🔷动态 ROI 生成
使用场景
-
多目标区域定义 : 当通过匹配或其他方式得到多个物体的位姿后,需要为每个物体定义一个相同大小和相对方向的ROI。
-
基于位姿的区域过滤 : 根据识别到的物体位姿,精确地过滤出每个物体周围的场景点云。
输入输出
输入项 |
roi参考点位姿:输入的位姿列表,定义了每个动态ROI的初始中心和朝向。 场景点云 (可选):输入的待过滤场景点云或点云列表。 |
|
输出项 |
3维ROI:根据输入位姿和模板ROI动态生成的ROI列表。 ROI后点云:如果输入了场景点云,则输出使用动态ROI过滤后的点云列表;否则此输出为空。 |
|
参数说明
|
该算子有两个版本:
两者核心功能和参数基本相同,仅处理的点云数据类型不同。 |
|
至少提供一个有效的模型文件或一个有效的场景点云,如果两者都缺失则会报错无法运行。 |
模型点云文件
参数说明 |
指定一个模型点云文件(.ply格式)。如果提供了该文件,算子在初始化时会加载它,这主要用于辅助用户在界面中配置“3维ROI”参数,使其与模型尺寸相匹配。 注意:非必选参数,算子运行时并不强制要求此模型必须存在,但输入的场景点云和此模型文件至少需要提供一个。 |
调参说明 |
如果希望基于一个具体的模型来定义模板ROI,则选择对应的.ply文件。如果不需要模型参考可以不设置,但必须确保运行时有场景点云输入。 |
3维ROI
参数说明 |
定义模板ROI,算子运行时会将模板ROI根据输入的每个参考点位姿进行变换,生成最终的动态ROI。 |
调参说明 |
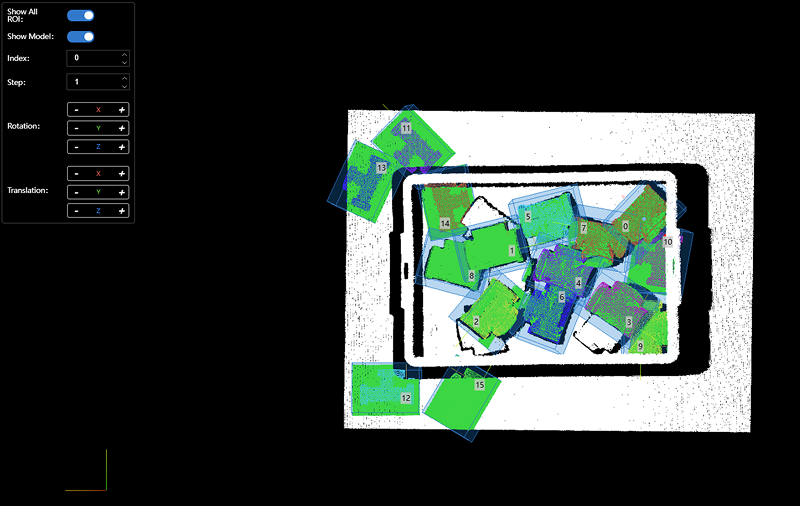
除了可以直接输入 ROI 参数之外,更加推荐点击参数设置面板右上角的“小眼睛”按钮,打开视图窗口进行可视化配置 ROI,更加便捷和直观。 |
保持有序
参数说明 |
控制输出点云是否保持输入的原始结构。 |
|
调参说明 |
关闭(默认):不保持有序。输出只包含ROI内部(如果开启反向则是外部)的点,丢弃无效点,点云变成无序的点列表。适用于绝大多数点云处理场景,特别是当后续步骤只处理有效点坐标,不需要原始结构时,输出的数据量通常远小于保持原始结构(包含大量无效点)的情况,后续处理更快。 |
|
开启:保持有序。输出的点云形状与输入相同,落在ROI范围外的点会被标记为无效点,但它们仍然占据着原来的位置,保留点与点之间的原始邻接关系,适用于后续需要利用点云空间邻接关系做图像处理操作的场景。 |
|
|

保持原大小
参数说明 |
仅当“保持有序”为开启,且输入点云是有序结构时生效,控制在保持有序结构的前提下,是否裁剪掉全为无效点的行和列。 |
调参说明 |
|

