🔷移除垛盘点云
功能描述
该算子设计用于处理放在垛盘上的点云数据,可接收一个包含多个点云的列表,尝试识别出代表垛盘的点云,并将其与代表物体的点云分离开。算子通过分析点云的数量和空间位置(特别是高度)来判断哪个点云是垛盘,同时它会计算并输出一个围绕物体点云的ROI。
使用场景
-
机器人拆垛/码垛 : 在自动化拆垛或码垛应用中,需要将垛盘与垛盘上的货物分离开,以便单独处理货物或定位垛盘本身。
-
点云预处理 : 作为点云处理流程的一部分,去除场景中的支撑结构(如垛盘、桌面),只保留感兴趣的物体点云。
输入输出
输入项 |
聚类后点云:包含一个或多个点云的列表(通常代表物体簇和垛盘)。 |
|
输出项 |
垛盘点云:被识别为垛盘的点云(可能为None)。 |
|
移除后点云:输入列表中移除了垛盘点云后剩余的点云列表。 |
|
|
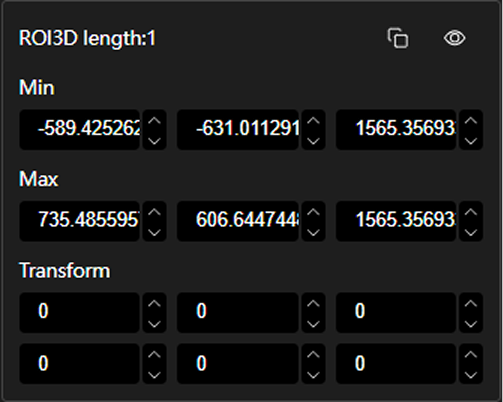
点云ROI:包含垛盘点云的ROI三维包围盒。 |
|

参数说明
|
该算子有两个版本:
两者核心功能和参数完全相同,仅处理的点云数据类型不同。 |
|
输入要求 : 算子期望输入的是一个点云列表,通常是经过聚类的结果,其中一个元素代表垛盘,其他元素代表货物簇。输入点云数量必须大于1。 |
层高
参数说明 |
用于区分垛盘和货物层的高度阈值。算子会计算点云簇中心的Z坐标,如果某个点云簇的中心Z坐标与数量最多的点云簇(通常认为是物体点云)的中心Z坐标之差大于此层高,则认为该点云簇可能属于不同的层(可能是垛盘)。 |
调参说明 |
根据实际垛盘和货物层的高度差异来设置。如果垛盘与最底层货物的高度差明显大于100mm,则默认值可能适用。如果层高较小或垛盘较薄,需要适当减小此值。如果货物层本身高度差异较大,可能需要增大此值以避免将货物层误判为垛盘。 |
参数范围 |
[1,10000],默认值:100,单位:mm |
中心计算方法
参数说明 |
选择计算每个点云簇中心点Z坐标的方法,中心点用于判断层高差异。 |
调参说明 |
|
Z轴朝向
参数说明 |
定义场景中垛盘相对于垛顶(货物最高点)的预期方向。 |
调参说明 |
|