🔷点云边缘提取
功能描述
该算子用于从输入的带法向点云中提取边缘点。通过分析点云中每个点与其邻近点的法向量方向差异来识别边缘,如果一个点与其K个最近邻近点的法向量之间的最大角度差超过了设定的“边缘角度阈值”,则该点被识别为边缘点。该算子能够自动处理有序和无序的带法向点云。
参数说明
边缘角度阈值
参数说明 |
判断一个点是否为边缘点的法向量角度差阈值。 |
调参说明 |
算子会计算每个点与其K个近邻点的法向量之间的角度差。如果这些角度差中的最大值超过了这里设定的阈值,该点就被视为边缘点。
|
参数范围 |
[0, 180],默认值:90,单位:度 |
|
|
|
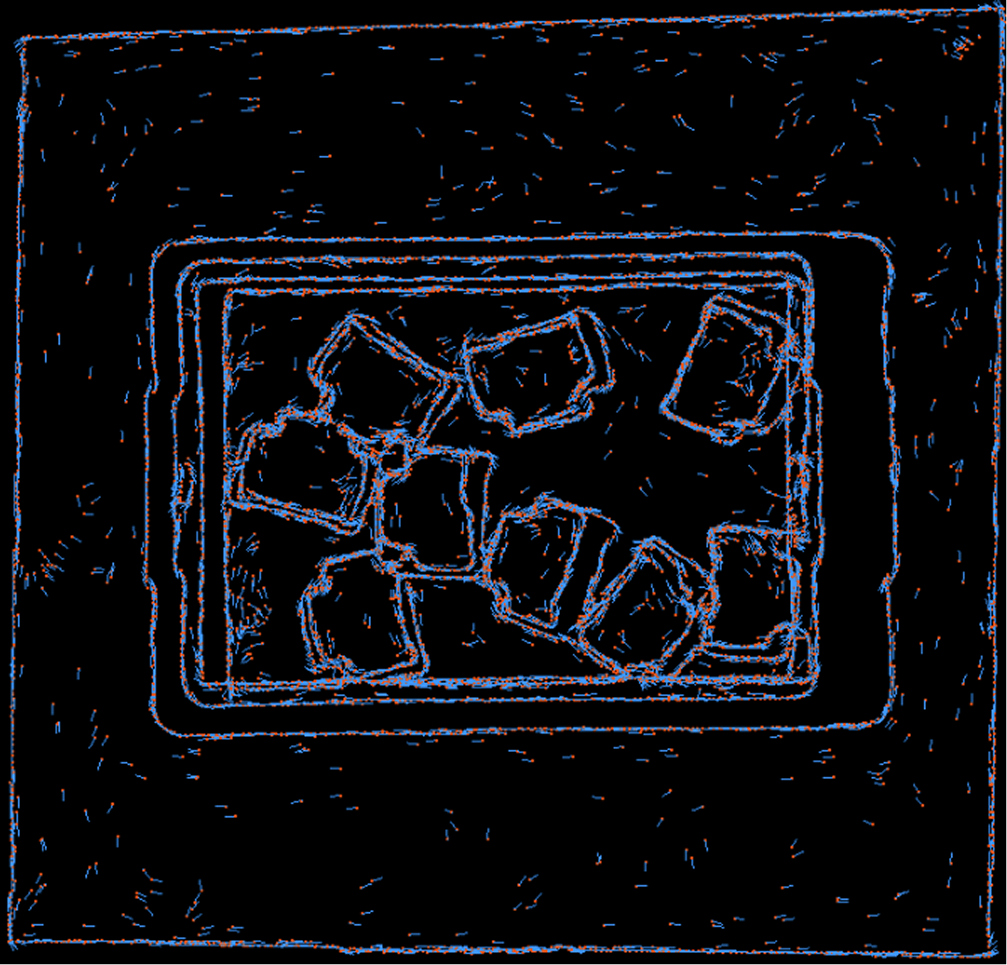
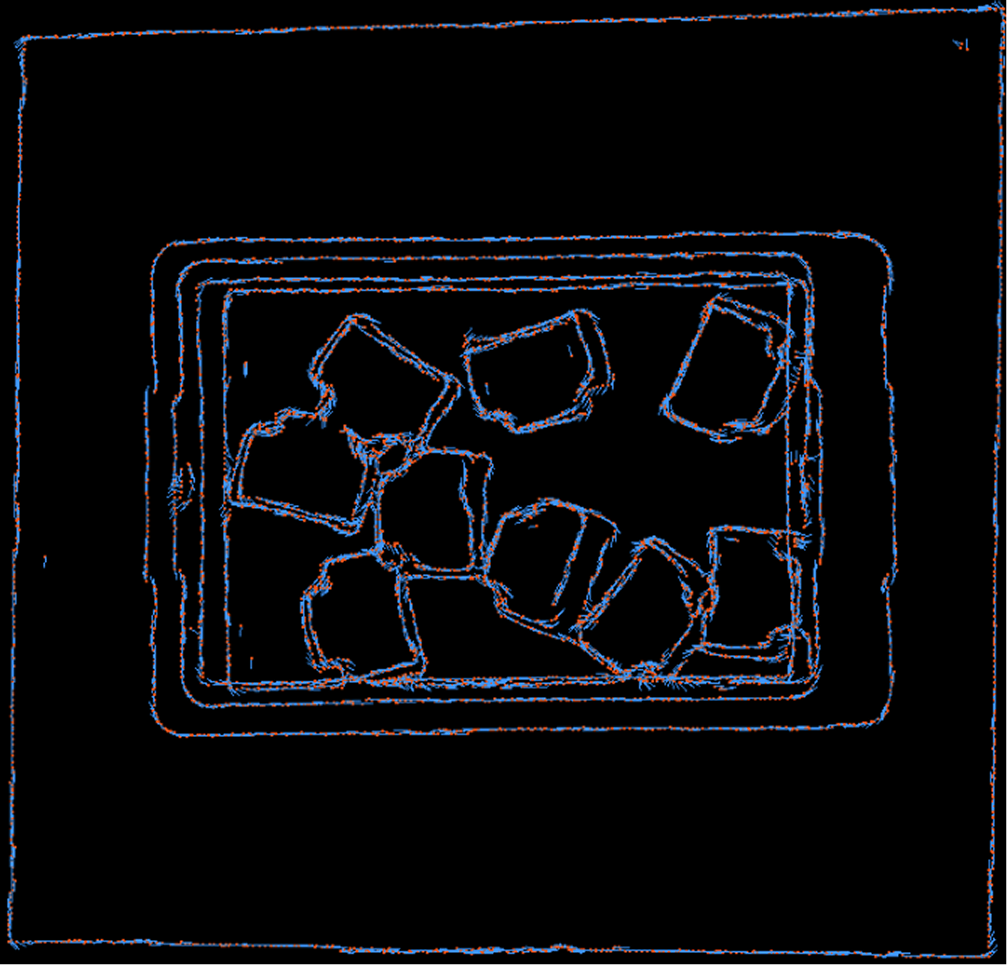
边缘角度阈值=60 |
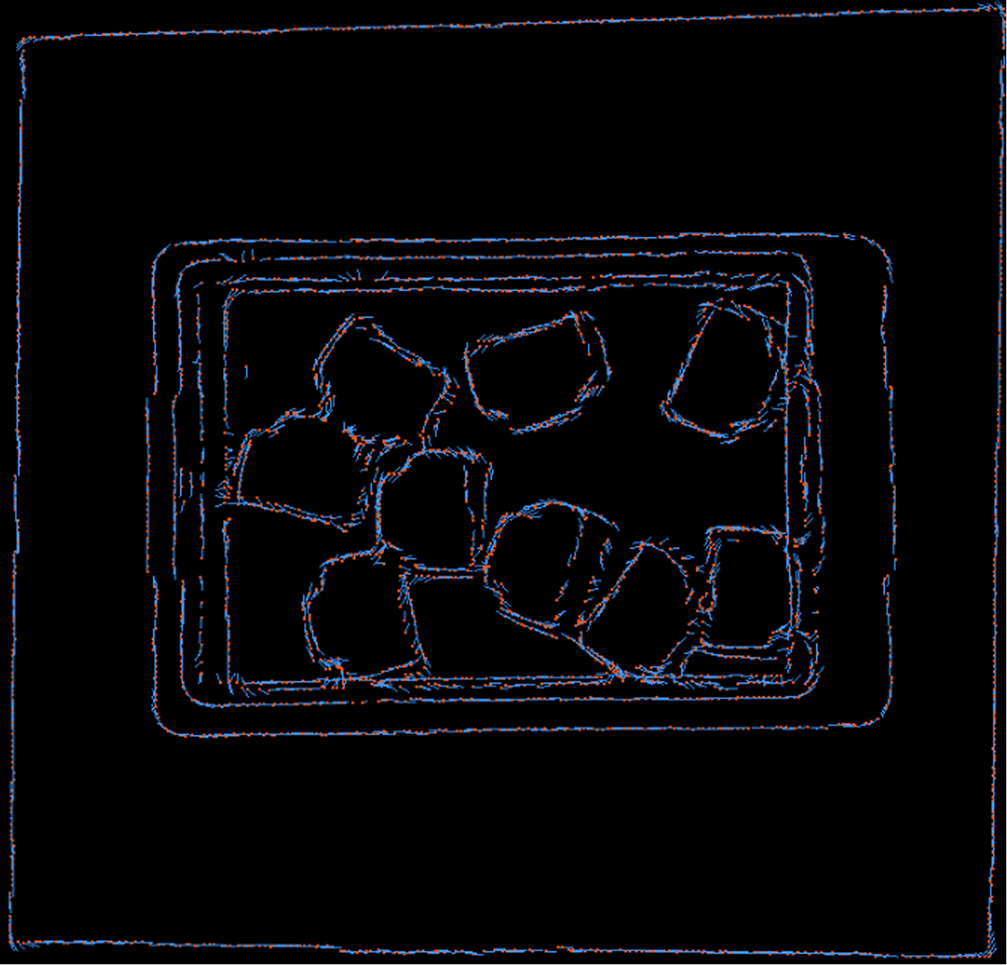
边缘角度阈值=90 |
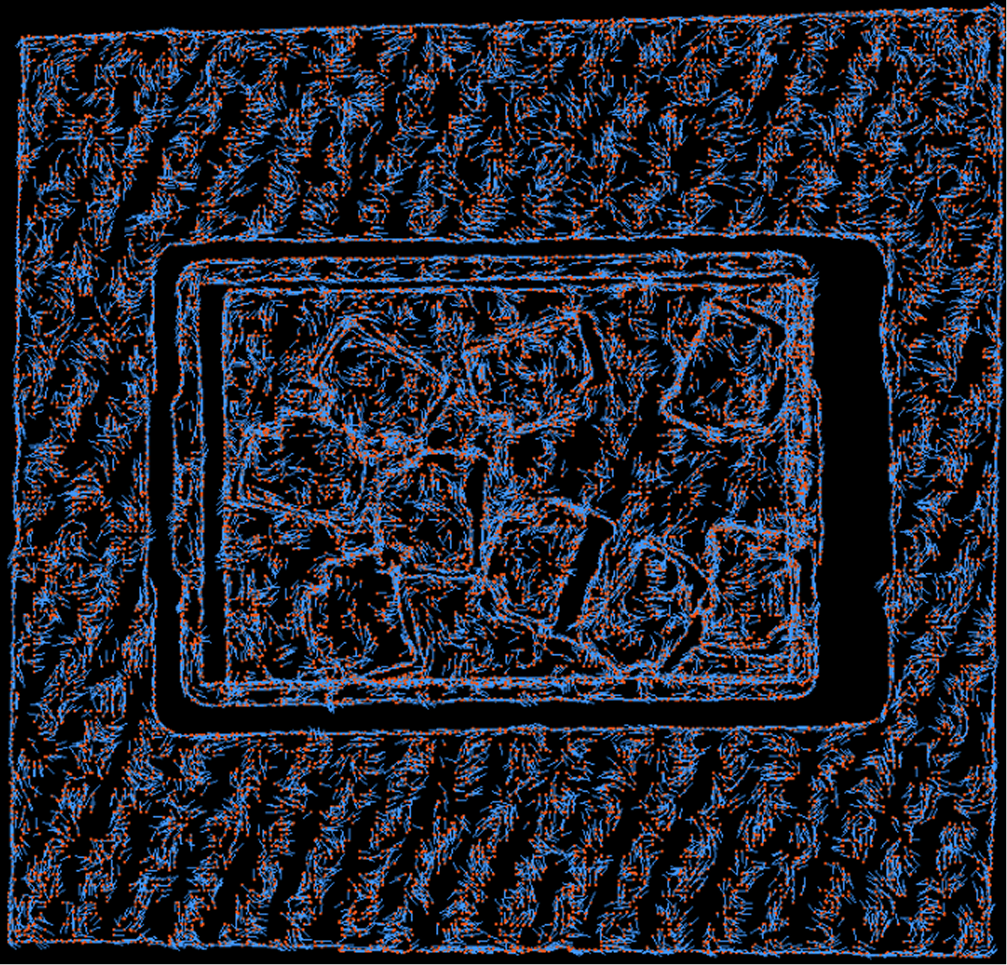
边缘角度阈值=150 |