🔷Point Cloud Coordinate System Transform
Function Description
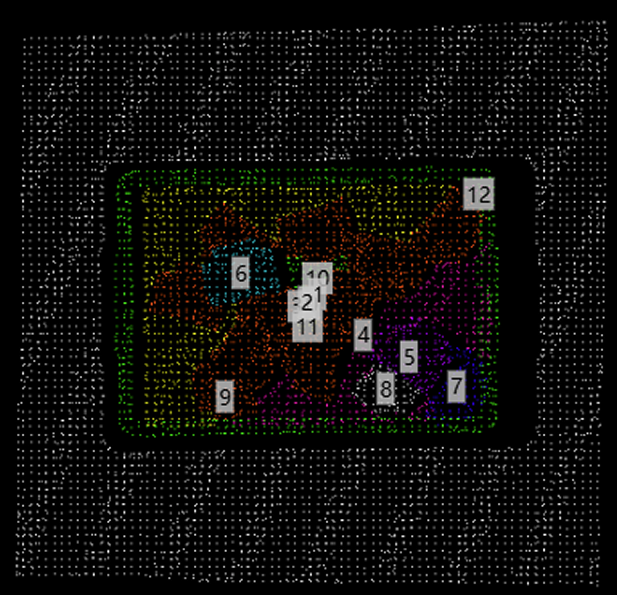
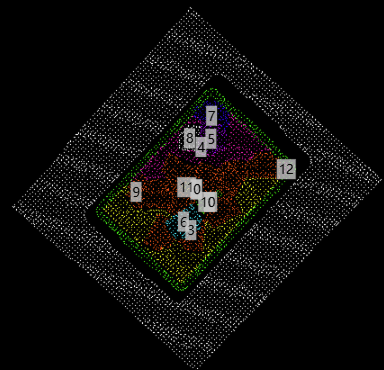
This operator is used to transform input point cloud data from one coordinate system to another coordinate system. It achieves this by left-multiplying the input point cloud (or point cloud list) with a 4x4 homogeneous transformation matrix (usually a hand-eye calibration matrix). If the input point cloud contains normal vector information, its normal vectors will also undergo corresponding rotational transformation.
Usage Scenarios
Coordinate system transformation and data alignment : Transform point clouds from different coordinate systems to the same reference coordinate system, for example, converting point cloud data collected in camera coordinate system to robot base coordinate system.
Input Output
Input |
Hand-eye calibration matrix: 4x4 homogeneous transformation matrix. Point cloud: Input point cloud or point cloud list to be transformed. |
|
Output |
Transformed point cloud: Point cloud list transformed to the target coordinate system. |
|
Parameter Description
|
This operator has two versions:
Both have identical core functionality, differing only in the type of point cloud data they process. |