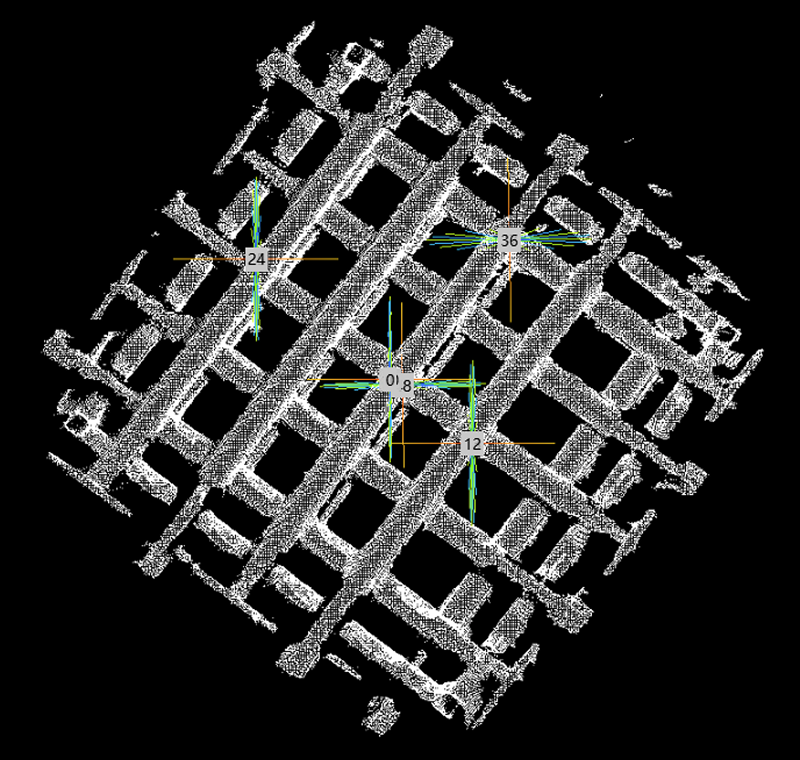
沿X/Y/Z轴对称(角度离散数目)
参数说明 |
仅在调整方法设置为"位姿镜像" 时生效。设置是否以及如何围绕位姿自身的X、Y、Z轴生成对称抓取点,数值表示在该轴的对称旋转中需要生成的离散角度的数量。 |
调参说明 |
|
参数范围 |
[0, 360],默认值:0,单位:度 |
|
|
|
沿X轴对称=0度 |
沿X轴对称=10度 |
沿X轴对称=30度 |
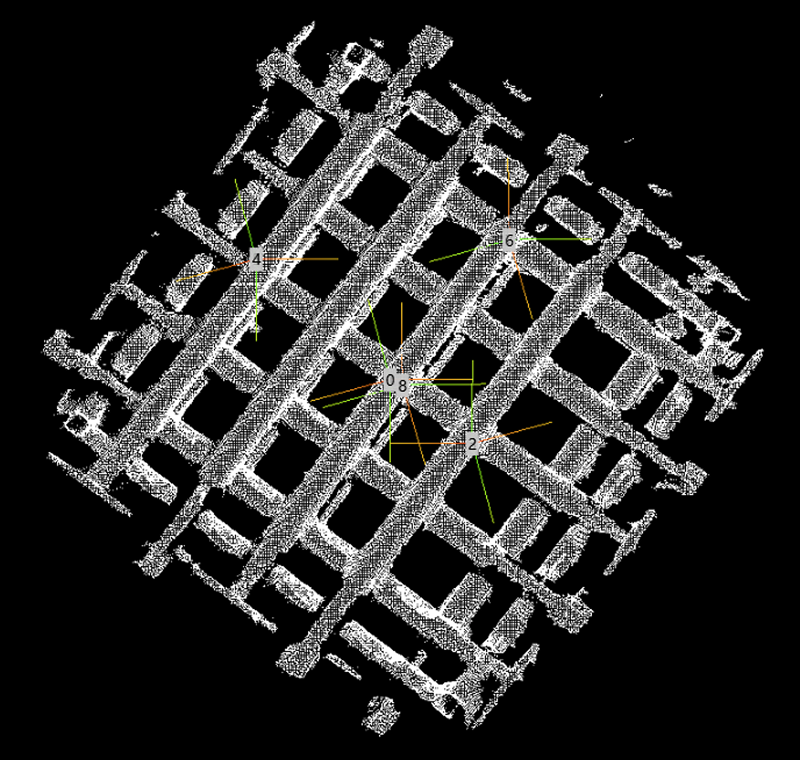
最小角度
参数说明 |
仅在调整方法设置为"位姿镜像"时生效,当启用轴对称生成时,生成的对称位姿的起始旋转角度。 |
调参说明 |
定义对称生成的角度范围的下限。 |
参数范围 |
[0, 360.1],默认值:0,单位:度 |
|
|
|
最小角度=0度 |
最小角度=30度 |
最小角度=60度 |