🔷点云法向估计
功能描述
该算子用于为输入的点云数据中的每个点估计其表面法向量。
法向量是一个垂直于点所在局部表面的三维向量,表示该点的朝向。
算子采用基于 K 近邻的方法:对于点云中的每个点,查找其最近的 K 个邻近点,然后通过这些邻近点拟合一个局部平面,该平面的法向量即作为该点的法向量估计值。
使用场景
-
特征提取 : 法向量及其分布是重要的几何特征,可用于点云匹配、分割和识别任务等。
-
平面拟合与检测 : 法向量信息有助于识别和分割平面区域。
-
表面分析 : 分析物体表面的曲率、平滑度等。
-
机器人抓取 : 判断物体表面的可抓取性或计算抓取姿态时,可能需要法向量信息。
参数说明
|
视点
参数说明 |
定义一个三维坐标 [X, Y, Z],通常为相机坐标系的原点 [0, 0, 0],用于调整计算出的法向量方向。 |
调参说明 |
法向量有两个可能的方向(指向表面内或指向表面外)。算子计算出初始法向量后,会计算从当前点指向视点的向量与初始法向量的夹角,如果夹角大于90度,算子会将法向量反向,以确保法向量大致指向视点方向。 |
参数范围 |
默认值:[0,0,0] |
搜索数量
参数说明 |
在为每个点估计法向量时,需要查找其周围邻近点的数量,用这些邻居拟合一个小平面,平面的法向量就是该点的法向量。 |
调参说明 |
搜索数量的选择会影响法向量估计的稳定性和对局部细节的敏感度。
需要根据点云的密度、噪声水平以及应用需求来选择合适的搜索数量。 |
参数范围 |
[1, 200],默认值:15 |
|
|
|
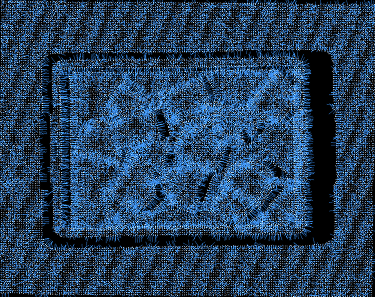
搜索数量=5(细节敏感) |
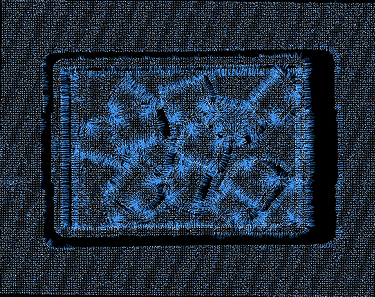
搜索数量=15(默认值) |
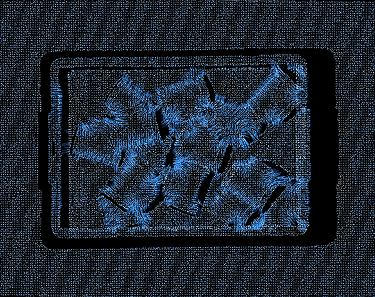
搜索数量=200(高度平滑) |