3D精マッチング
パラメータ説明
パラメータ設定
モデル点群ファイル
||=== || パラメータ説明 | このパラメータはマッピングパラメータを通じてマッチングモデルライブラリ内の点群テンプレートを選択するか、ワークテンプレート点群ファイルを直接アップロードできます。アップロード後の点群ファイルもダウンロード可能です ||モデル切り替え方法 |ファイルアップロード をクリックしてウィンドウを開き、点群ファイルを直接アップロードするか、マッピングパラメータを通じて切り替えます ||===
ボクセルダウンサンプリングサイズ
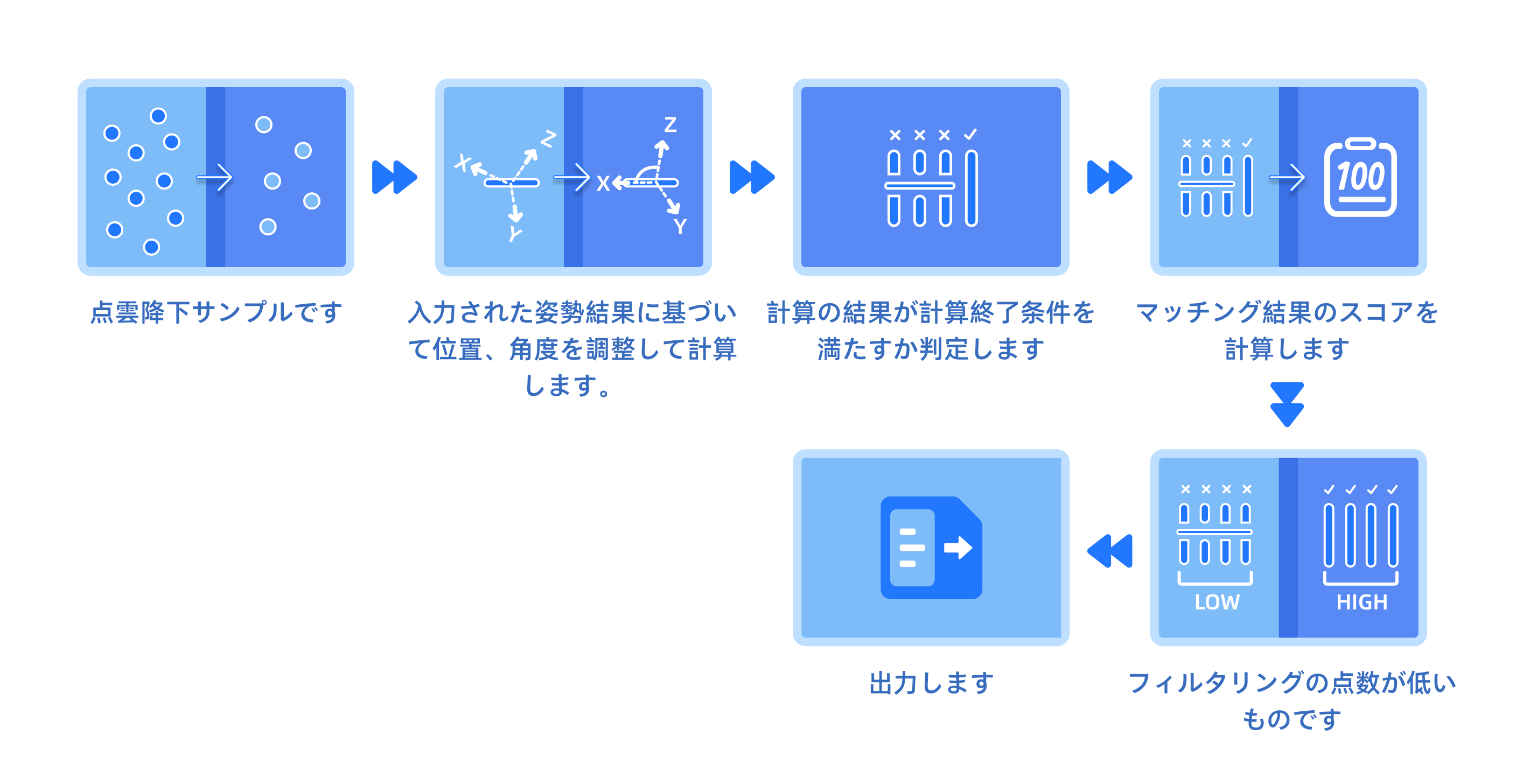
||=== || デフォルト値 | 5 || パラメータ範囲 | 0-100000 || 推奨値 | 1、2、3、5、10 || パラメータ説明 | このパラメータは隣接する2つのボクセル点の間隔を指し、マッチング計算に参加するテンプレート点群とシーン点群をダウンサンプリング処理します。値が小さいほど計算に参加する点群数が多く、マッチング精度が高くなります || 調整説明 | デフォルト値で計算したマッチング結果の偏差が大きい場合は、適度にこのパラメータを小さくできます。計算時間が長い場合は、適度にこのパラメータを大きくできます ||===
信頼閾値
||=== || デフォルト値 | 0.5 || パラメータ範囲 | 0-1 || 推奨値 | 0.3、0.5、0.6、0.8、0.9 || パラメータ説明 | このパラメータはマッチングスコアが低い結果をフィルタリングするために使用します || 調整説明 | デフォルト値でフィルタリング後のマッチング結果が少ない場合は、適度にこのパラメータを小さくできます。結果にマッチング偏差が大きいものがある場合は、適度にこのパラメータを大きくできます ||===
ICP検索半径
||=== || デフォルト値 | 100 || パラメータ範囲 | 0-100000 || 推奨値 | 20、30、50、100 || パラメータ説明 | このパラメータはマッチング計算時の検索点の距離を指します || 調整説明 | このパラメータはワークサイズに応じて設定し、一般的にワーク直径の0.1倍〜1倍の範囲です。ワークサイズが小さいか粗マッチング出力結果の偏差が大きくない場合は適度に小さくできます。ワークサイズが大きく粗マッチング出力結果の偏差も大きい場合は、適度にこのパラメータを大きくできます ||===
ICPスコア有効距離
||=== || デフォルト値 | 5 || パラメータ範囲 | 0-100000 || 推奨値 | 1、3、5、10 || パラメータ説明 | このパラメータは点群テンプレート内の特定の点とシーン内の点が対応するかどうかの検索範囲を指します。このパラメータ範囲内で、シーン内でテンプレート内の特定の点に対応する点が見つかった場合、その対応点は有効点と呼ばれ、有効点が多いほどマッチングスコアが高くなります || 調整説明 | このパラメータ値は ボクセルダウンサンプリングサイズ パラメータ値より大きくする必要があり、パラメータ値が大きいほどマッチングスコアが高くなります。一般的に調整は不要です。ボクセルダウンサンプリングサイズ パラメータが小さい場合(例:1)、正しいマッチング結果スコアと誤ったマッチング結果スコアの差が小さく、誤った結果をフィルタリングできない場合は、適度にこのパラメータを小さくしてマッチングスコア差を広げ(誤った結果のスコアがより多く低下)、誤った結果をフィルタリングできます ||===
重複排除を有効化
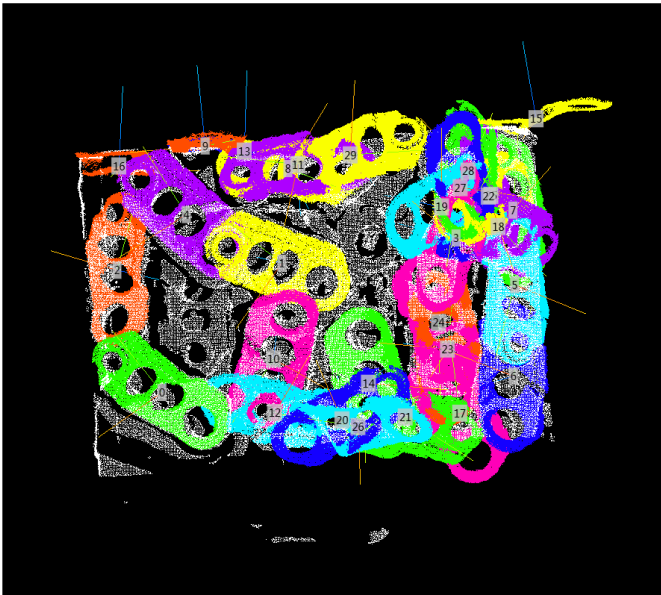
||=== || デフォルト値 | デフォルト有効 || 推奨値 | なし || パラメータ説明 | このパラメータは1つのワークが複数の結果にマッチングした場合を処理するために使用し、マッチングスコアに基づいてスコアが低い結果を除去し、スコアが高い結果のみを保持します || 調整説明 | デフォルト有効で、一般的にこのパラメータを調整する必要はありません ||===
クラスタリング位姿を利用
||=== || デフォルト値 | デフォルト有効 || 推奨値 | なし || パラメータ説明 | このパラメータは1つのシーン点群を複数のブロック点群に分割した後、各ブロック点群が個別にマッチング計算を行うことを指し、ワーク外点群の干渉を効果的に減らし、精度と計算時間の両方を向上させます || 調整説明 | デフォルト有効で、一般的にこのパラメータを調整する必要はありません ||===
座標系原点を移動
||=== || デフォルト | デフォルト無効 || 推奨値 | なし || パラメータ説明 | このパラメータは点群座標系をテンプレート点群幾何中心の位置に移動することを指します || 調整説明 | 3D精マッチング オペレーターに入力される位姿が 点群中心位姿抽出 によって計算され、テンプレート作成時に 点群中心整列 操作を行わなかった場合、この時マッチング計算を行うにはこのパラメータを有効にする必要があります ||===
高度パラメータ
ICP早期終了距離条件
||=== || デフォルト値 | 0.1 || パラメータ範囲 | 0-1000 || 推奨値 | 0.1、0.2、0.3 || パラメータ説明 | このパラメータはマッチング計算を早期に終了するかどうかを判断するために使用し、値が小さいほどマッチング距離偏差が小さくなります。ワークテンプレート座標とマッチング結果位姿の距離がこの値より小さく、回転精度も満たす場合、アルゴリズムは距離精度要件を満たすと判断し、マッチング計算を早期に終了します || 調整説明 | 一般的にこのパラメータを調整する必要はありません。マッチング平行移動距離偏差が大きい場合は適度に小さくできます。計算時間が長い場合は適度にこのパラメータを大きくできます ||===
ICP早期終了回転条件
||=== || デフォルト値 | 0.1 || パラメータ範囲 | 0-10 || 推奨値 | 0.1、0.2、0.3 || パラメータ説明 | このパラメータはマッチング計算を早期に終了するかどうかを判断するために使用し、値が小さいほどマッチング回転偏差が小さくなります。ワークテンプレート座標とマッチング結果のピック位姿の回転角度差がこの値より小さく、距離精度も満たす場合、アルゴリズムは回転精度要件を満たすと判断し、マッチング計算を早期に終了します || 調整説明 | 一般的にこのパラメータを調整する必要はありません。マッチング回転偏差が大きい場合は適度に小さくできます。計算時間が長い場合は適度にこのパラメータを大きくできます ||===
ICP最大反復回数
||=== || デフォルト値 | 20 || パラメータ範囲 | 0-500 || 推奨値 | 20、30、50、100 || パラメータ説明 | このパラメータは精マッチング計算の最大回数を指し、精マッチング計算回数がこの値に達し、早期終了条件に達しない場合も計算を停止します。精マッチング計算が早期終了条件を満たす場合も計算を停止し、この時の計算回数はこの値より小さくなります || 調整説明 | マッチング偏差が大きい場合は適度にこのパラメータを大きくし、マッチング計算回数を増やして精度を向上させることができます。計算時間が長い場合は適度にこのパラメータを小さくできます ||===
調整経験の共有
3D精マッチング計算精度の向上方法
3D精マッチング は最終の計算結果出力として、その計算精度はピック精度に直接影響するため、 3D精マッチング の計算精度は非常に重要です。 3D精マッチング オペレーターのマッチング精度に影響する主なパラメータは ボクセルダウンサンプリングサイズ 、 ICP検索半径 で、次に ICP最大反復回数 です
-
ボクセルダウンサンプリングサイズ はマッチング精度に直接影響するため、まずこのパラメータ値を小さくしてマッチング精度を向上させることを試します;
-
マッチング効果が良くない場合は、 ICP検索半径 パラメータを調整し、小さなワーク(例:ワークサイズ100mm)は小さく、大きなワーク(例:ワークサイズ1000mm)は大きく調整します;
-
上記2つのパラメータを調整しても効果が良くない場合は、高度パラメータを開き、 ICP最大反復回数 を大きく調整します;
-
単一の精マッチング調整だけではマッチング精度を満たせない場合は、 3D精マッチング オペレーターを追加し、前の精マッチング結果でさらに高精度なマッチング計算を行うことができます(複数の精マッチングを追加可能)
誤ったマッチング結果のフィルタリング方法
マッチング結果は 信頼閾値 パラメータでフィルタリングされ、マッチングスコアの高低は ICPスコア有効距離 と直接関係があります。正しい結果を保持したい場合は、 信頼閾値 と ICPスコア有効距離 パラメータ値を調整します
-
直接 信頼閾値 を調整し、現在のマッチング結果のスコアを確認する必要があります。閾値は誤った結果のマッチングスコアより10%〜20%大きくする必要があります;
-
マッチングの正しい結果と誤った結果のスコア差が大きくない場合は、 ICPスコア有効距離 を小さく調整し、現在のマッチングスコアに応じて適度に 信頼閾値 パラメータを小さく調整します。マッチングの正しい結果スコアが低い場合は、 ICPスコア有効距離 を大きく調整し、現在のマッチングスコアに応じて適度に 信頼閾値 パラメータを大きく調整します