🔷点云边缘提取-无序(旧版)
功能描述
该算子用于从输入的带法向的无序点云中提取边缘点。它通过分析点云中每个点与其邻近点的法向量方向差异来识别边缘,可选择使用K近邻(KNN)或半径搜索(RADIUS)来定义邻域。如果一个点与其邻域内点的法向量之间的最大角度差超过了设定的“边缘角度阈值”,则该点被识别为边缘点。算子还可以选择是否调整输出边缘点的法向量方向。
输入输出
输入项 |
带法向点云: 输入的必须是带有法向量信息的无序点云或点云列表。 |
|
输出项 |
点云边缘: 提取出的边缘点组成的点云列表。输出的点云只包含被识别为边缘的点,并保留其原始的坐标和法向量信息(法向可能经过调整)。 |
|
参数说明
边缘角度阈值
参数说明 |
判断一个点是否为边缘点的法向量角度差阈值。 |
调参说明 |
算子会计算每个点与其邻近点的法向量之间的角度差。如果这些角度差中的最大值 超过 了这里设定的阈值,该点就被视为边缘点。
|
参数范围 |
[0, 180],默认值:90,单位:度 |
|
|
|
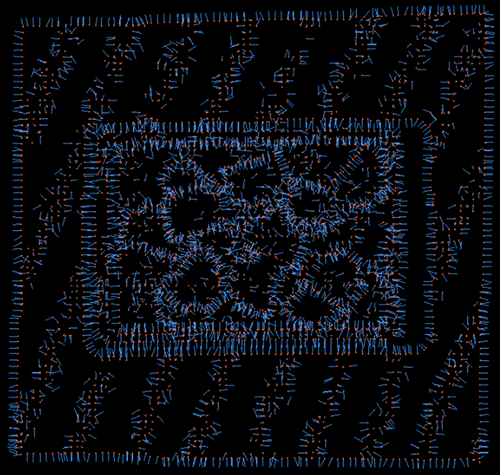
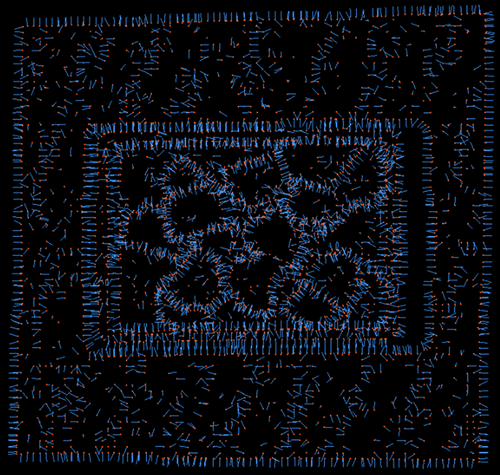
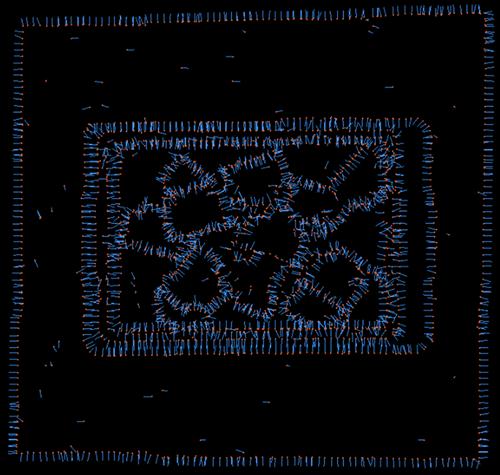
边缘角度阈值=10 |
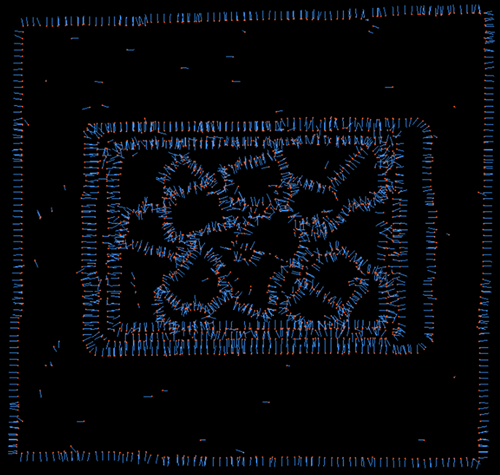
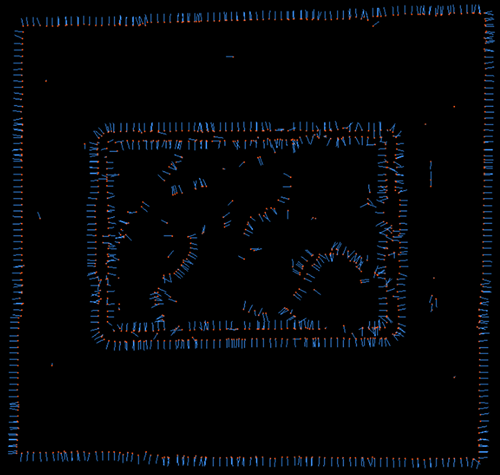
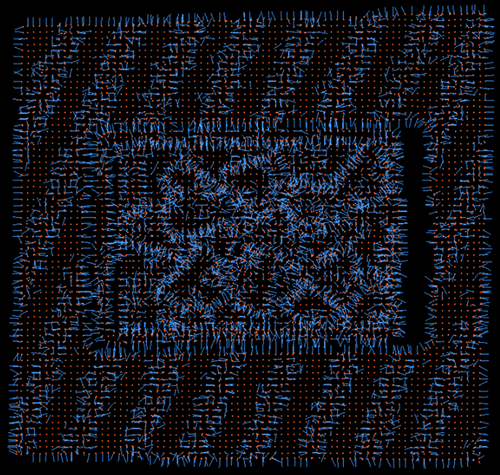
边缘角度阈值=90 |
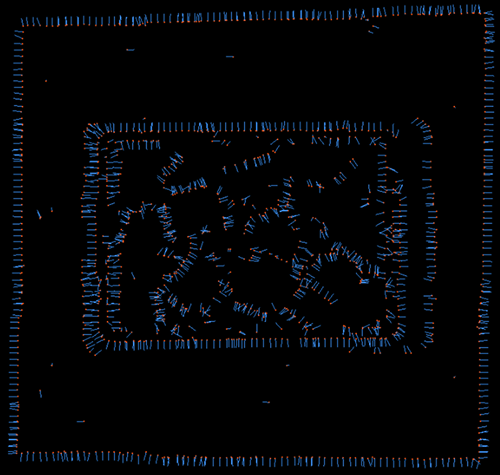
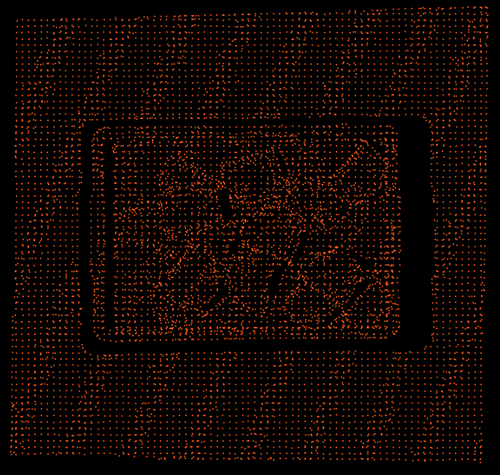
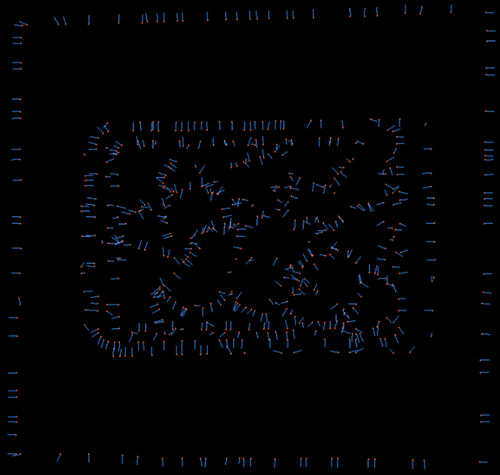
边缘角度阈值=180 |
调整边缘法向
参数说明 |
选择是否在提取边缘点后,对其法向量进行调整。 |
|
调参说明 |
开启(默认):对识别出的边缘点的法向量进行重新计算和调整,使其尽可能垂直于边缘走向并指向一致的方向(朝外或朝里)。 |
|
关闭:保留边缘点原始的法向量。 |
|
|
近邻搜索方法
参数说明 |
选择定义每个点邻域范围的方法。 |
|
调参说明 |
数目搜索 (默认): 查找距离当前点最近的 K 个点作为邻域,意味着始终取固定数量的邻近点,无论这些点之间的实际距离有多远,K 的值由“近邻搜索数目”参数指定。 |
|
半径搜索: 意味着以一个固定的物理距离为半径,查找所有落在这个范围内的点,半径值由“近邻搜索半径”参数指定。 |
|
|
近邻搜索数目
参数说明 |
当“近邻搜索方法”选择“数目搜索”时生效. |
调参说明 |
控制邻近点数量:
|
参数范围 |
[0, 100000] ,默认值:20 |
|
|
|
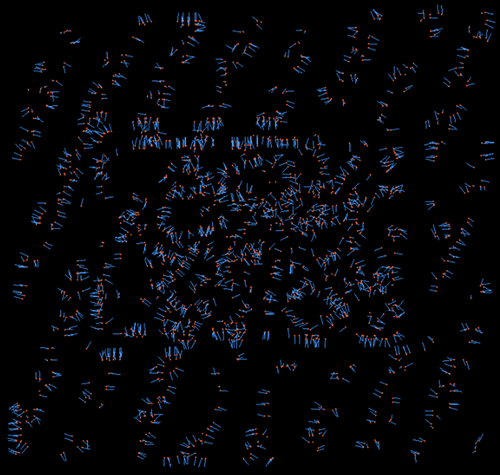
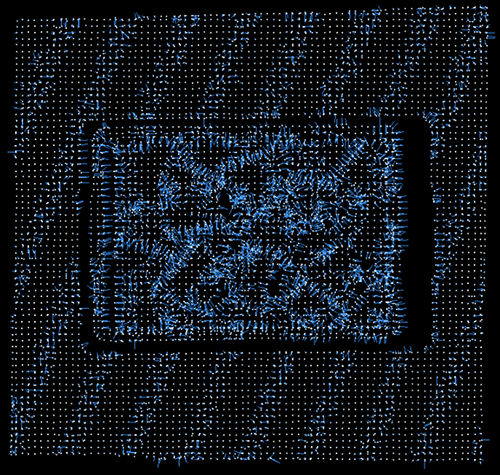
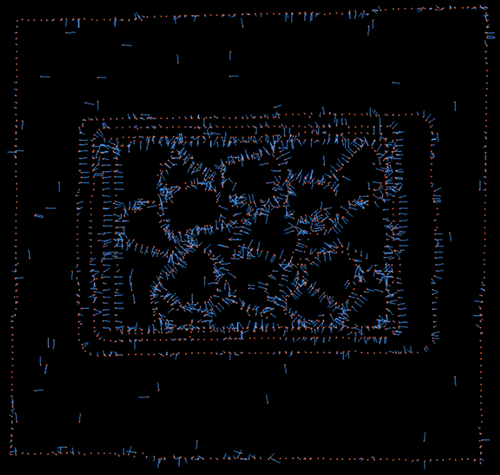
近邻搜索数目=10 |
近邻搜索数目=20 |
近邻搜索数目=100 |