🔷欧式聚类点云分割
功能描述
该算子基于点与点之间的欧氏距离对输入的点云进行聚类分割。它将空间位置上相互靠近的点聚合为独立的簇,如果一个点与某个已存在的簇中任意一点的距离小于设定的“搜索半径”,或者它可以连接到某个在半径内的点,那么这个点就被归入该簇。算子最终输出一个点云列表,列表中的每个点云代表一个分割出来的簇。
使用场景
-
实例分割 : 将场景中物理上分离的物体分割成独立的点云簇。例如,分割出输送带上的多个零件,或桌子上的多个杯子。
-
噪声去除 : 通过设置“聚类最少点数”,可以有效过滤掉那些点数过少的、可能是背景噪声或传感器误差产生的点云簇。
-
点云预处理 : 在进行目标识别、位姿估计等任务前,将原始点云或ROI内的点云分割成代表不同物体的单元。
-
与“连通域分割”算子功能非常相似,通常都利用空间邻近性进行聚类。
参数说明
|
该算子有两个版本:
两者核心功能和参数完全相同,仅处理的点云数据类型不同。 |
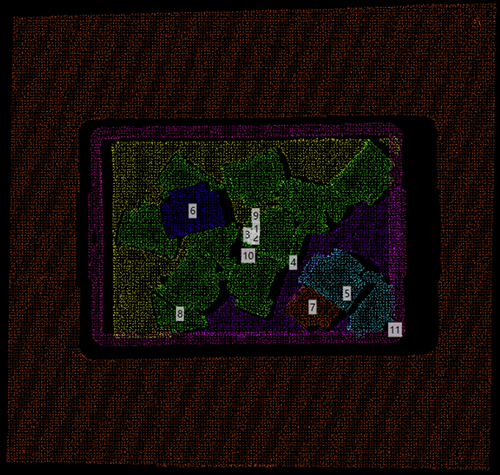
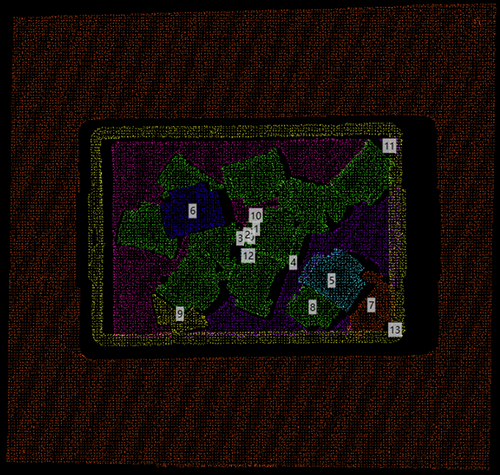
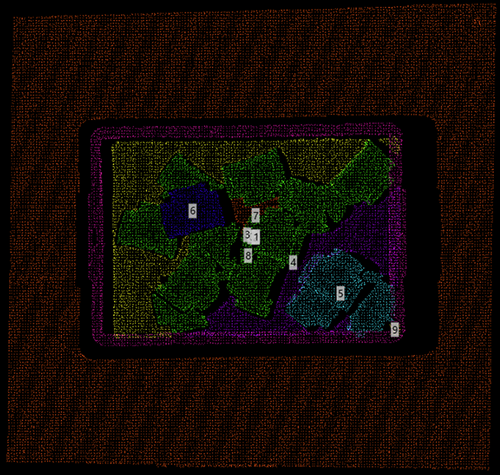
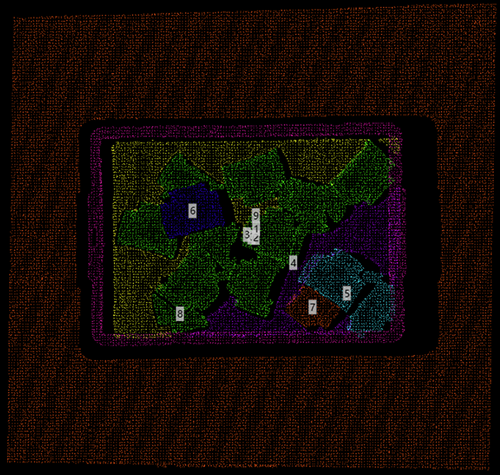
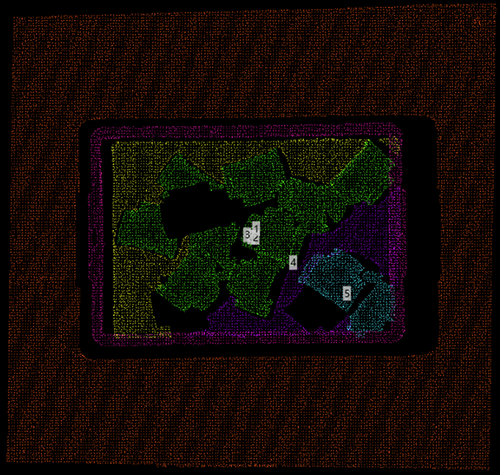
搜索半径
参数说明 |
定义了在聚类过程中,一个点可以被添加到某个簇的最大距离阈值。这也是查找邻近点时的搜索半径。 |
调参说明 |
|
参数范围 |
[0, 200],默认值:5,单位:mm |
|
|
|
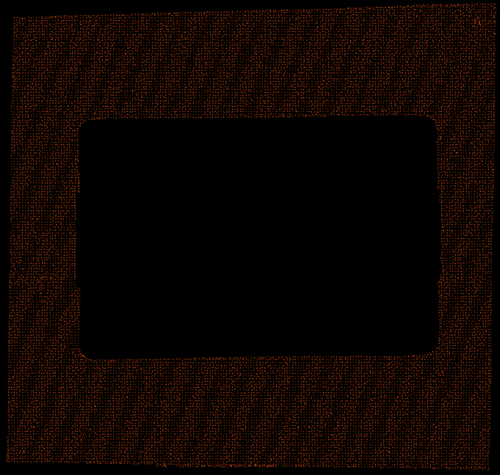
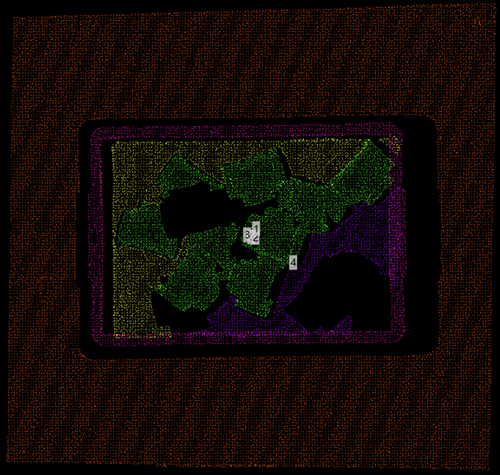
搜索半径=5mm |
搜索半径=10mm |
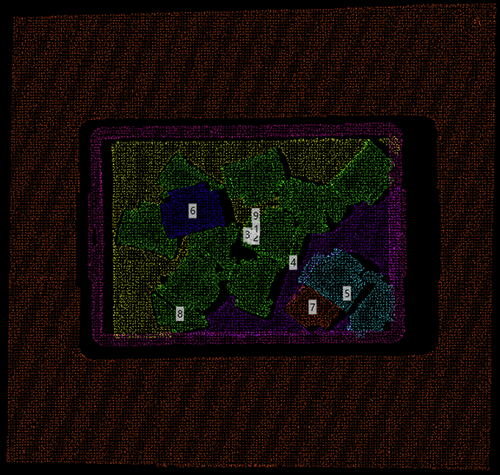
搜索半径=15mm |

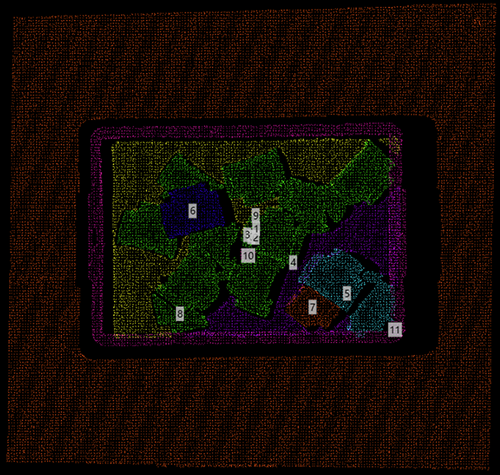
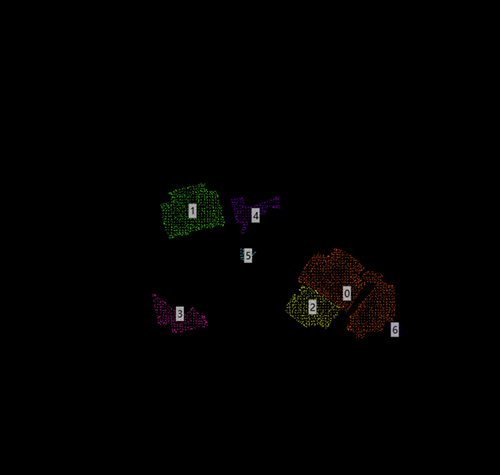
聚类最少点数
参数说明 |
一个有效的聚类簇必须包含的最小点数。 |
调参说明 |
用于过滤掉过小的点云簇。增大此值可以去除更多的小簇(通常被认为是噪声),但如果设置过大,可能会过滤掉尺寸较小的有效物体。 |
参数范围 |
[1, 4000000],默认值:100 |
|
|
|
聚类最少点数=20 |
聚类最少点数=100 |
聚类最少点数=1000 |
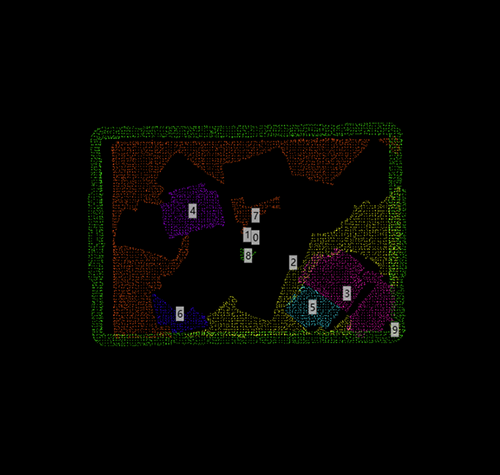
聚类最多点数
参数说明 |
一个有效的聚类簇允许包含的最大点数。 |
调参说明 |
用于过滤掉过大的点云簇。适用于需要排除背景、地面等超大聚类结果的场景。通常保持默认值(一个很大的数)即可,除非有特殊需求。 |
参数范围 |
[1, 4000000],默认值:4000000 |
|
|
|
聚类最多点数=2000 |
聚类最多点数=5000 |
聚类最多点数=4000000 |

是否保留全部结果
参数说明 |
决定是否输出所有满足大小条件的聚类结果。 |
调参说明 |
|
保留结果数量
参数说明 |
当“是否保留全部结果”设置为关闭时生效。指定要保留的点数最多的聚类簇的数量。 |
调参说明 |
算子会先按点云数量从大到小对所有分割结果进行排序。此参数设置为 N,则只输出排序后的前 N 个点云簇。例如,设置为 1 表示只输出点数最多的那个簇。 |
参数范围 |
[1, 1000],默认值:1 |
|
|
|
保留结果数量=1 |
保留结果数量=5 |
保留结果数量=10 |