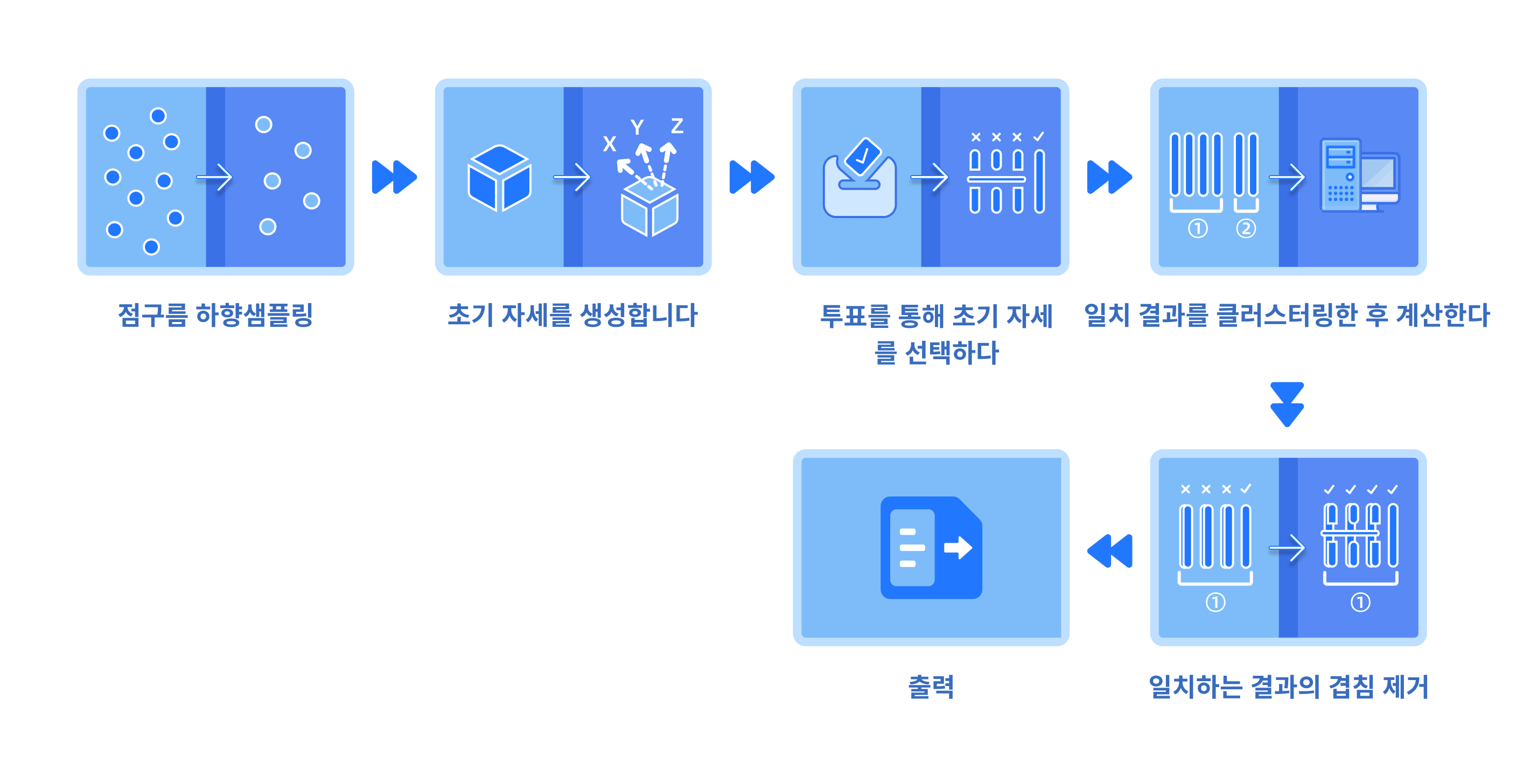
3D 러프 매치
매개변수 설명
매개변수 설정
모델 포인트 클라우드 파일
매개변수 설명 |
이 매개변수는 매핑 매개변수를 통해 매칭 모델 라이브러리에서 포인트 클라우드 템플릿을 선택하거나 공작물 템플릿 포인트 클라우드 파일을 직접 업로드할 수 있습니다. 업로드된 포인트 클라우드 파일도 다운로드할 수 있습니다. |
모델 전환 방법 |
[파일 업로드]를 클릭하여 팝업 창을 열고 포인트 클라우드 파일을 선택하여 직접 업로드하거나 매핑 매개변수를 통해 전환합니다. |
이산 거리 수량
기본값 |
20 |
매개변수 범위 |
2-500 |
매개변수 설명 |
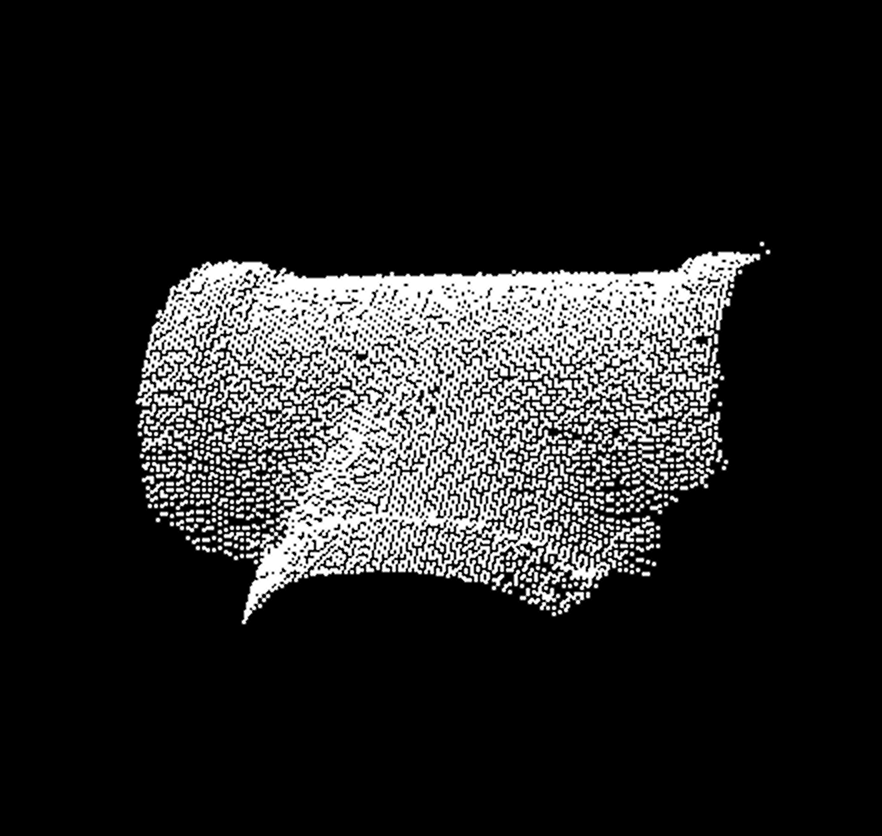
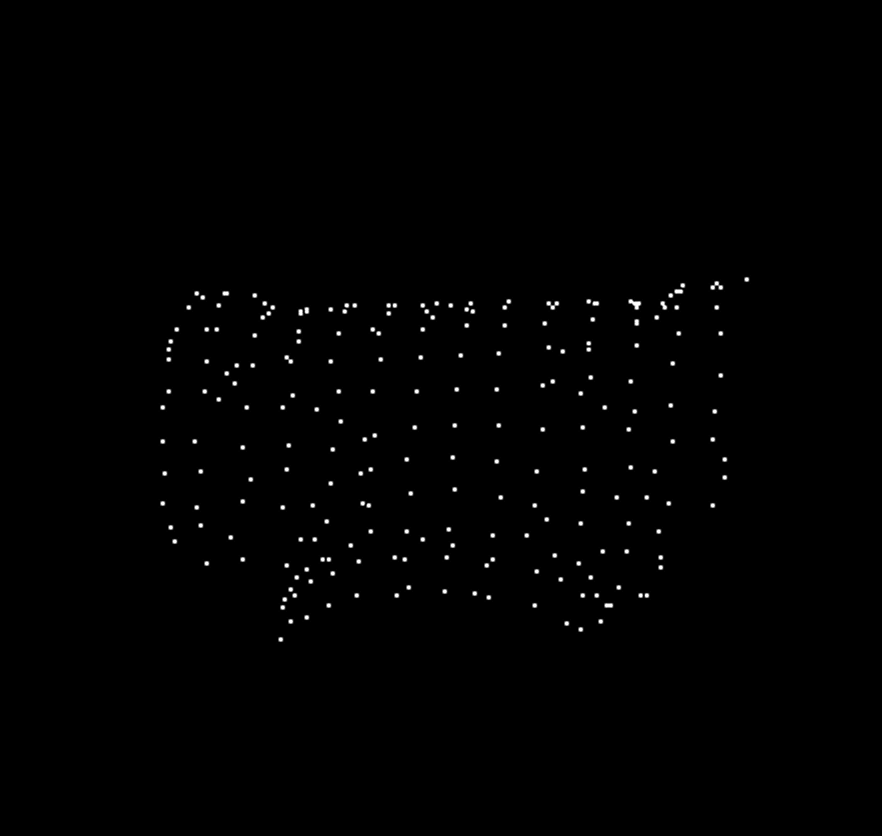
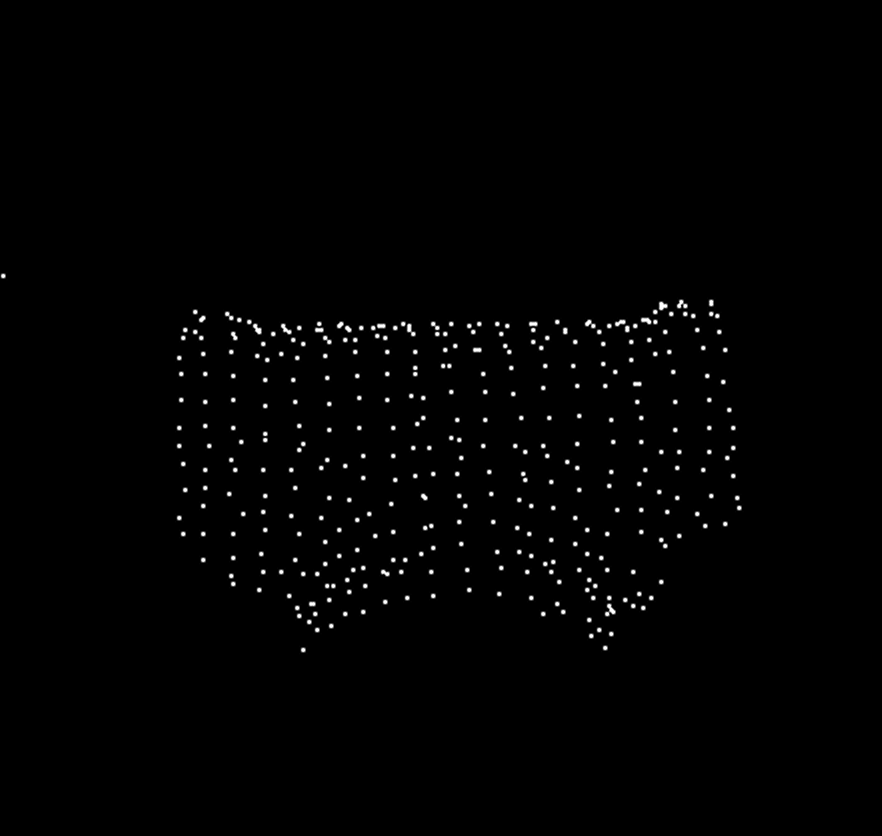
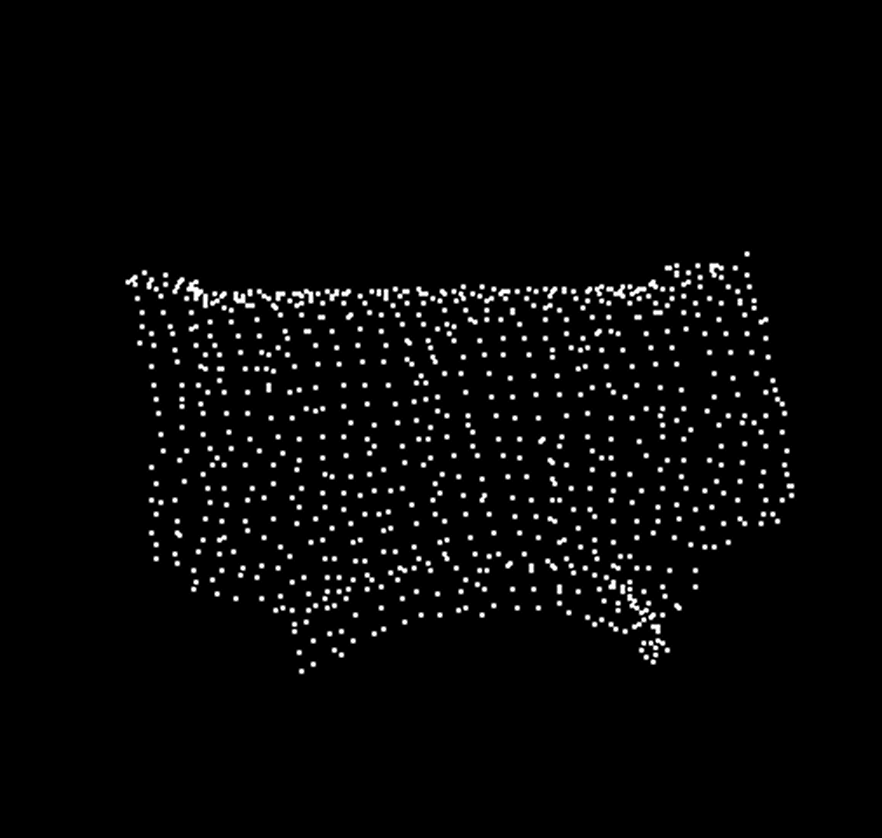
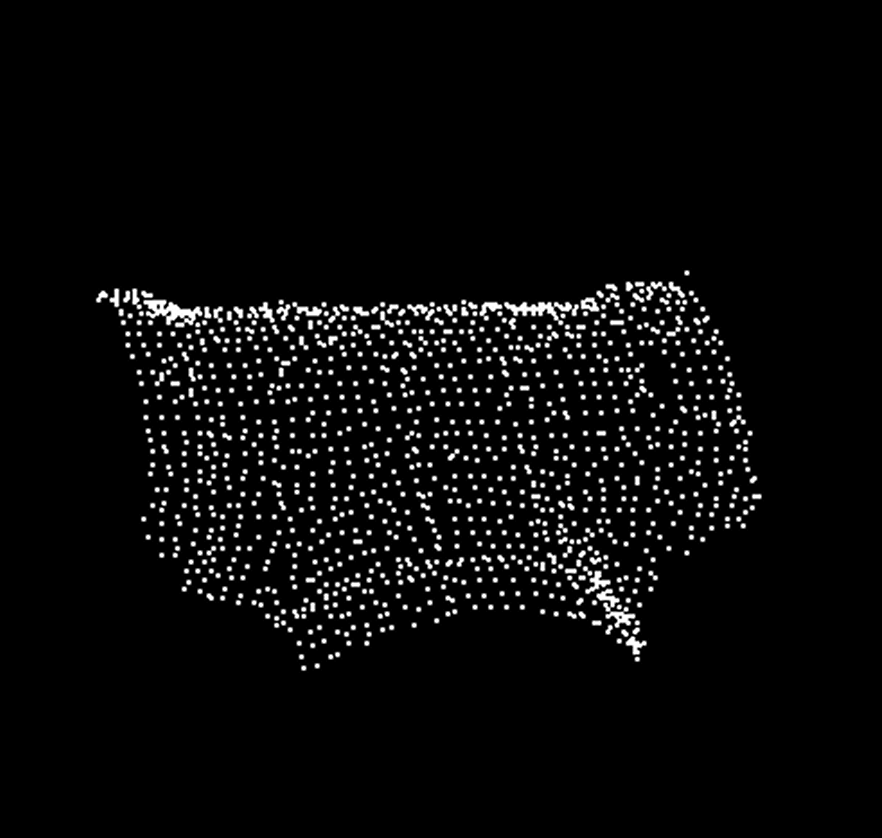
이 매개변수는 매칭 계산에 관련된 포인트 클라우드의 수를 처리하는 데 사용됩니다. 매칭 템플릿과 장면 포인트 클라우드에 대해 다운샘플링을 수행합니다(거리 간격 = 템플릿 크기 / 이산 거리 수량). 이산 거리 수량이 클수록 매칭 계산에 더 많은 포인트 클라우드가 참여하고 그 반대의 경우도 마찬가지입니다. |
튜닝 지침 |
기본값으로 계산된 매칭 결과의 위치 편차가 비교적 큰 경우 이 매개변수를 적절히 늘릴 수 있습니다. 매칭 계산에 관련된 포인트 수를 늘리면 매칭 정확도를 향상시킬 수 있습니다. 매개변수를 늘리면 계산 시간도 증가한다는 점에 유의하십시오. 기본값으로 계산 시간이 길고 매칭 결과의 위치 편차가 작은 경우 이 매개변수를 적절히 줄여 사이클 시간을 향상시킬 수 있습니다. |
효과 |
|
|
|
|
|
권장 값 |
원시 포인트 클라우드 |
15 |
20 |
30 |
40 |
각도 이산 수량
기본값 |
30 |
매개변수 범위 |
1-500 |
매개변수 설명 |
이 매개변수는 초기 포즈의 각도 값을 양자화하는 데 사용됩니다. 즉, 연속적인 각도 값을 간격이 있는 각도 값으로 이산화합니다(각도 간격 = 360 / 각도 이산 수량). 이 값이 클수록 초기 각도 정확도가 높아지고 그 반대의 경우도 마찬가지입니다. |
튜닝 지침 |
일반적으로 이 매개변수는 조정되지 않습니다. 매칭 결과의 각도 편차가 비교적 큰 경우 이 매개변수를 적절히 늘릴 수 있습니다. |
효과 |
|
|
권장 값 |
20 |
30 |
기준점 스텝 크기
기본값 |
5 |
매개변수 범위 |
1-50 |
권장 값 |
1, 3, 5, 10 |
매개변수 설명 |
이 매개변수는 매칭 계산을 위한 참조점을 선택하는 데 사용됩니다. 즉, 몇 점마다 포인트 클라우드를 매칭점으로 선택하여 계산에 참여시킵니다. 매개변수 값이 클수록 매칭 계산에 참여하는 점이 적어지고 그 반대의 경우도 마찬가지입니다. |
튜닝 지침 |
기본값으로 계산된 매칭 결과의 위치 편차가 비교적 큰 경우 이 매개변수 값을 적절히 줄여 매칭 계산을 위한 점 수를 늘리고 매칭 정확도를 향상시킬 수 있지만 계산 시간도 증가합니다. |
출력 포즈 수의 상한
기본값 |
100 |
매개변수 범위 |
0-100000 |
권장 값 |
5, 10, 20, 30, 50 |
매개변수 설명 |
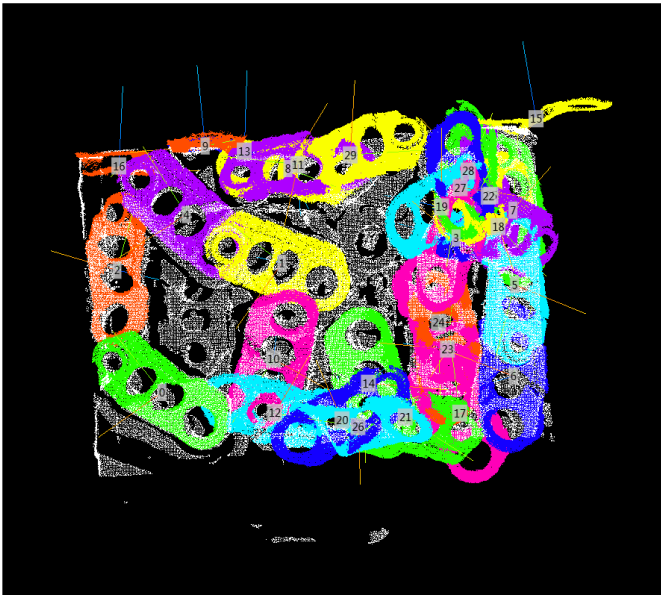
이 매개변수는 단일 포인트 클라우드에 대해 계산된 초기 포즈의 최대 수를 나타냅니다. 여러 포인트 클라우드가 입력되면 출력 결과의 상한은 [입력 포인트 클라우드 수] * [출력 포즈 수의 상한]의 매개변수 값입니다. |
튜닝 지침 |
입력 포인트 클라우드 수가 1인 경우(포인트 클라우드가 클러스터 분할 처리됨) 실제 공작물 수에 따라 설정합니다. 충분히 정확한 초기 결과를 보장하기 위해 일반적으로 매개변수 값은 공작물 수보다 약간 크게 설정됩니다. 입력 포인트 클라우드 수가 여러 개인 경우(포인트 클라우드가 클러스터 분할됨) 매개변수 값은 1~5로 설정할 수 있습니다. |
고급 매개변수
클러스터링 각도 임계값
기본값 |
24 |
매개변수 범위 |
0-360 |
권장 값 |
15, 20, 24, 30 |
매개변수 설명 |
이 매개변수는 투표를 통과한 초기 포즈가 동일한 공작물에 속하는지 여부를 결정하는 데 사용됩니다. 초기 포즈 간의 각도 차이가 매개변수 값보다 작으면 동일한 공작물에 속하는 것으로 간주됩니다. 최종적으로 표시되는 매칭 결과는 차이 값이 매개변수 범위 내에 있는 포즈의 평균입니다. |
튜닝 지침 |
일반적으로 이 매개변수는 조정되지 않습니다. 표시되는 매칭 결과가 적고 각도 편차가 비교적 큰 경우 이 매개변수 값을 적절히 줄여 포즈 각도 클러스터링 시 계산 범위를 좁히고 더 많은 결과를 출력하여 매칭 정확도를 향상시킬 수 있지만 계산 시간도 증가합니다. |
클러스터링 거리 임계값
기본값 |
6 |
매개변수 범위 |
0-200 |
권장 값 |
3, 6, 10 |
매개변수 설명 |
이 매개변수는 투표를 통과한 초기 포즈가 동일한 공작물에 속하는지 여부를 결정하는 데 사용됩니다. 초기 포즈 간의 거리 차이가 매개변수 값보다 작으면 동일한 공작물에 속하는 것으로 간주됩니다. 최종적으로 표시되는 매칭 결과는 차이 값이 매개변수 범위 내에 있는 초기 포즈의 평균입니다. |
튜닝 지침 |
일반적으로 이 매개변수는 조정되지 않습니다. 표시되는 매칭 결과가 적고 위치 편차가 비교적 큰 경우 이 매개변수 값을 적절히 줄여 포즈 위치 클러스터링 시 계산 범위를 좁히고 더 많은 결과를 출력하여 매칭 정확도를 향상시킬 수 있지만 계산 시간도 증가합니다. |
투표 필터 임계값
기본값 |
0.5 |
매개변수 범위 |
0-1 |
권장 값 |
0.1, 0.3, 0.5, 0.8, 1.0 |
매개변수 설명 |
이 매개변수는 초기 포즈를 필터링하는 데 사용됩니다. 생성된 초기 포즈는 매칭 계산 라운드를 거치며 이 값보다 큰 초기 포즈가 유지됩니다. 이 값이 높을수록 잘못된 결과가 더 많이 필터링되고 매칭 결과가 더 정확해집니다. |
튜닝 지침 |
일반적으로 이 매개변수는 조정되지 않습니다. 표시되는 일치 항목 수가 비교적 적은 경우 이 값을 적절히 줄일 수 있습니다. 비교적 큰 편차가 있는 표시되는 일치 항목이 많은 경우 이 값을 적절히 늘릴 수 있습니다. |
모델 중복 임계값
기본값 |
0.1 |
매개변수 범위 |
0.01-1000 |
권장 값 |
0.1, 0.3, 0.5, 1.0 |
매개변수 설명 |
이 매개변수는 중복되는 매칭 결과를 필터링하는 데 사용됩니다. |
튜닝 지침 |
일반적으로 이 매개변수는 조정되지 않습니다. 하나의 공작물에 대해 여러 매칭 결과가 나타나면 이 값을 적절히 늘려 중복되는 매칭 결과를 필터링할 수 있습니다. |
점 매칭 검색 범위
기본값 |
5 |
매개변수 범위 |
0-20 |
권장 값 |
1, 3, 5, 10 |
매개변수 설명 |
이 매개변수는 템플릿 포인트 클라우드와 장면 포인트 클라우드가 일치하는지 여부를 계산하는 범위를 지정하며, 매칭 결과를 정렬하는 데 사용됩니다. |
튜닝 지침 |
일반적으로 이 매개변수는 조정되지 않습니다. 장면 포인트 클라우드의 변동이 크면 올바른 매칭 결과가 차지하는 voxel이 적어지므로, 이 매개변수를 적절히 늘려 올바른 매칭 결과가 차지하는 voxel 수를 늘릴 수 있습니다(잘못된 매칭 결과는 편차가 크기 때문에 차지하는 voxel 수 증가가 적음). 반대로 장면 포인트 클라우드가 상대적으로 작은 경우 이 매개변수를 적절히 줄여 잘못된 결과가 차지하는 voxel 수를 줄이고 올바른 결과를 상위에 표시할 수 있습니다. |
매개변수 튜닝 경험 공유
3D 러프 매칭 계산 정확도 향상 방법
매칭 계산 시간과 정확도는 반비례 관계이며, 매칭 정확도를 높이면 계산 시간이 증가합니다. "3D 러프 매치"는 대략적인 포즈만 계산하고 이후에 "3D 정밀 매칭" 연산자가 있으므로 "3D 러프 매치"의 계산 정확도는 매우 높을 필요는 없으며 정확도와 사이클 시간을 종합적으로 고려해야 합니다. 매칭 정확도에 주로 영향을 미치는 매개변수는 "이산 거리 수량"과 "기준점 스텝 크기"이며 그 다음으로 "클러스터링 각도 임계값"과 "클러스터링 거리 임계값" 매개변수입니다.
-
먼저 "이산 거리 수량"을 늘리거나 "기준점 스텝 크기" 매개변수를 줄여 보십시오. 이렇게 하면 계산 시간이 크게 늘어나지 않으면서 정확도가 향상됩니다.
-
이것으로 만족스럽지 않으면 동시에 "이산 거리 수량"을 늘리고 "기준점 스텝 크기" 매개변수를 줄이십시오. 매개변수 값을 조정할 때는 계산 시간도 고려하십시오.
-
그래도 만족스럽지 않으면 "클러스터링 각도 임계값"과 "클러스터링 거리 임계값" 매개변수를 줄여 보십시오.