🔷点云边缘提取-有序(旧版)
功能描述
该算子专门用于从输入的带法向的有序点云中提取边缘点。它通常通过比较相邻像素点之间的深度值(Z坐标)差异来检测边缘。利用了点云的有序结构信息进行计算。算子同样可以选择是否调整输出边缘点的法向量方向。
参数说明
最小边缘距离
参数说明 |
用于判断深度不连续性的距离阈值。如果相邻点之间的深度(通常是Z坐标)差大于此值,则认为存在边缘。 |
调参说明 |
根据场景中期望检测的边缘的深度落差来设置,较小的值对微小的深度变化敏感,较大的值只检测更明显的深度变化。 |
参数范围 |
[0, 1000],默认值:50 |
|
|
|
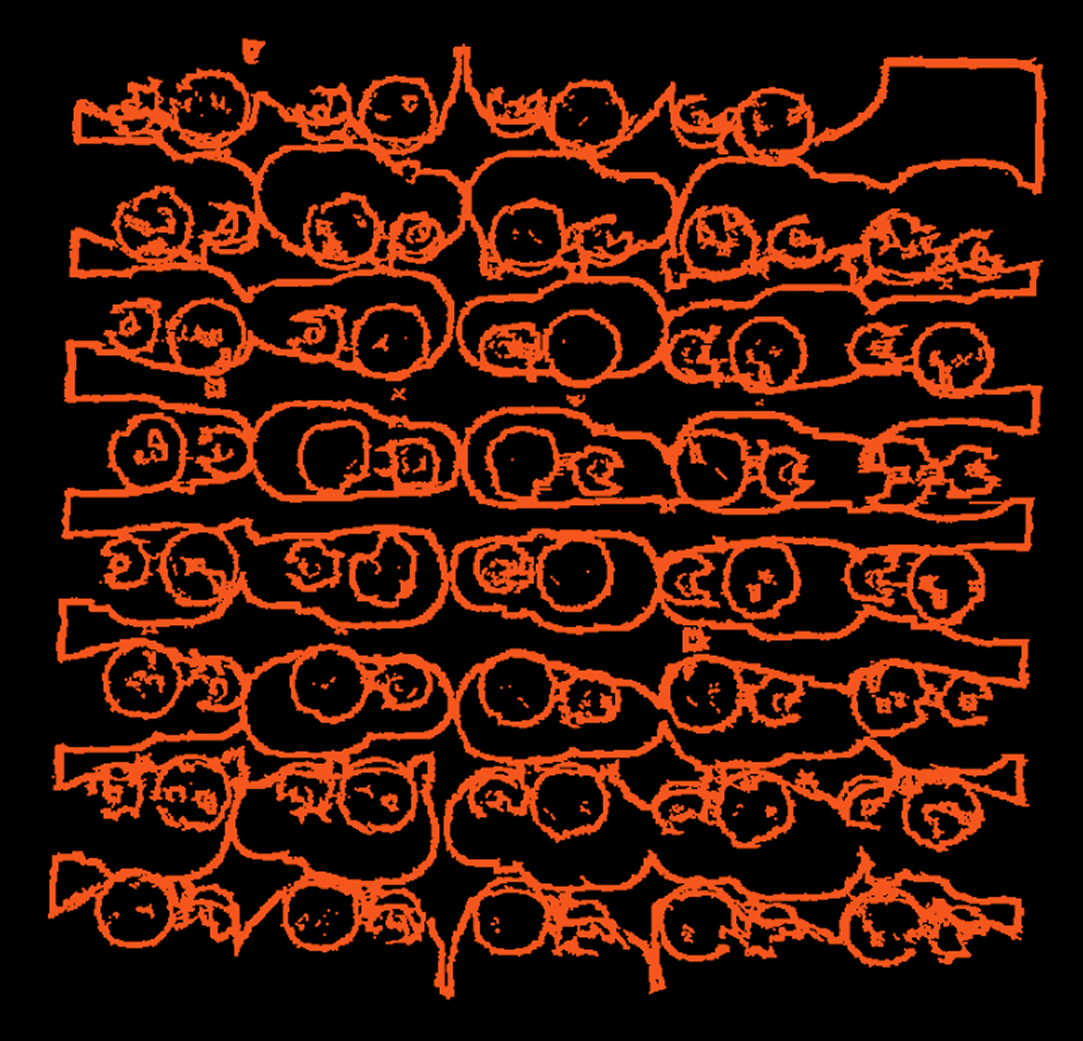
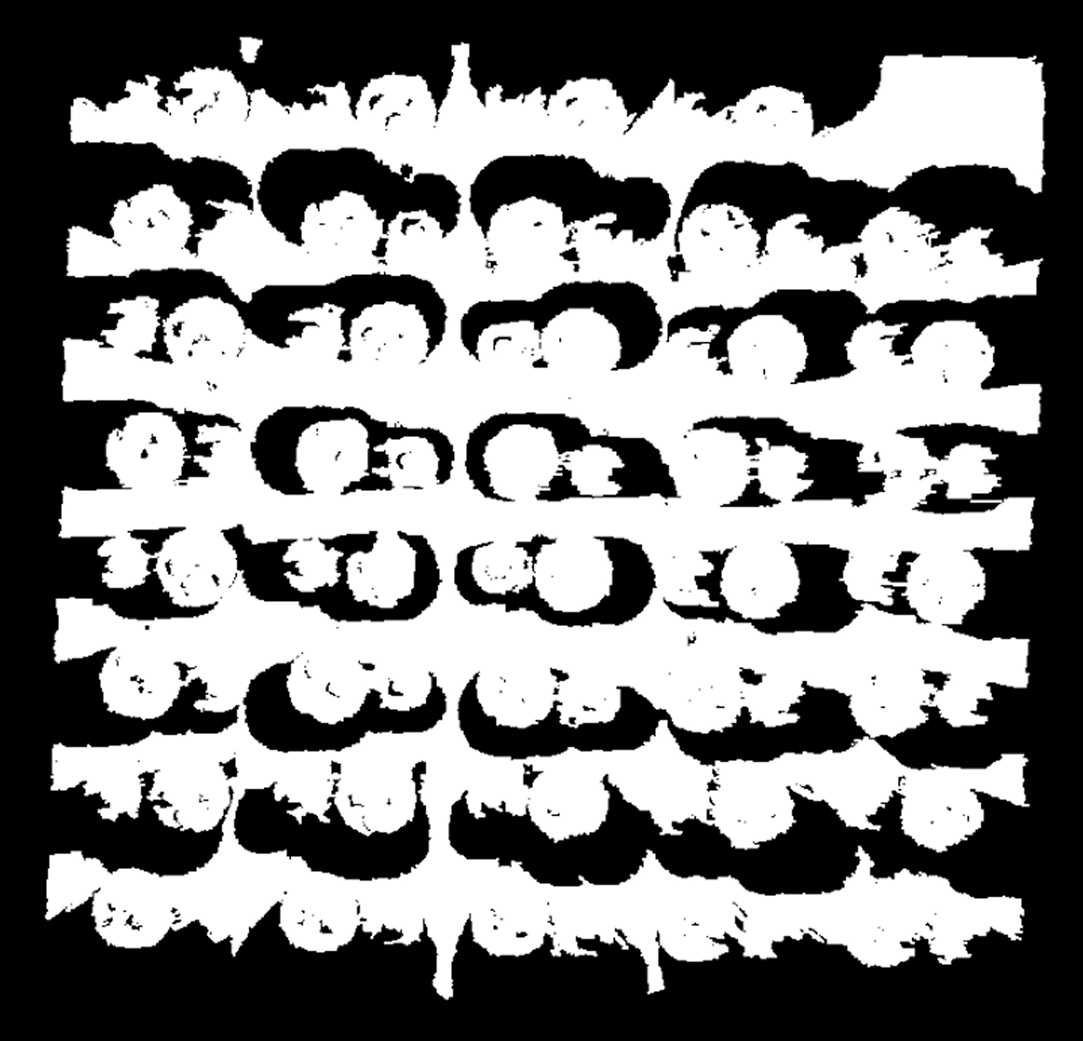
最小边缘距离=50 |
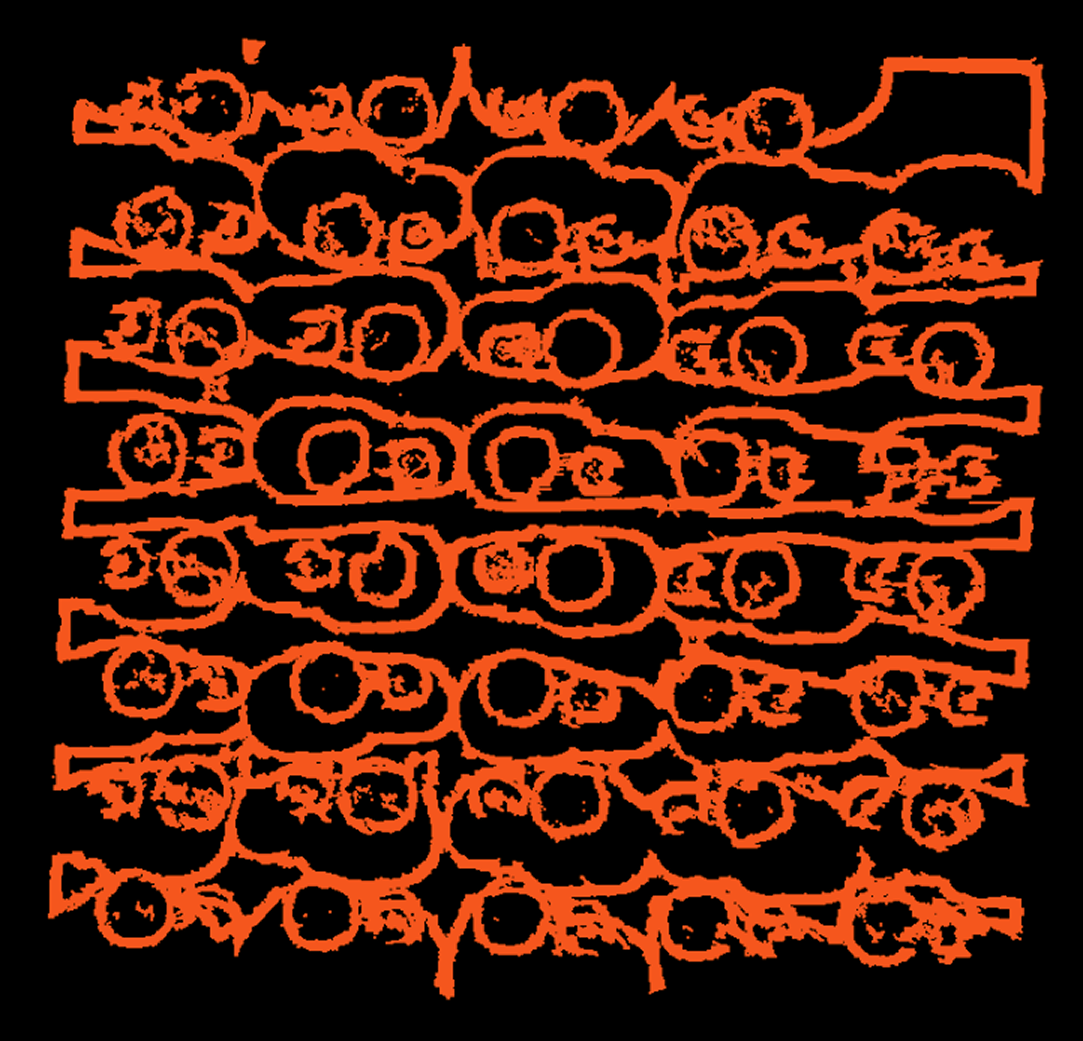
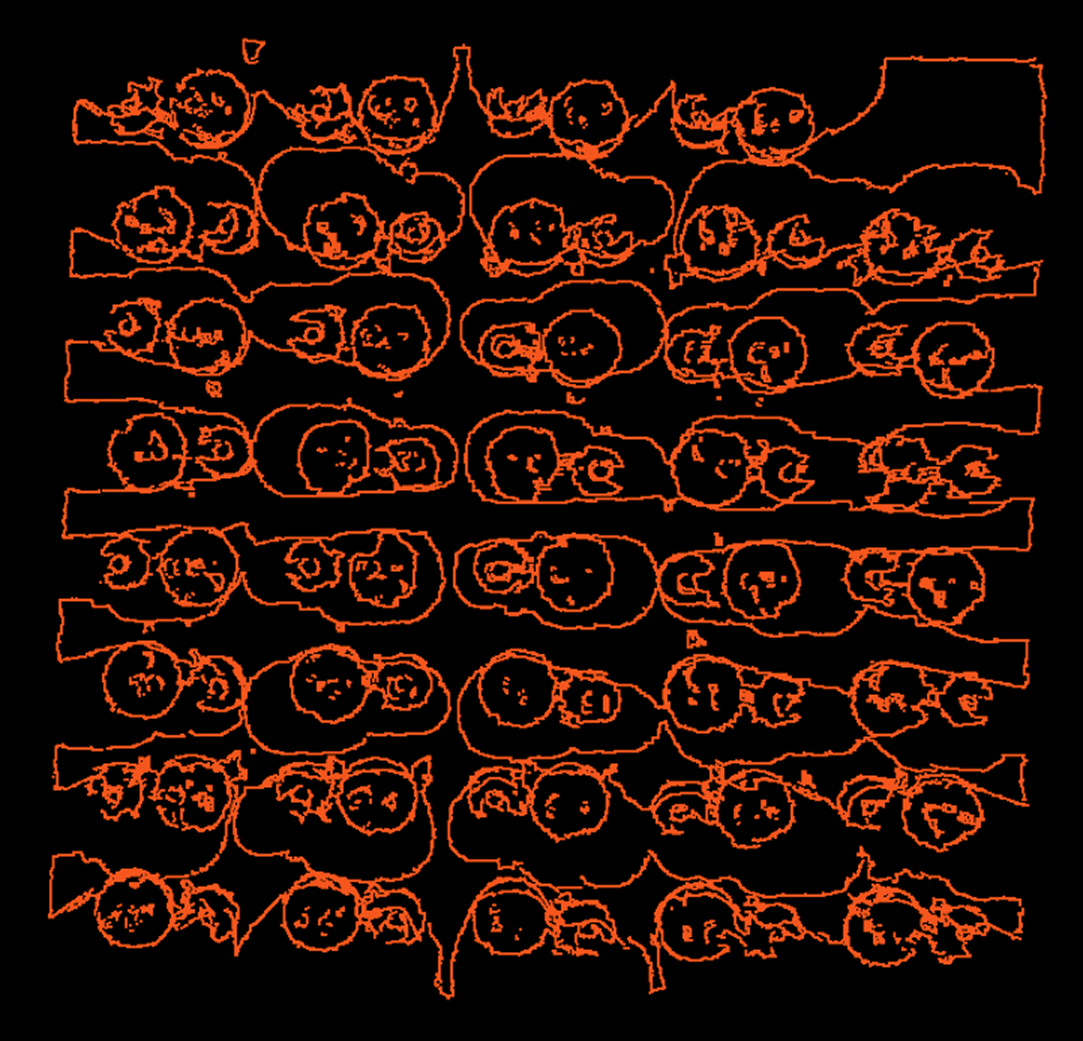
最小边缘距离=100 |
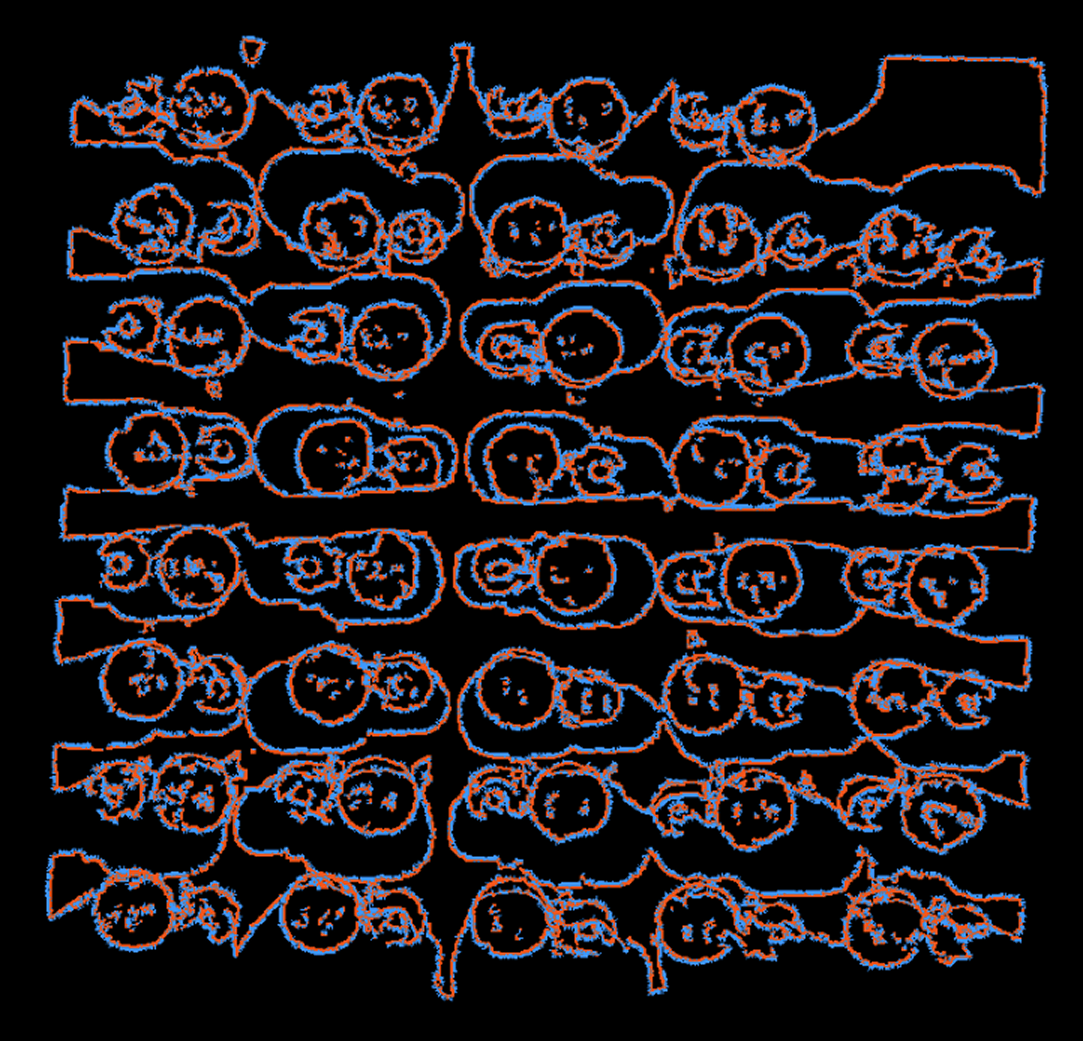
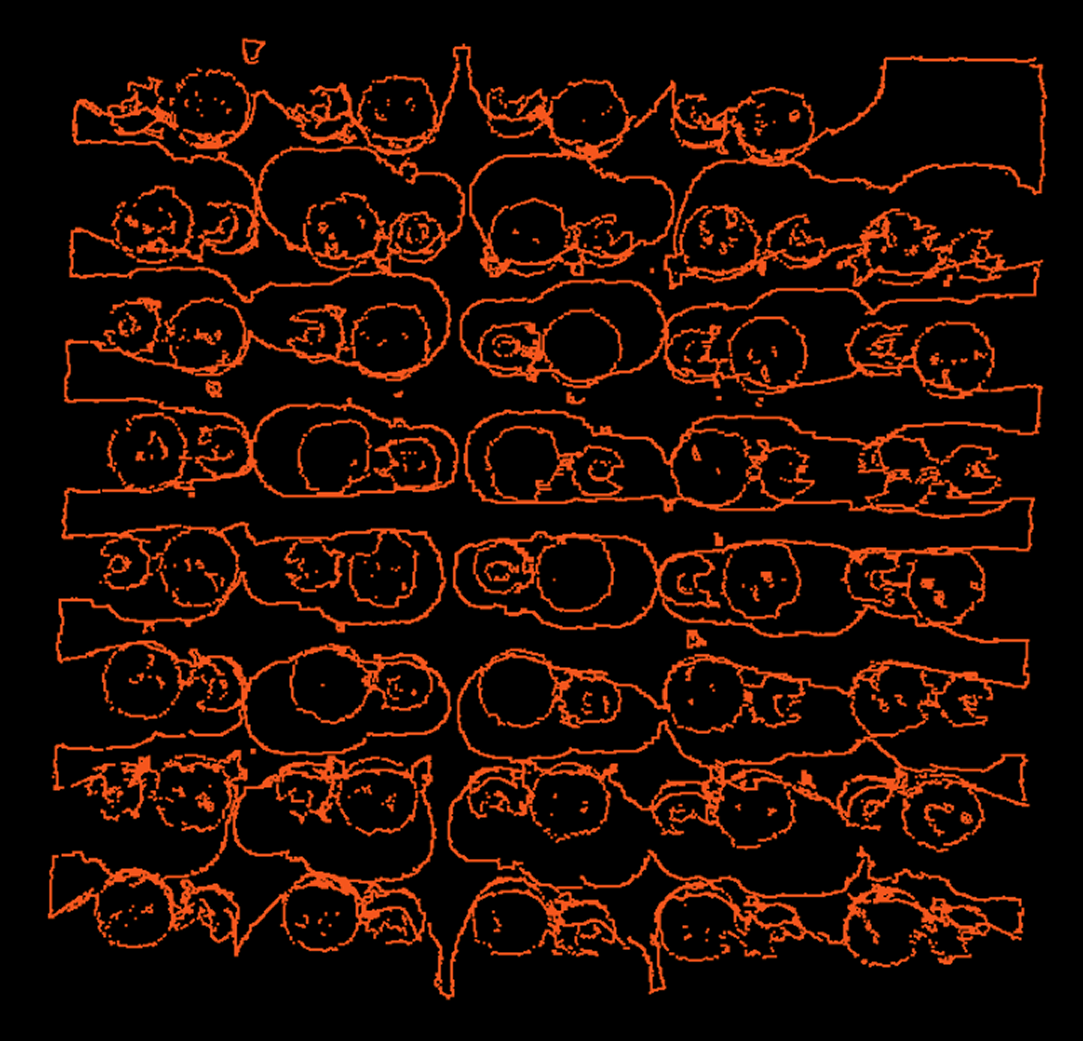
最小边缘距离=200 |
搜索窗口大小
参数说明 |
在有序点云的网格结构上,进行邻域比较时使用的窗口半径。例如,值为1表示比较中心点与其直接相邻的8个点,构成3x3窗口,窗口尺寸 = (2 × 半径 + 1) × (2 × 半径 + 1)。 |
调参说明 |
定义边缘判断时考虑的局部邻域范围。增大此值会考虑更远的邻居,可能使边缘更平滑。 |
参数范围 |
[0, 10000] ,默认值:1 |
|
|
|
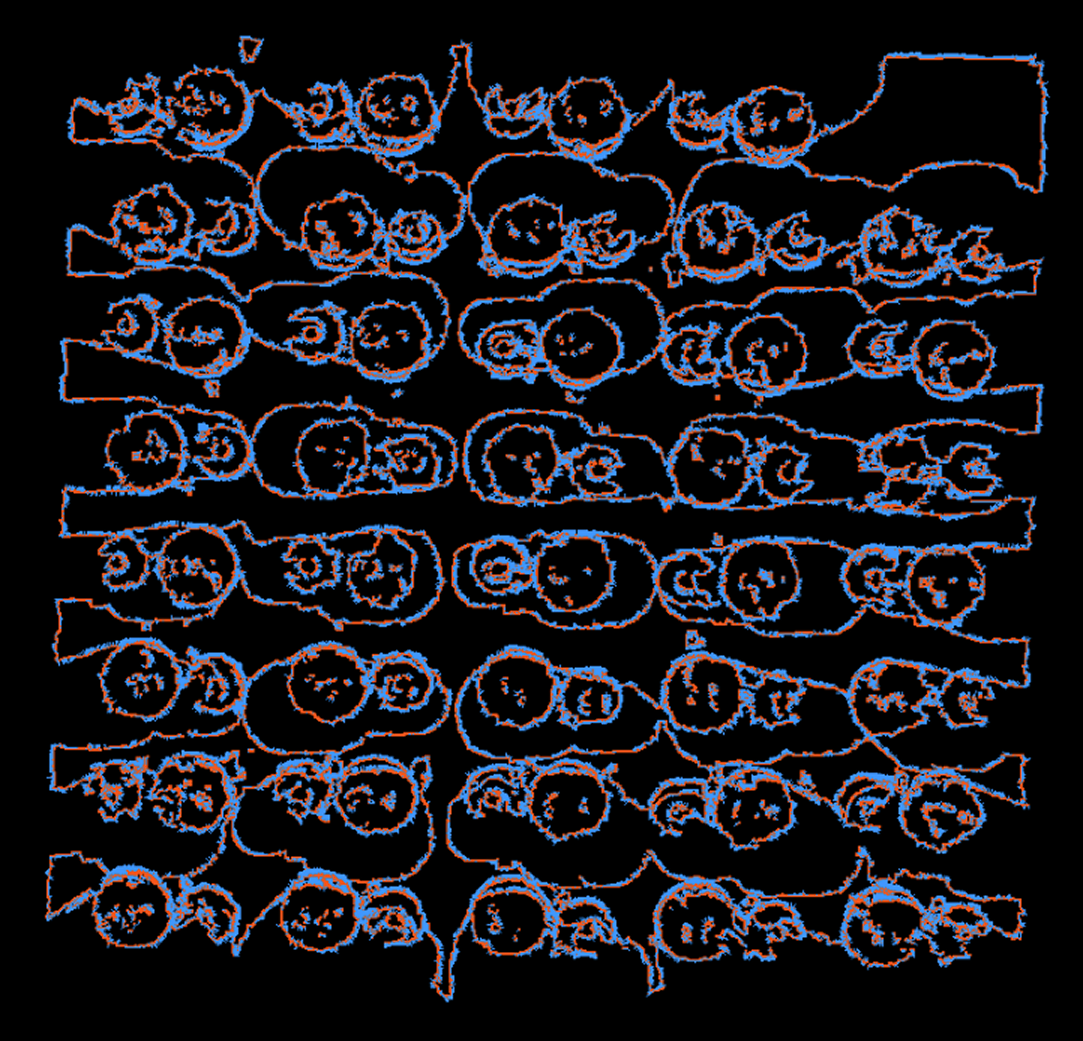
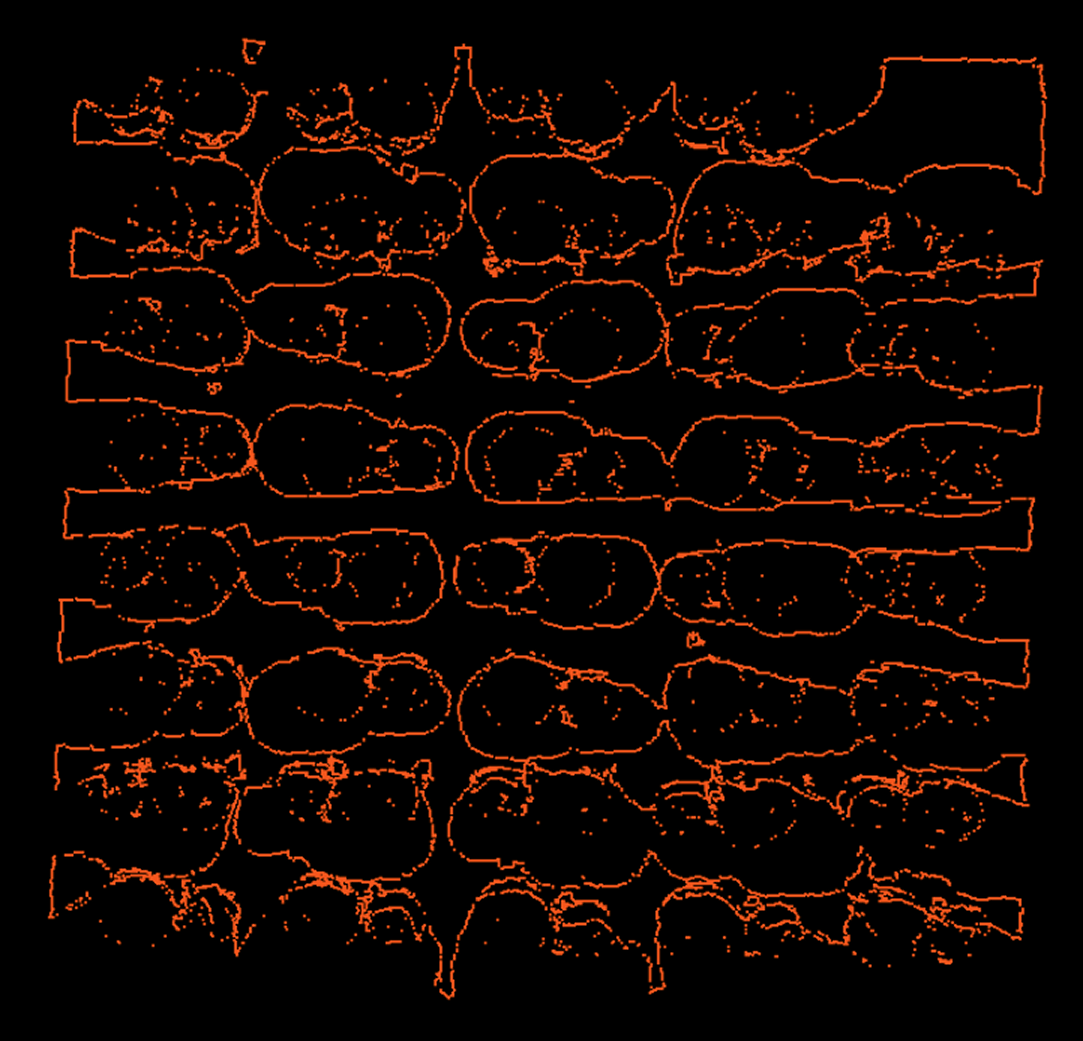
搜索窗口大小=1 |
搜索窗口大小=5 |
搜索窗口大小=10 |