🔷2D 图像边缘
使用场景
-
特征提取 : 在进行形状识别、目标检测或图像匹配等任务前,提取物体的轮廓边缘作为关键特征。
-
图像分割辅助 : 边缘信息可以作为图像分割算法的输入或参考。
-
视觉检测 : 检测产品表面的划痕、裂缝等缺陷,这些缺陷通常表现为明显的边缘。
输入输出
输入项 |
图像: 需要进行边缘检测的图像,支持灰度图或彩色图(彩色图会自动转换为灰度图处理) |
|
输出项 |
结果图像: 经过 Canny 算法处理后得到的边缘图像。这是一个二值化的灰度图,其中检测到的边缘像素通常为白色,背景像素为黑色。 |
|

参数说明
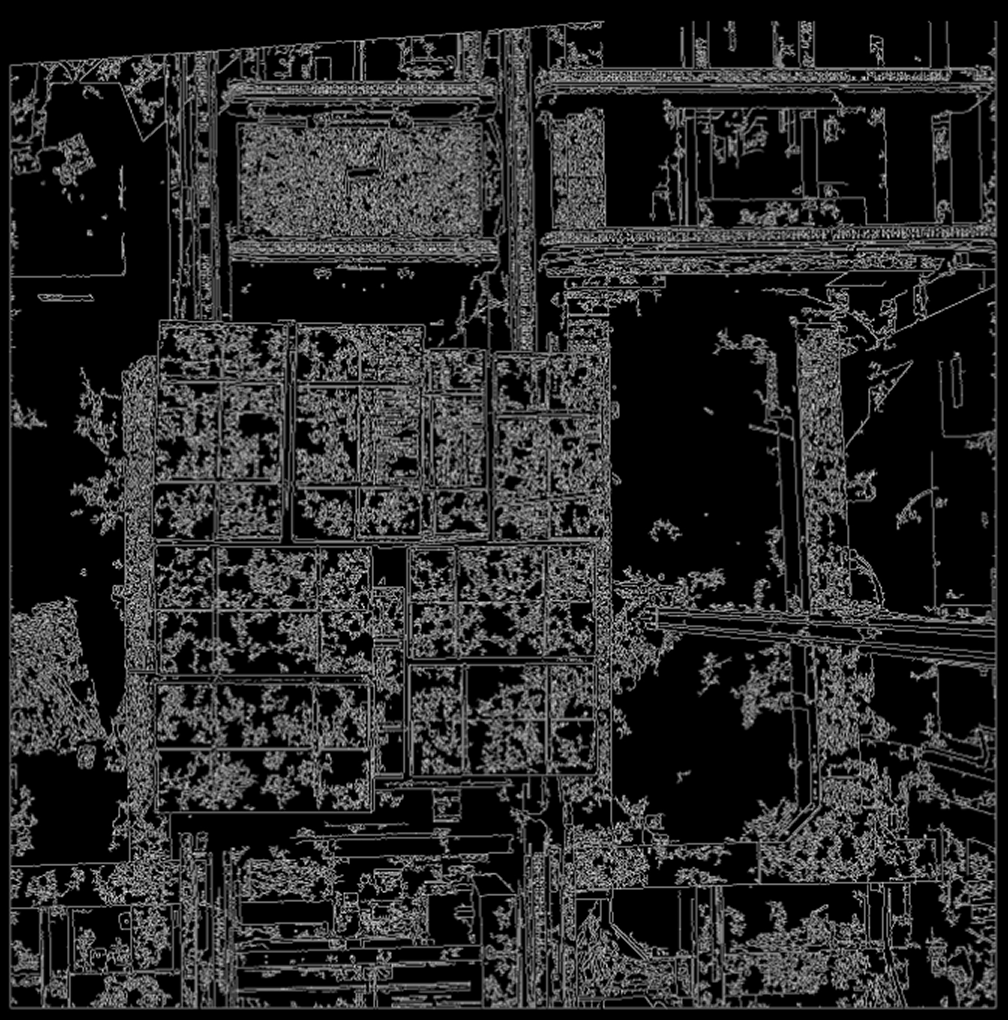
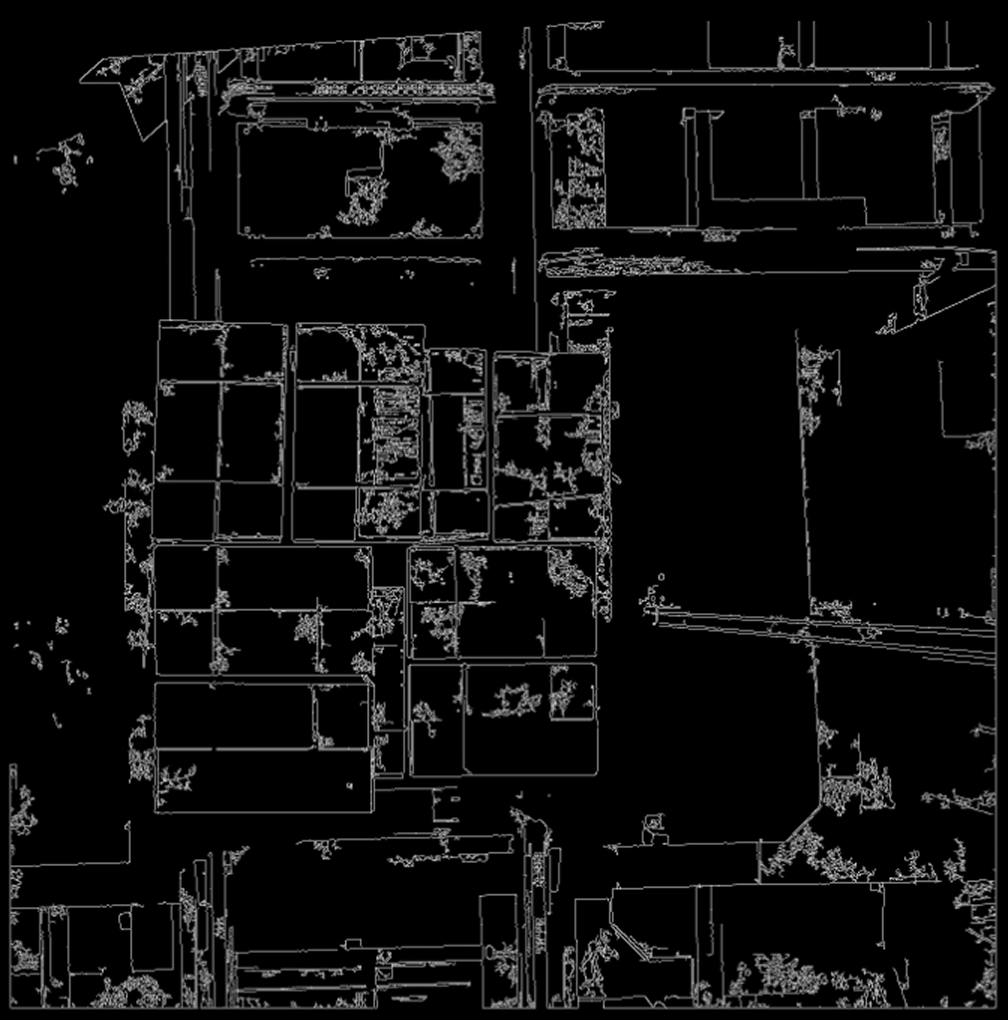
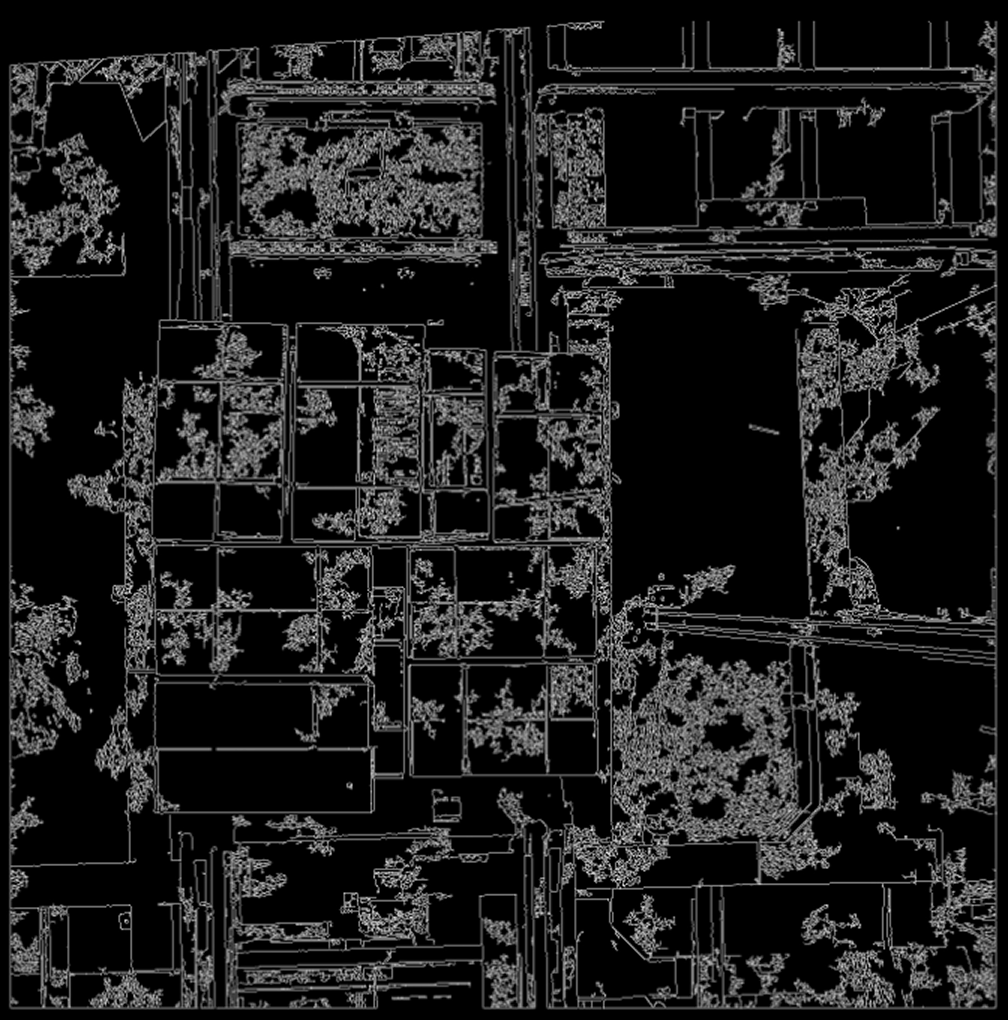
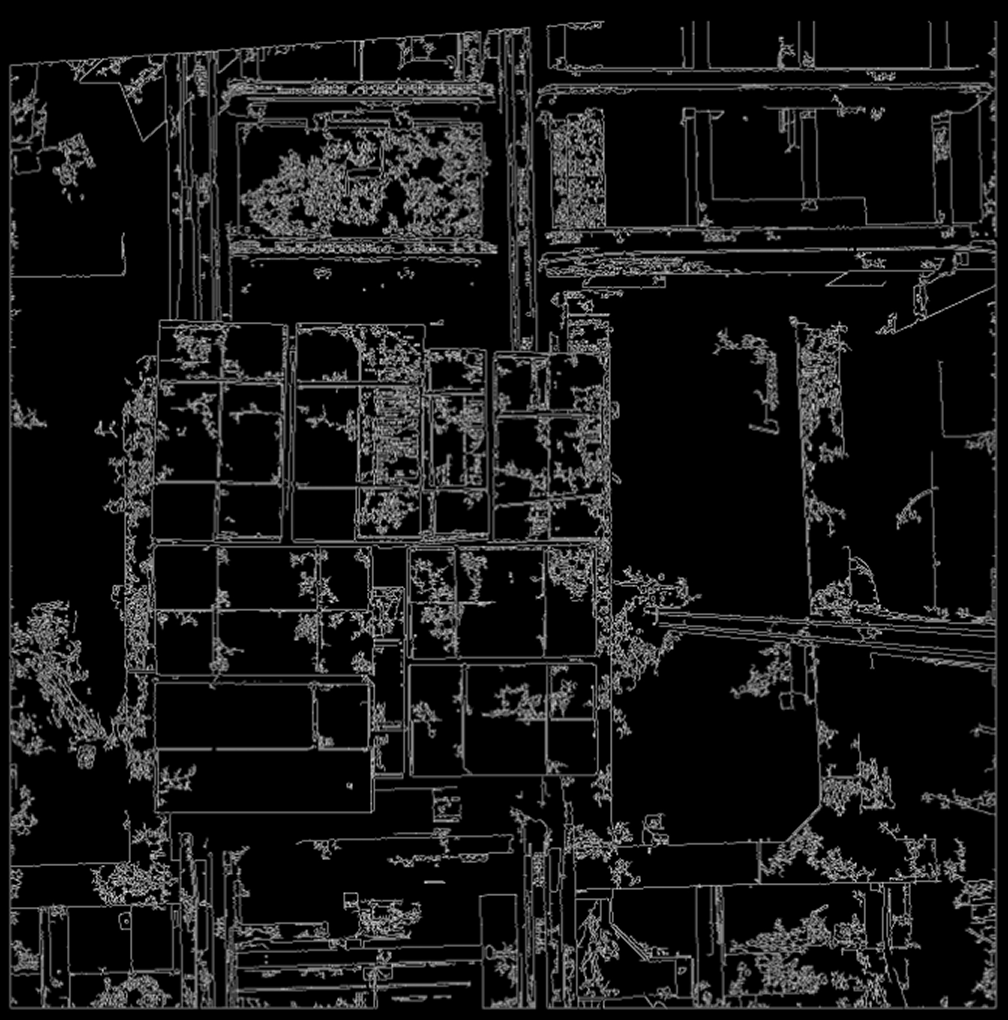
低阈值
参数说明 |
低阈值,像素的梯度幅值如果低于此值,则不会被视为边缘候选点。 |
调参说明 |
调低阈值:可能会使得不太明显、比较弱的边缘,也有机会被保留下来,这样会使得边缘线条会更完整、更连贯,但也可能会把一些原本不是边缘的“噪声”也误判为边缘。 调高阈值:则是更严格地筛选边缘,只有那些变化强烈的部分才会被保留,弱边缘会被忽略掉。 |
参数范围 |
[0, 1000],默认值:1 |
|
|
|
|
低阈值=1 |
低阈值=50 |
低阈值=100 |
低阈值=200 |


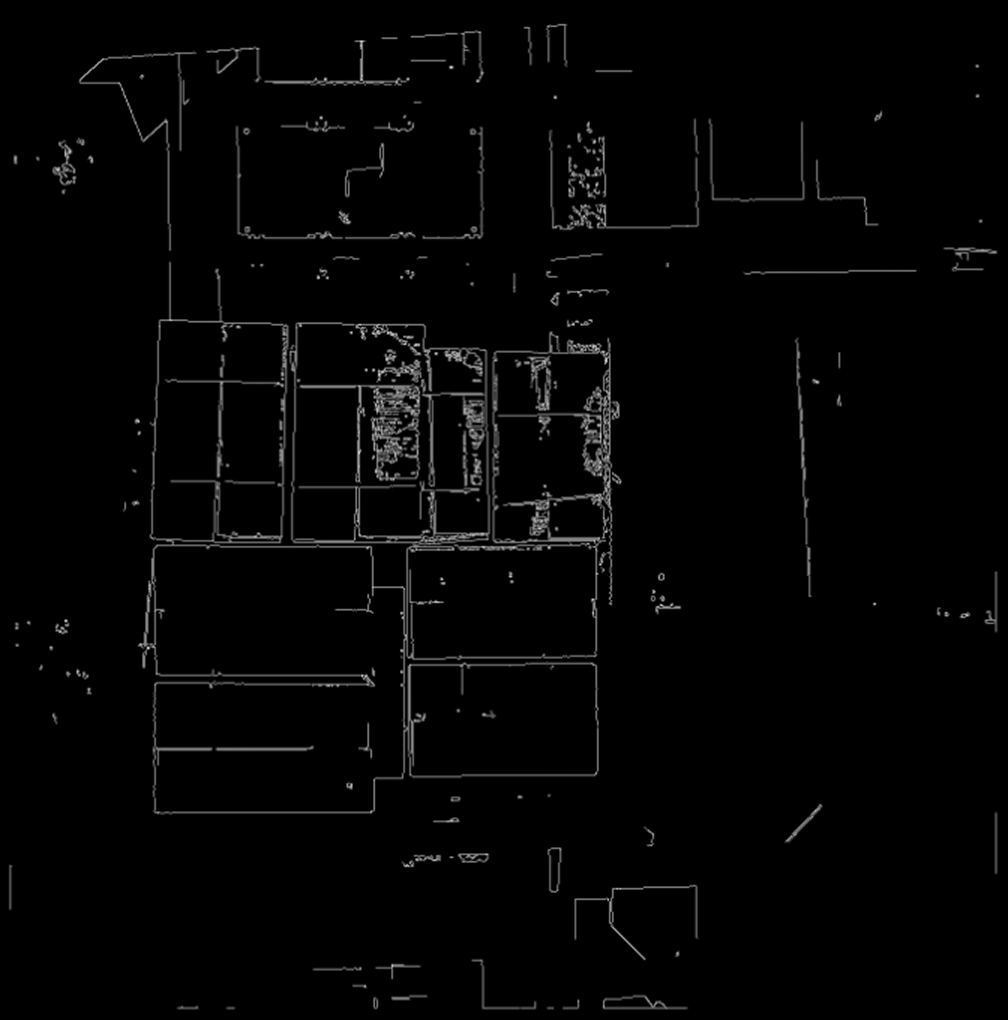
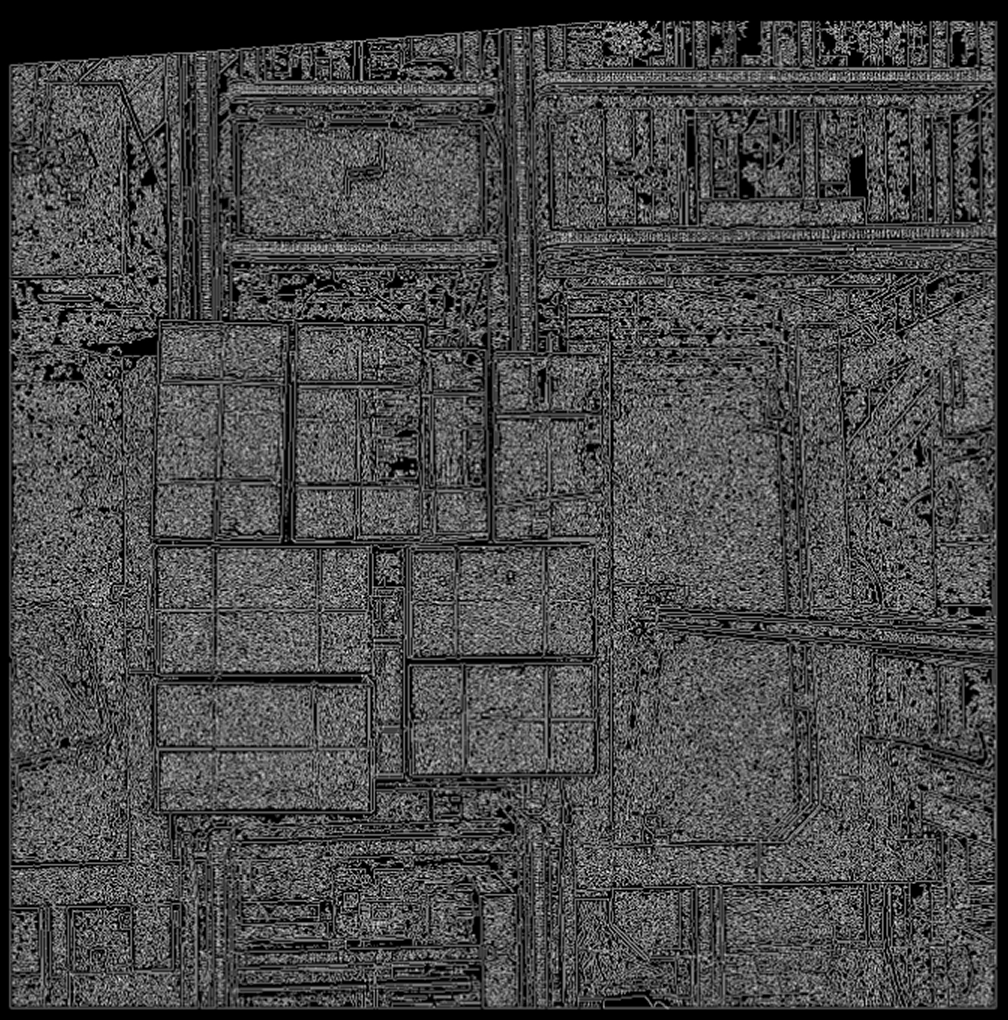
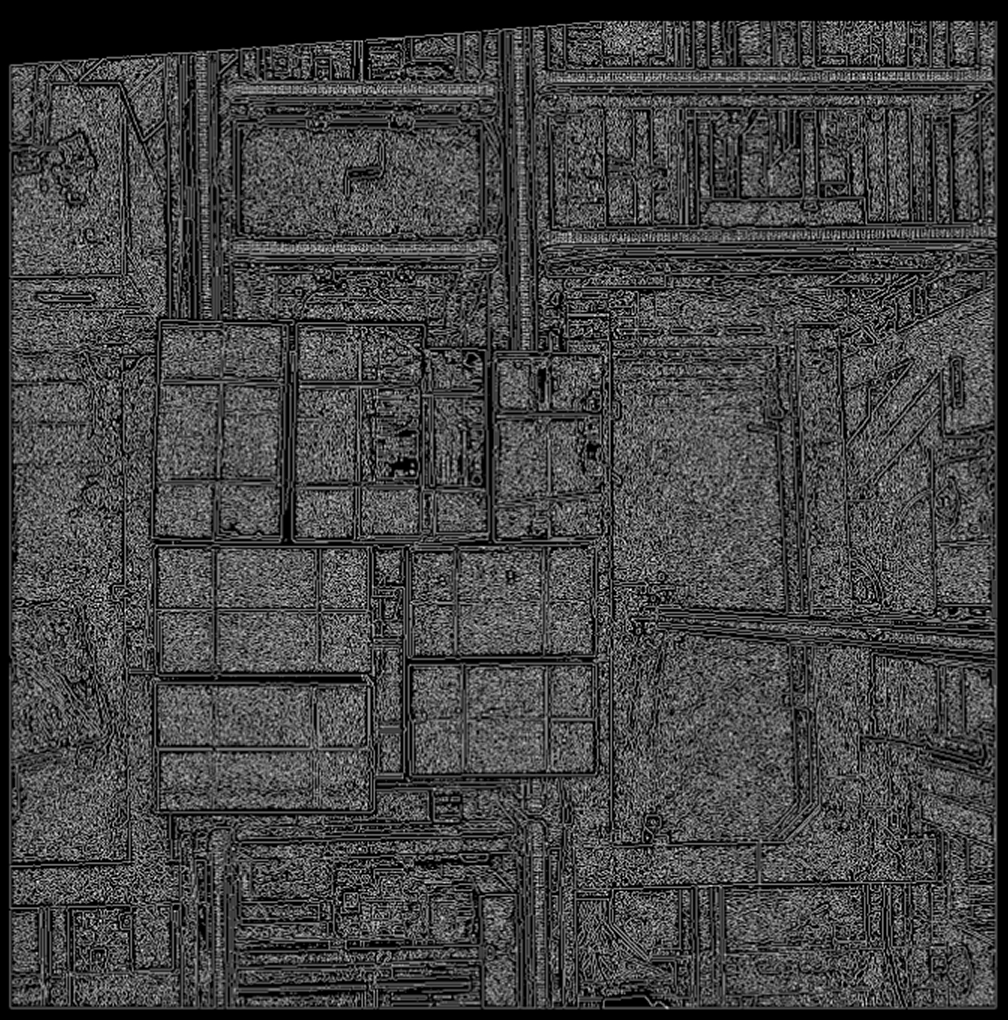
高阈值
参数说明 |
高阈值,像素的变化强度如果高于此值,则一定会被判断为边缘点。 |
调参说明 |
提高阈值:会使得只有非常明显的边缘才被检测到,结果中的边缘数量可能会减少; 降低阈值:会检测到更多较弱的边缘,边缘数量可能会增加,但也可能包含更多由噪声或纹理引起的假边缘。 |
参数范围 |
[0, 1000],默认值:100 |
|
|
|
高阈值=50 |
高阈值=100 |
高阈值=200 |