3Dラフマッチ
パラメータ説明
パラメータ設定
モデルポイントクラウドファイル
パラメータ説明 |
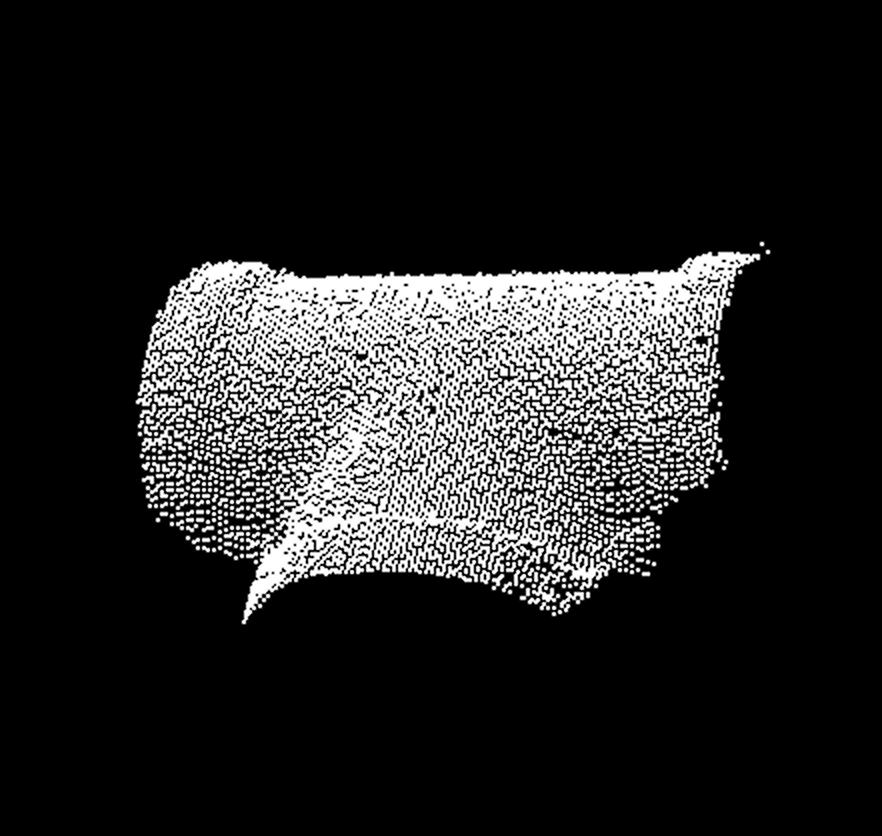
このパラメータは、マッピングパラメータを介してマッチングモデルライブラリ内のポイントクラウドテンプレートを選択するか、ワークテンプレートのポイントクラウドファイルを直接アップロードすることができます。アップロードされたポイントクラウドファイルはダウンロードすることもできます。 |
モデル切り替え方法 |
【ファイルをアップロード】をクリックしてポップアップウィンドウを開き、ポイントクラウドファイルを選択して直接アップロードするか、マッピングパラメータを介して切り替えます。 |
距離離散量
デフォルト値 |
20 |
パラメータ範囲 |
2-500 |
パラメータ説明 |
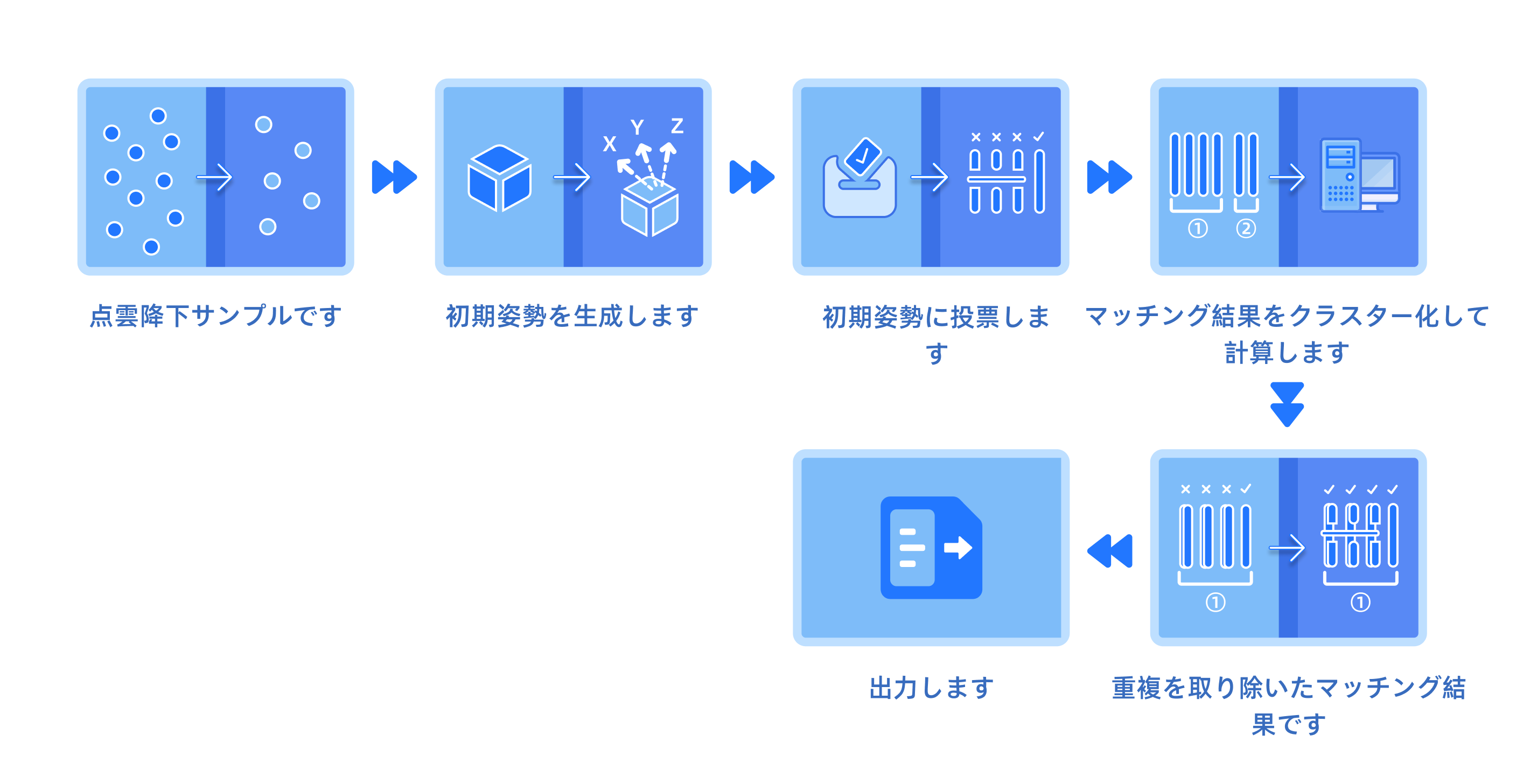
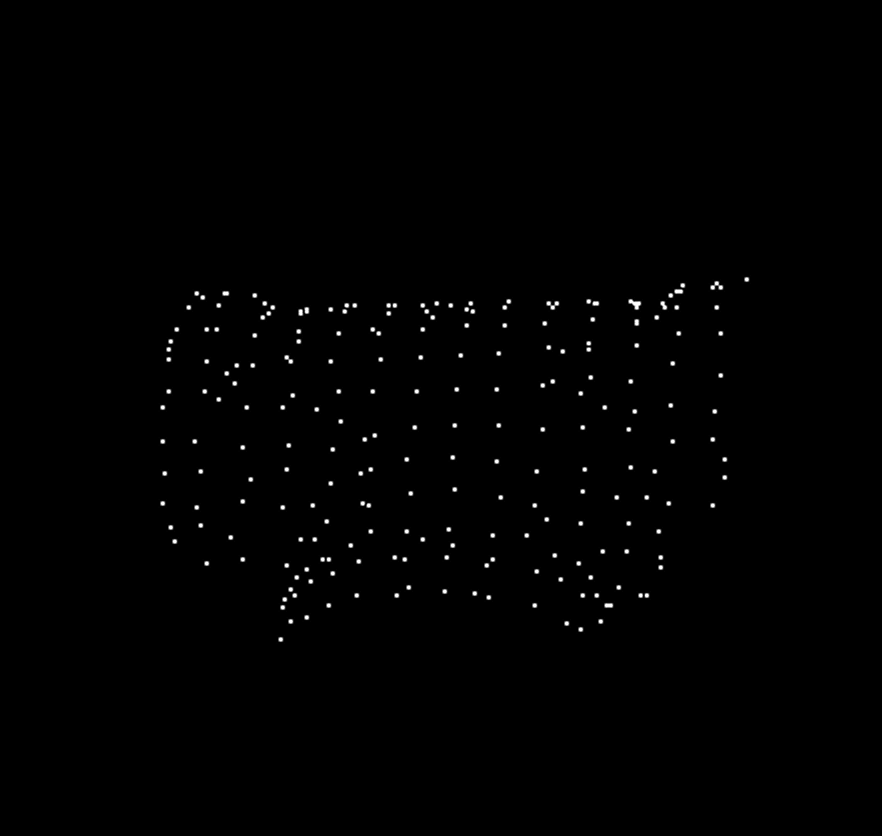
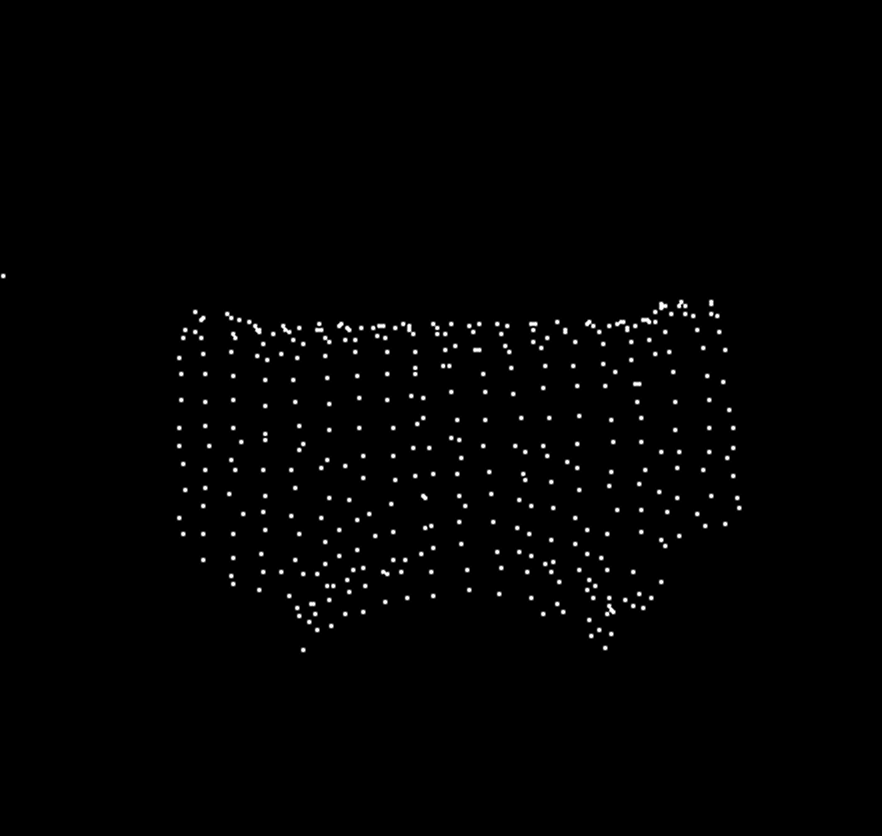
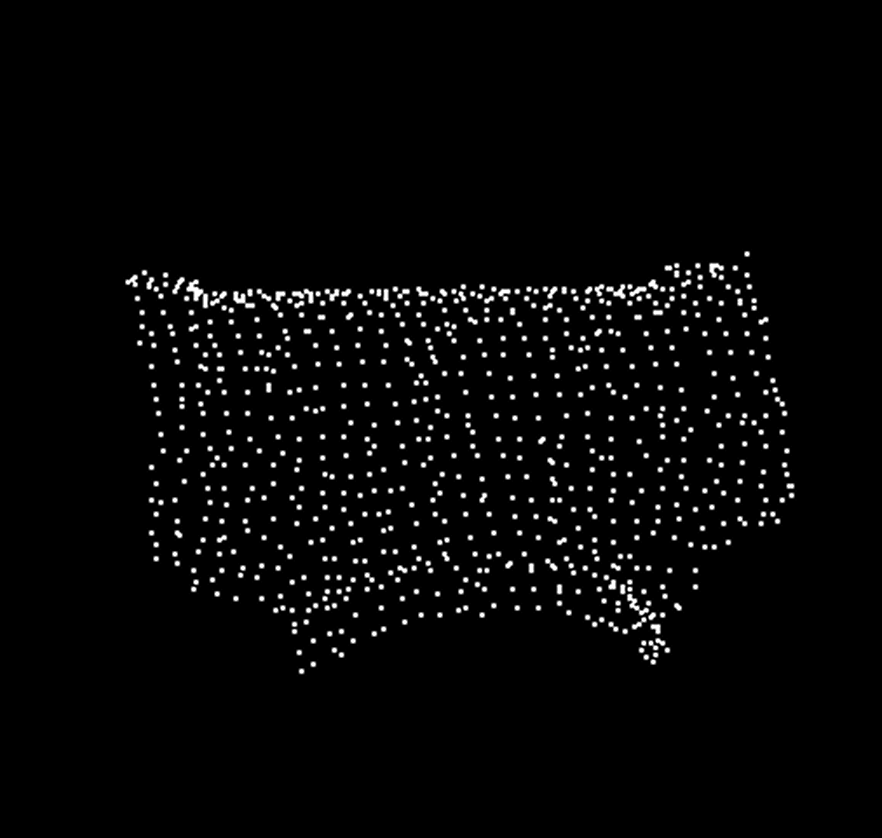
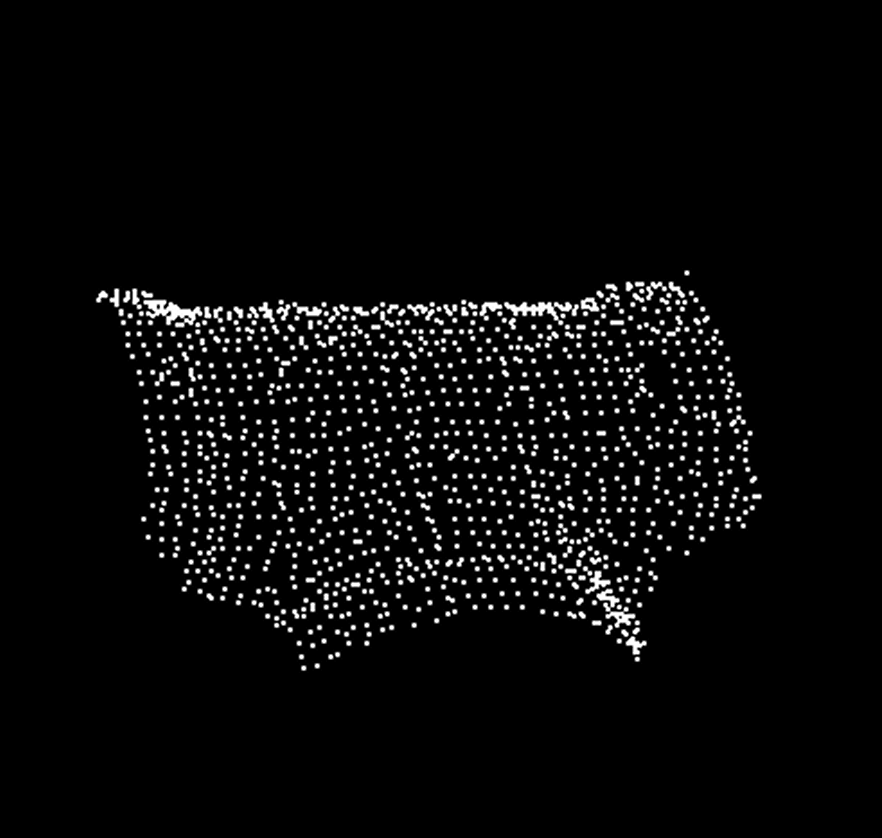
このパラメータは、マッチング計算に関与するポイントクラウドの数を処理するために使用されます。マッチングテンプレートとシーンポイントクラウドに対してダウンサンプリング処理(距離間隔 = テンプレートサイズ / 距離離散量)を実行します。距離離散量の値が大きいほど、マッチング計算に関与するポイントクラウドの数が多くなり、逆もまた同様です。 |
調整手順 |
デフォルト値で計算されたマッチング結果の位置偏差が比較的大きい場合は、このパラメータを適切に大きく調整できます。マッチング計算に関与する点の数を増やすと、マッチング精度が向上します。パラメータを大きくすると計算時間も長くなることに注意してください。デフォルト値での計算時間が長く、マッチング結果の位置偏差が小さい場合は、このパラメータを適切に小さく調整してサイクルタイムを改善できます。 |
効果 |
|
|
|
|
|
推奨値 |
生のポイントクラウド |
15 |
20 |
30 |
40 |
角度離散数量
デフォルト値 |
30 |
パラメータ範囲 |
1-500 |
パラメータ説明 |
このパラメータは、初期ポーズの角度値を量子化するために使用されます。つまり、連続的な角度値を間隔のある角度値に離散化します(角度間隔 = 360 / 角度離散数量)。この値が大きいほど、初期角度の精度が高くなり、逆もまた同様です。 |
調整手順 |
一般に、このパラメータは調整しません。マッチング結果の角度偏差が比較的大きい場合は、このパラメータを適切に大きく調整できます。 |
効果 |
|
|
推奨値 |
20 |
30 |
基準点ステップサイズ
デフォルト値 |
5 |
パラメータ範囲 |
1-50 |
推奨値 |
1、3、5、10 |
パラメータ説明 |
このパラメータは、マッチング計算の参照点を選択するために使用されます。つまり、数点ごとにポイントクラウドをマッチング点として選択して計算に参加させます。パラメータ値が大きいほど、マッチング計算に参加する点が少なくなり、逆もまた同様です。 |
調整手順 |
デフォルト値で計算されたマッチング結果の位置偏差が比較的大きい場合は、このパラメータ値を適切に小さく調整してマッチング計算の点を増やし、マッチング精度を向上させることができますが、計算時間も長くなります。 |
出力ポーズ数の上限
デフォルト値 |
100 |
パラメータ範囲 |
0-100000 |
推奨値 |
5、10、20、30、50 |
パラメータ説明 |
このパラメータは、単一のポイントクラウドで計算される初期ポーズの最大数を指します。複数のポイントクラウドが入力された場合、出力結果の上限は[入力ポイントクラウド数] * [出力ポーズ数の上限]のパラメータ値になります。 |
調整手順 |
入力ポイントクラウドの数が1(ポイントクラウドがクラスタセグメンテーション処理済み)の場合、実際のワーク数に応じて設定します。十分な正しい初期結果を保証するために、通常、パラメータ値はワーク数より少し大きく設定されます。入力ポイントクラウドの数が複数(ポイントクラウドがクラスタセグメンテーション済み)の場合、パラメータ値は1~5のいずれかに設定できます。 |
詳細パラメータ
クラスタリング角度のしきい値
デフォルト値 |
24 |
パラメータ範囲 |
0-360 |
推奨値 |
15、20、24、30 |
パラメータ説明 |
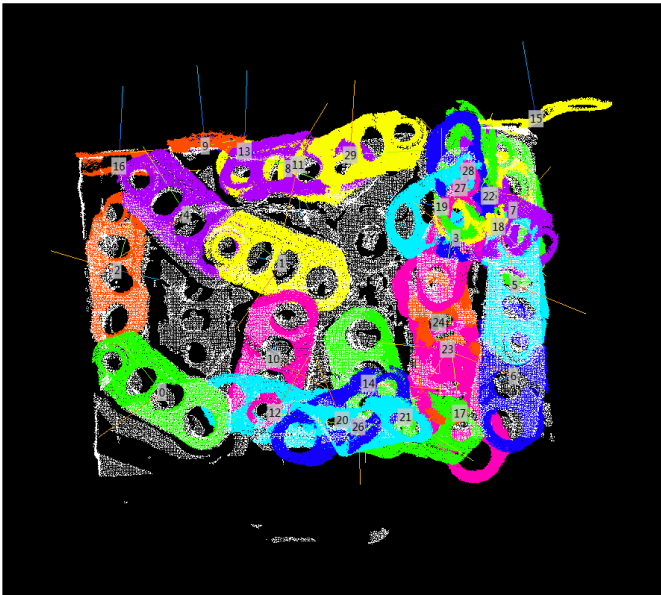
このパラメータは、投票に合格した初期ポーズが同じワークに属するかどうかを判断するために使用されます。初期ポーズ間の角度差がパラメータ値より小さい場合、同じワークに属すると見なされます。最終的に表示されるマッチング結果は、差分値がパラメータ範囲内にあるポーズの平均値です。 |
調整手順 |
一般に、このパラメータは調整しません。表示されるマッチング結果が少なく、角度偏差が比較的大きい場合は、このパラメータ値を適切に小さく調整してポーズ角度クラスタリング時の計算範囲を狭め、より多くの結果を出力し、マッチング精度を向上させることができますが、計算時間も長くなります。 |
クラスタリング距離の閾値
デフォルト値 |
6 |
パラメータ範囲 |
0-200 |
推奨値 |
3、6、10 |
パラメータ説明 |
このパラメータは、投票に合格した初期ポーズが同じワークに属するかどうかを判断するために使用されます。初期ポーズ間の距離差がパラメータ値より小さい場合、同じワークに属すると見なされます。最終的に表示されるマッチング結果は、差分値がパラメータ範囲内にある初期ポーズの平均値です。 |
調整手順 |
一般に、このパラメータは調整しません。表示されるマッチング結果が少なく、位置偏差が比較的大きい場合は、このパラメータ値を適切に小さく調整してポーズ位置クラスタリング時の計算範囲を狭め、より多くの結果を出力し、マッチング精度を向上させることができますが、計算時間も長くなります。 |
投票フィルターのしきい値
デフォルト値 |
0.5 |
パラメータ範囲 |
0-1 |
推奨値 |
0.1、0.3、0.5、0.8、1.0 |
パラメータ説明 |
このパラメータは、初期ポーズをフィルタリングするために使用されます。生成された初期ポーズはマッチング計算のラウンドを実行し、この値より大きい初期ポーズが保持されます。この値が高いほど、フィルタリングされる誤った結果が多くなり、マッチング結果がより正確になります。 |
調整手順 |
一般に、このパラメータは調整しません。表示されるマッチの数が比較的少ない場合は、この値を適切に小さく調整できます。比較的大きな偏差を持つ表示されるマッチの数が多い場合は、この値を適切に大きく調整できます。 |
モデル重複閾値
デフォルト値 |
0.1 |
パラメータ範囲 |
0.01-1000 |
推奨値 |
0.1、0.3、0.5、1.0 |
パラメータ説明 |
このパラメータは、重複するマッチング結果をフィルタリングするために使用されます。 |
調整手順 |
一般に、このパラメータは調整しません。1つのワークに対して複数のマッチング結果が表示される場合は、この値を適切に大きく調整して重複するマッチング結果をフィルタリングできます。 |
点マッチング検索範囲
デフォルト値 |
5 |
パラメータ範囲 |
0-20 |
推奨値 |
1、3、5、10 |
パラメータ説明 |
このパラメーターは、テンプレートポイントクラウドとシーンポイントクラウドが一致するかどうかの計算範囲を指定し、マッチング結果の並べ替えに使用されます。 |
調整手順 |
一般に、このパラメータは調整しません。シーンポイントクラウドのゆらぎが大きい場合、正しいマッチング結果が占めるボクセルが少なくなるため、このパラメーターを適切に大きくすることで、正しいマッチング結果が占めるボクセル数を増やすことができます(誤ったマッチング結果は偏差が大きいため、占有ボクセル数の増加は少なくなります)。逆に、シーンポイントクラウドが比較的小さい場合は、このパラメーターを適切に小さくすることで、誤った結果が占めるボクセル数を減らし、正しい結果を上位に表示できます。 |
パラメータ調整経験共有
3D粗マッチング計算精度の向上方法
マッチング計算時間と精度は反比例の関係にあり、マッチング精度を向上させると計算時間が増加します。「3 Dラフマッチ」は概算のポーズのみを計算し、その後「3 D精密マッチング」オペレータがあるため、「3 Dラフマッチ」の計算精度はそれほど高くなくてもよく、精度とサイクルタイムを総合的に考慮する必要があります。マッチング精度に主に影響を与えるパラメータは、「距離離散量」と「基準点ステップサイズ」であり、次に「クラスタリング角度のしきい値」と「クラスタリング距離の閾値」パラメータです。
-
まず、「距離離散量」を大きくするか、「基準点ステップサイズ」パラメータを小さくしてみてください。これにより、計算時間があまり増加せずに精度が向上します。
-
これで満足できない場合は、同時に「距離離散量」を大きくし、「基準点ステップサイズ」パラメータを小さくします。パラメータ値を調整する際には、計算時間も考慮してください。
-
それでも満足できない場合は、「クラスタリング角度のしきい値」と「クラスタリング距離の閾値」パラメータを小さくしてみてください。