🔷ピック物位姿調整
機能説明
このオペレーターは、入力された位姿リストに対して並進および/または回転調整を行うために使用され、2つの調整方法を提供します:
-
並進回転変換 : リスト内の各位姿に対して、固定の並進(X, Y, Z オフセット)と回転(X, Y, Z軸周りの指定角度回転)を1回適用します。この変換は、ワールド座標系または位姿自身のローカル座標系に基づいて実行できます。各入力位姿から調整後の出力位姿を1つ生成します。
-
位姿ミラーリング : リスト内の各位姿に対して、まず基本的な並進オフセットを適用し、次にユーザー設定の対称パラメータ(X, Y, Z軸周りの指定角度範囲内で複数の離散角度を生成)に基づいて、対称回転関係を持つ複数の新しい位姿を生成します。この方法では、各入力位姿に対して複数の出力位姿が生成され、「ピック点生成(パラメータ生成)」オペレーターの対称機能に類似しています。
使用シーン
-
ピック点微調整 : 初期ピック位姿を計算した後、必要に応じて微細な位置調整(例:Z値の上昇)や姿勢調整(例:Z軸角度の回転)を行います。
-
座標系キャリブレーション : 位姿に対して手動の座標系補償並進や回転を実行します。
-
対称ピック点生成 : 対称性を持つ物体やピック戦略に対して、「位姿ミラーリング」方法で複数の等価または対称なピック位姿を迅速に生成します。
-
異なる姿勢のテスト : 基本位姿から一連の異なる回転角度の位姿を生成し、テストや計画に使用します。
入力・出力
入力項目 |
ピック物姿勢情報: 入力する位姿リスト。 描画シーン: シーン点群。主に可視化インターフェースで調整後の位姿を重ね合わせ表示するために使用され、計算に直接関与しません。 |
|
出力項目 |
ピック物姿勢情報: 調整またはミラーリング生成後の位姿リスト。「並進回転変換」を使用する場合、出力リスト長は入力と同じです;「位姿ミラーリング」を使用する場合、出力リスト長は通常入力の倍数になります。 |
|
パラメータ説明
|
座標系
パラメータ説明 |
後続の並進と回転操作がどの座標系に基づいて実行されるかを選択します。 |
調整説明 |
注意 :並進と回転を異なる座標系に基づいて実行する必要がある場合、このノードを2つ直列接続できます。 |
調整方法
パラメータ説明 |
位姿調整のコア方法を選択します。異なる方法は異なる後続パラメータに対応します。 |
調整説明 |
|
X/Y/Z軸並進重ね合わせ
パラメータ説明 |
選択した座標系下で、X、Y、Z軸方向にそれぞれ適用する並進量。「並進回転変換」方法では、これが主要な並進操作です;「位姿ミラーリング」方法では、これが対称回転前に適用される基本オフセットです。 |
調整説明 |
位姿を移動させたい距離を設定します。正値は軸正方向への移動、負値は負方向への移動を表します。 |
パラメータ範囲 |
[-10000, 10000]、デフォルト値:0、単位:mm |
|
|
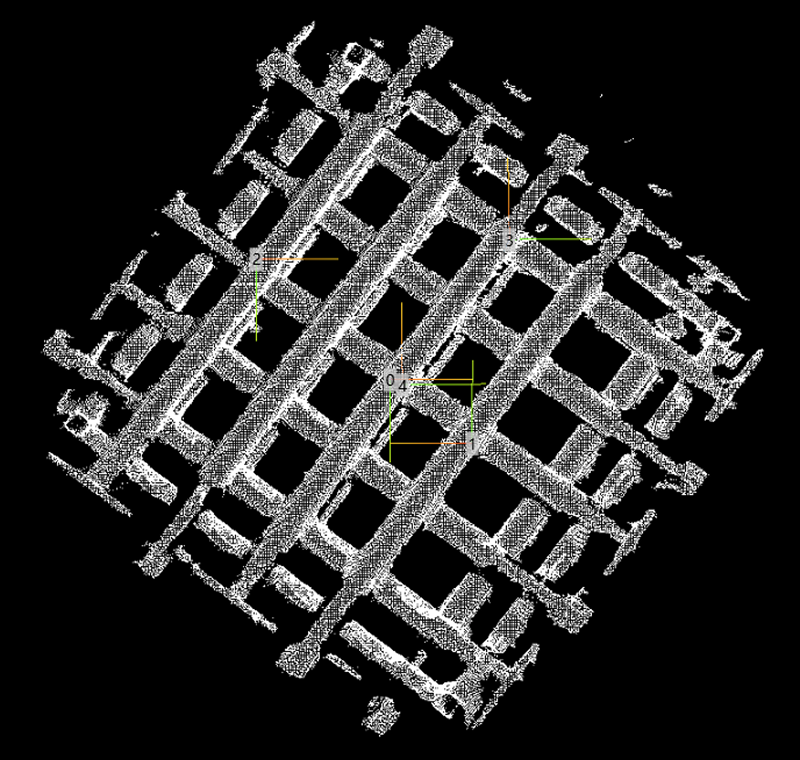
|
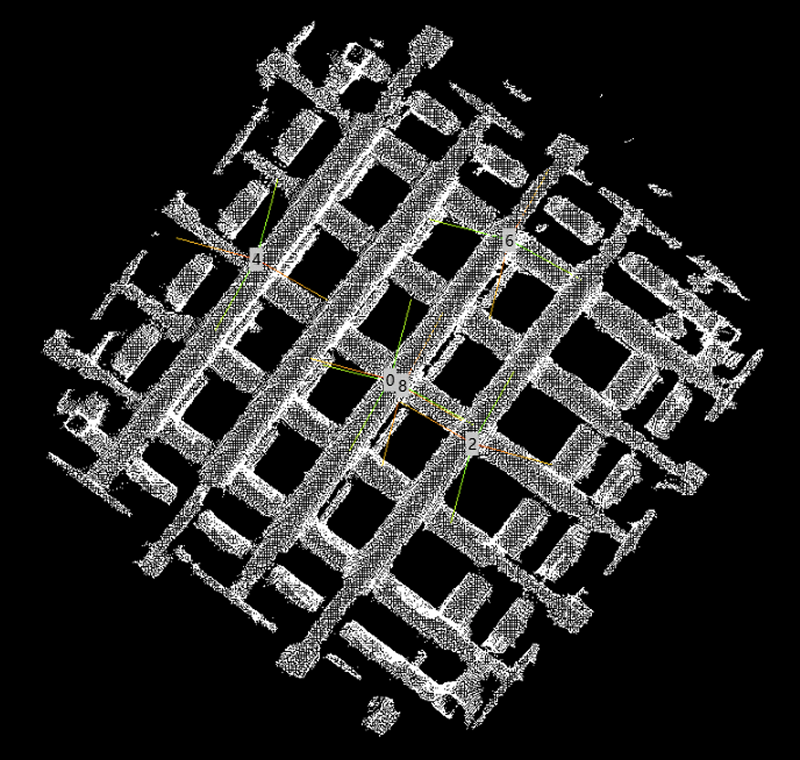
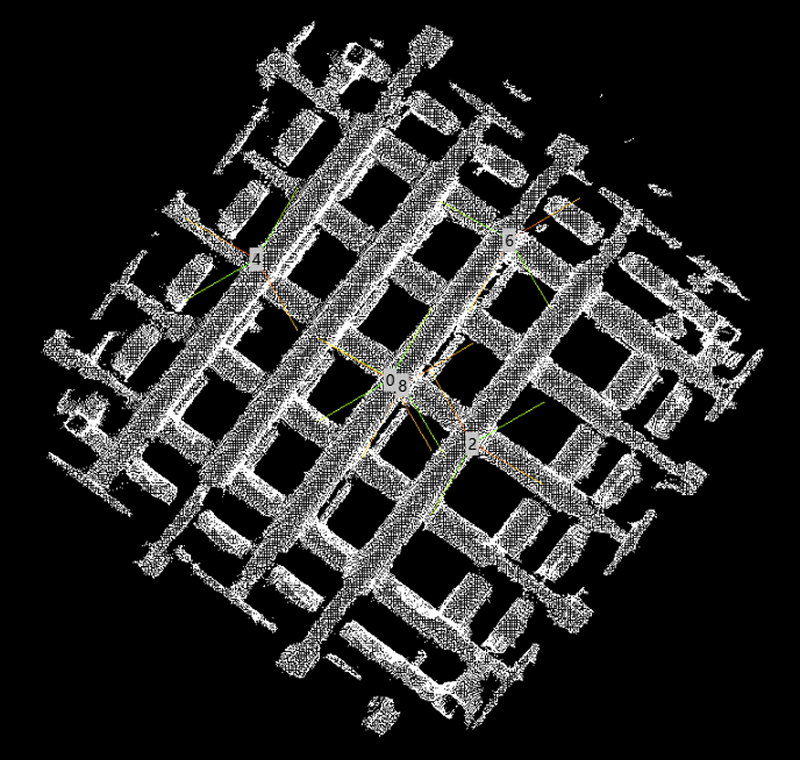
X軸並進重ね合わせ=-100mm |
X軸並進重ね合わせ=0mm |
X軸並進重ね合わせ=100mm |
X/Y/Z軸周り回転
パラメータ説明 |
調整方法が「並進回転変換」に設定されている場合のみ有効。選択した座標系下で、X、Y、Z軸周りにそれぞれ適用する回転角度。 |
調整説明 |
位姿に追加で回転させたい角度を設定します。回転順序は通常、先にX、次にY、最後にZです。 |
パラメータ範囲 |
[0, 360]、デフォルト値:0、単位:度 |
|
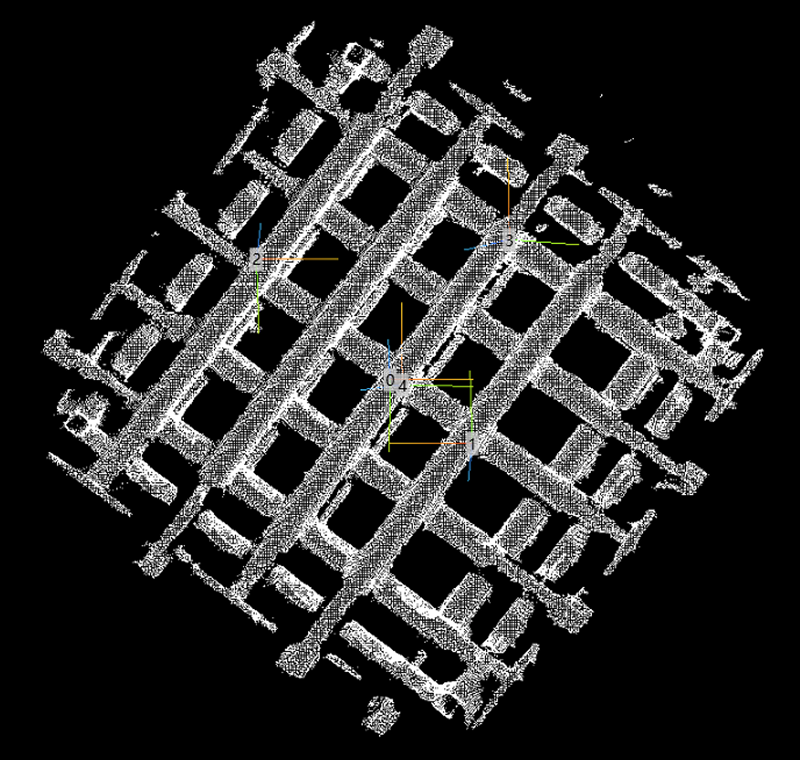
|
|
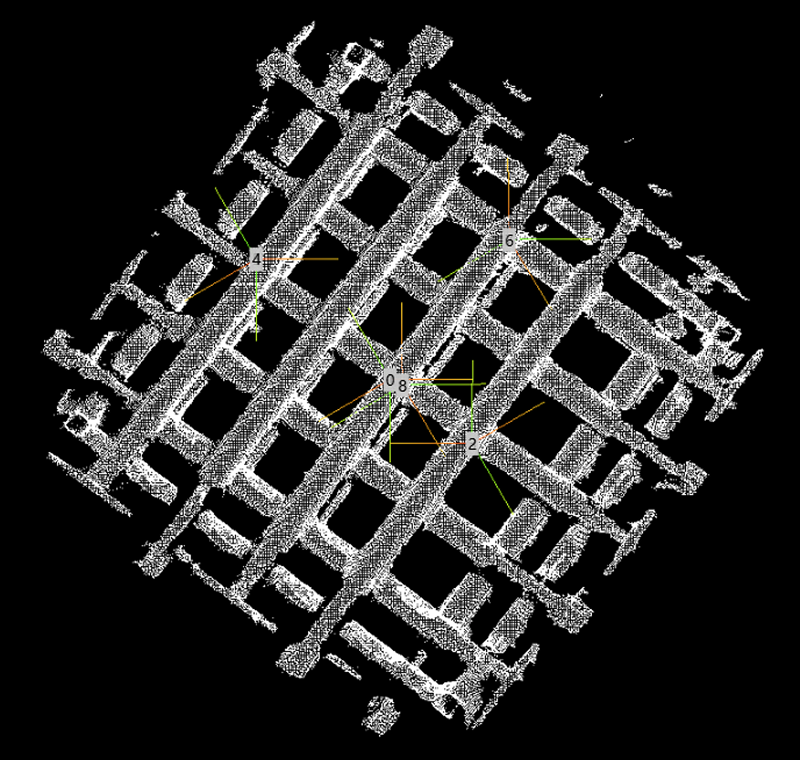
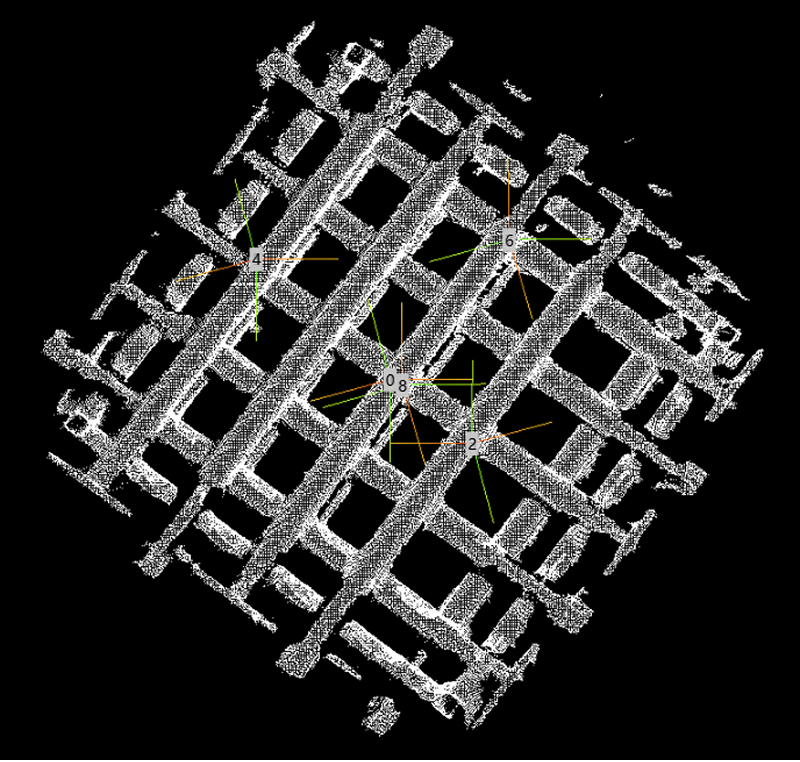
X軸周り回転=0度 |
X軸周り回転=30度 |
X軸周り回転=60度 |
X/Y/Z軸沿い対称(角度離散数目)
パラメータ説明 |
調整方法が「位姿ミラーリング」に設定されている場合のみ有効。位姿自身のX、Y、Z軸周りで対称ピック点を生成するかどうか、およびその方法を設定します。数値は、その軸の対称回転で生成する必要のある離散角度の数量を表します。 |
調整説明 |
|
パラメータ範囲 |
[0, 360]、デフォルト値:0、単位:度 |
|
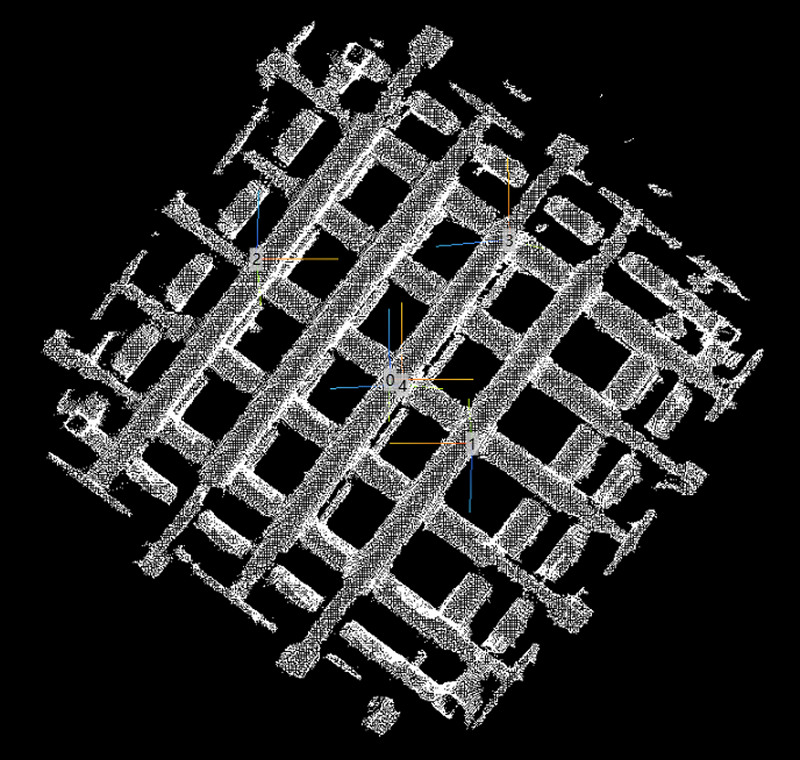
|
|
X軸沿い対称=0度 |
X軸沿い対称=10度 |
X軸沿い対称=30度 |
最小角度
パラメータ説明 |
調整方法が「位姿ミラーリング」に設定されている場合のみ有効。軸対称生成を有効にした場合、生成される対称位姿の開始回転角度。 |
調整説明 |
対称生成の角度範囲の下限を定義します。 |
パラメータ範囲 |
[0, 360.1]、デフォルト値:0、単位:度 |
|
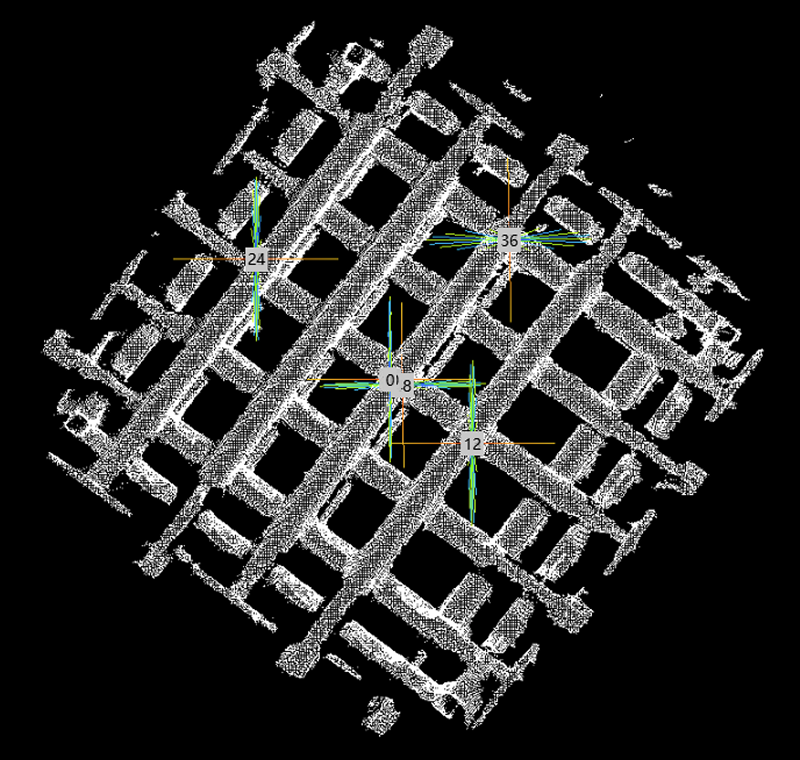
|
|
最小角度=0度 |
最小角度=30度 |
最小角度=60度 |