🔷Connected Component Segmentation
Function Description
This operator performs clustering segmentation on the input point cloud. It combines spatially close enough points into independent point cloud clusters. If the distance between two points is less than the set "connectivity distance threshold", they are considered to belong to the same connected component (i.e., the same cluster). Finally, it outputs a point cloud list where each point cloud represents a segmented cluster.
Usage Scenarios
-
Instance Segmentation: Segment mutually separated objects in a scene into independent point cloud clusters.
-
Noise Removal: Can filter out point cloud clusters with too few points that are likely noise.
-
Point Cloud Preprocessing: Before performing tasks like target recognition and pose estimation, segment the original point cloud into meaningful units to simplify subsequent processing.
Input Output
Input |
Point cloud: Input point cloud or point cloud list. |
|
Output |
Segmented point cloud: List of point clouds obtained after segmentation, where each element is a segmented point cloud cluster. |
|

Parameter Description
|
This operator has two versions:
Both have identical functionality and parameters, differing only in the type of point cloud data processed. |
|
The output can handle single point clouds or point cloud lists. If it’s a list, each point cloud in the list will be segmented independently, and then all results will be merged for output (according to sorting and retention parameters). |
Connectivity Distance Threshold
Parameter Description |
Defines the maximum distance at which points are considered "connected". If the distance between two points is greater than this threshold, they definitely do not belong to the same clustering cluster. |
Parameter Adjustment |
|
Parameter Range |
[0.0001, 1000], default: 10 |
|
|
|
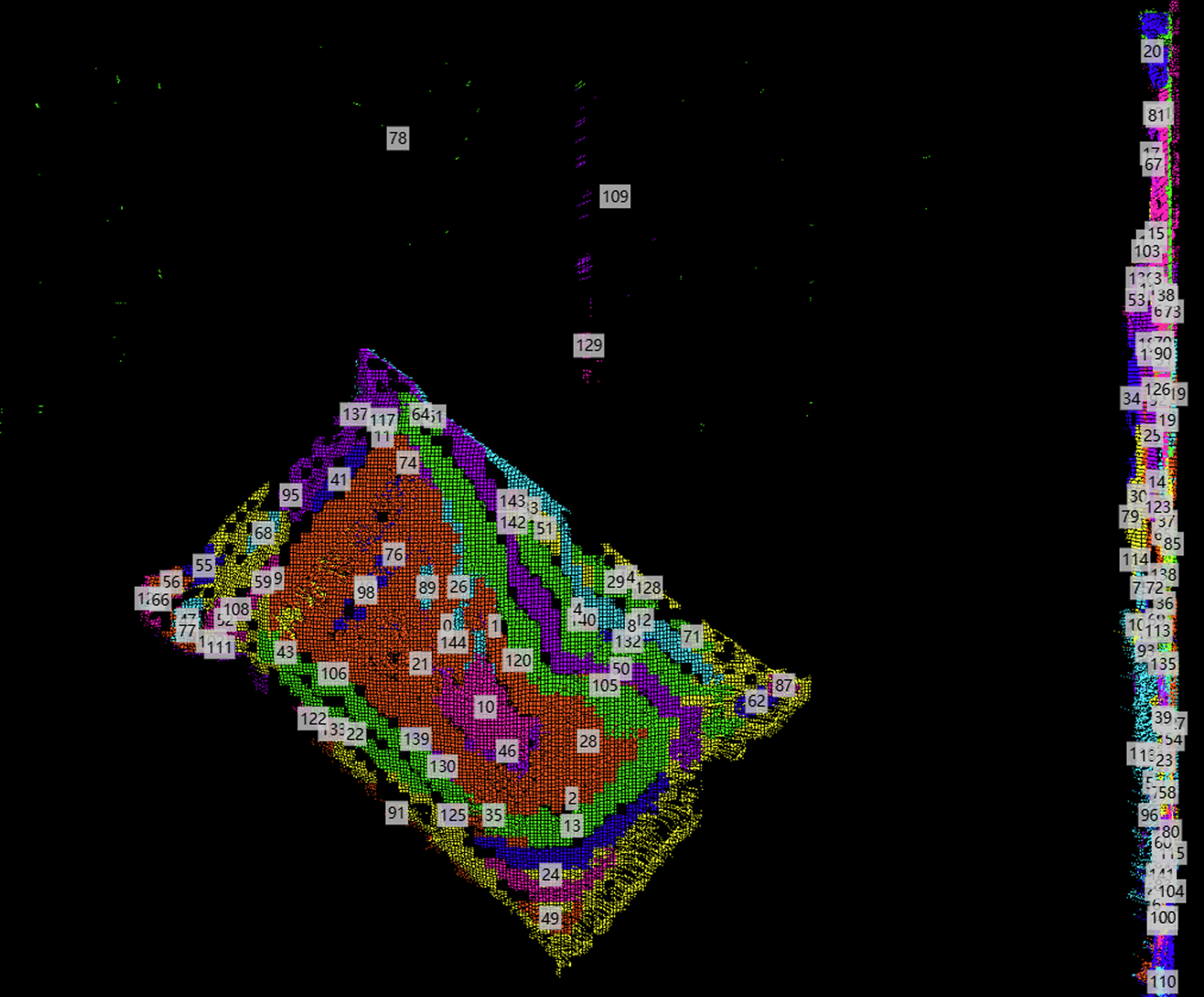
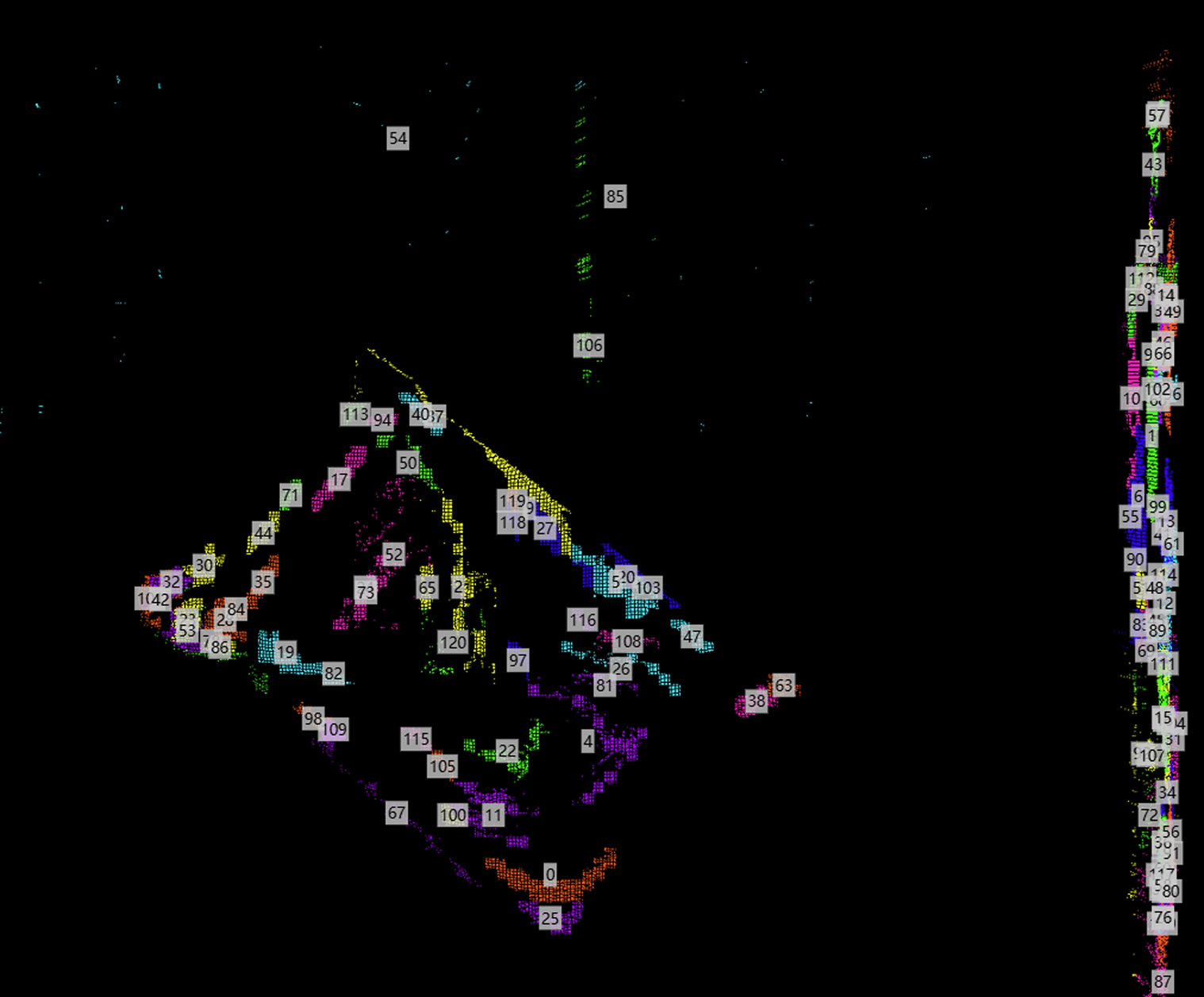
Connectivity distance threshold=10 |
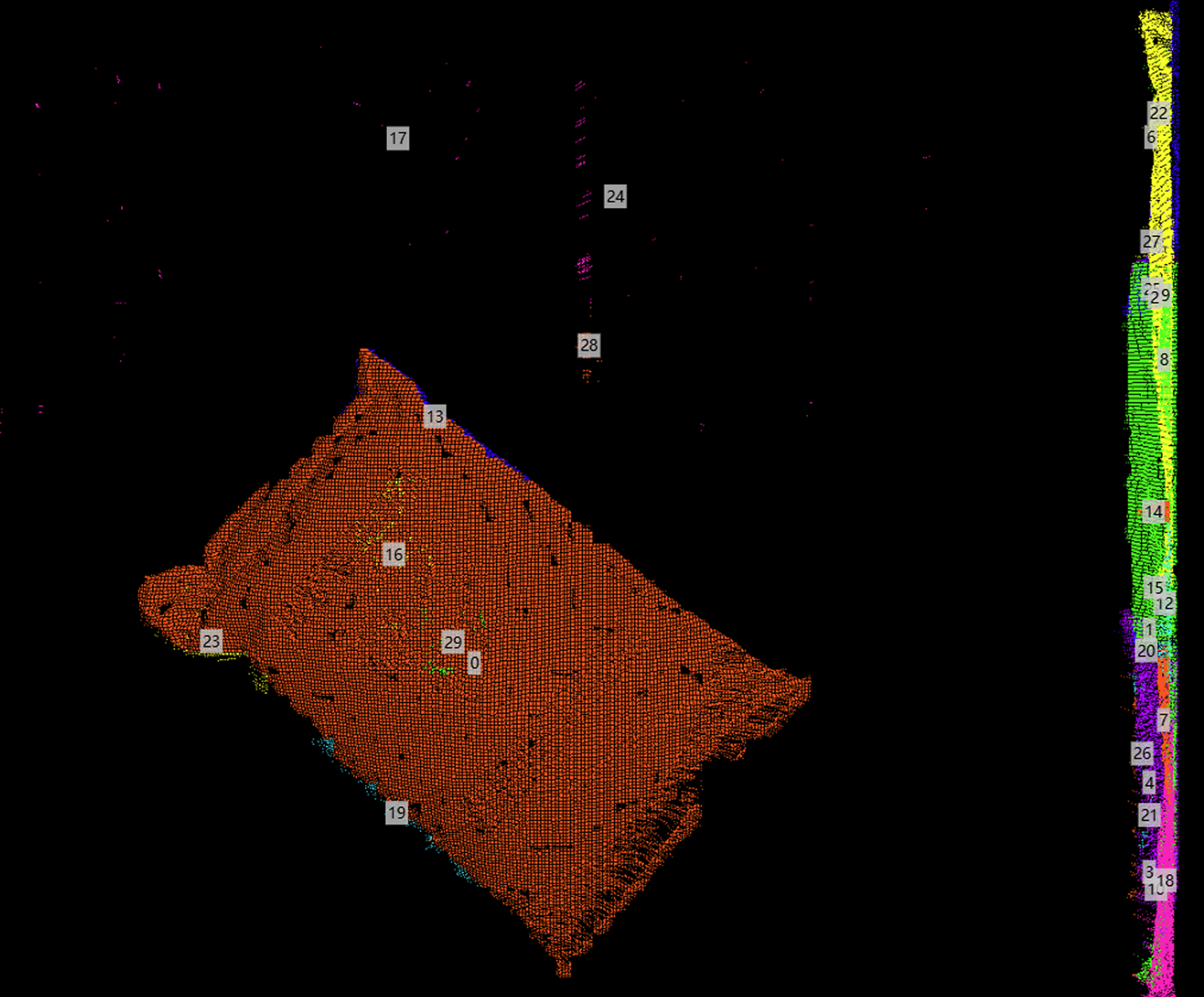
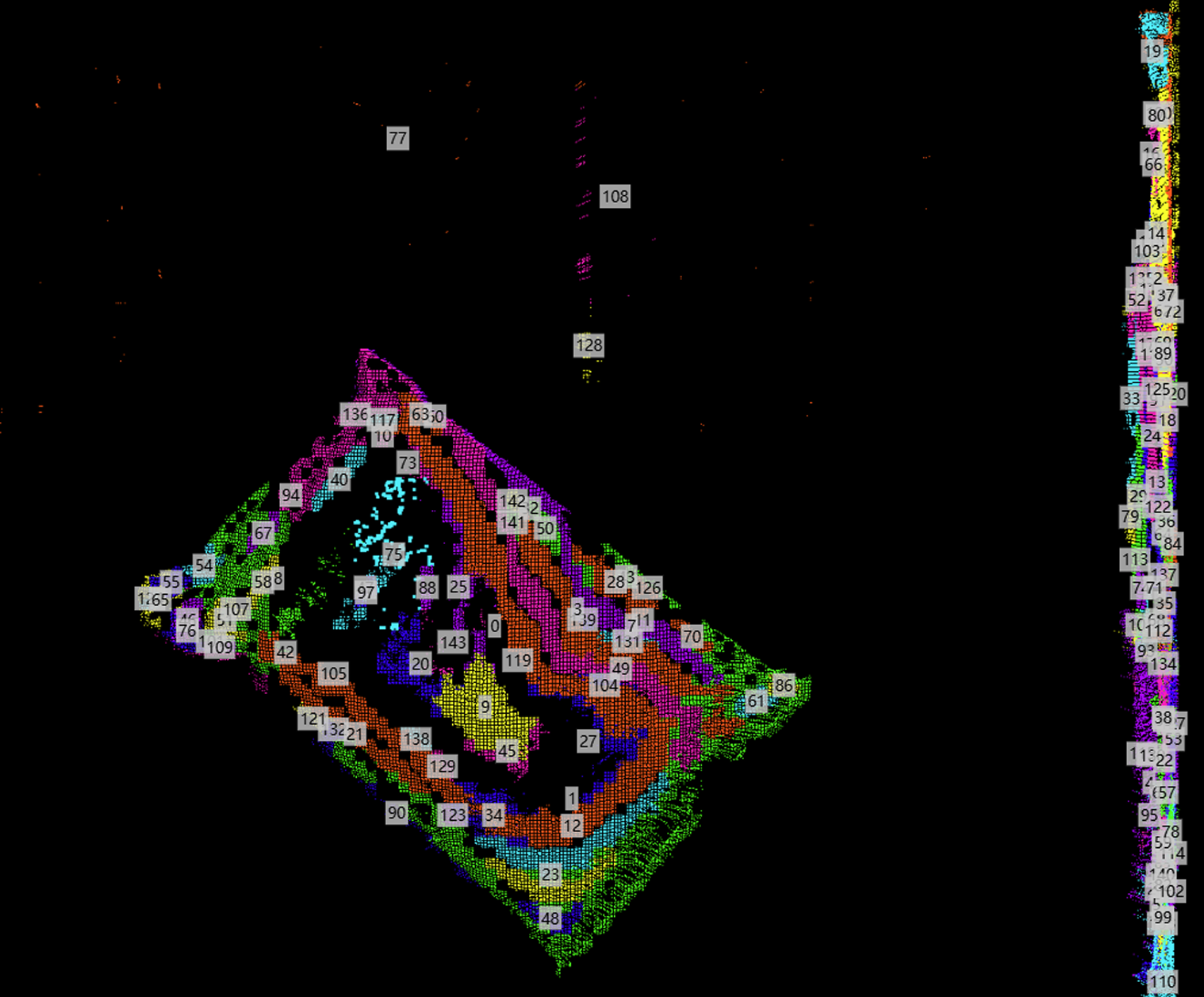
Connectivity distance threshold=15 |
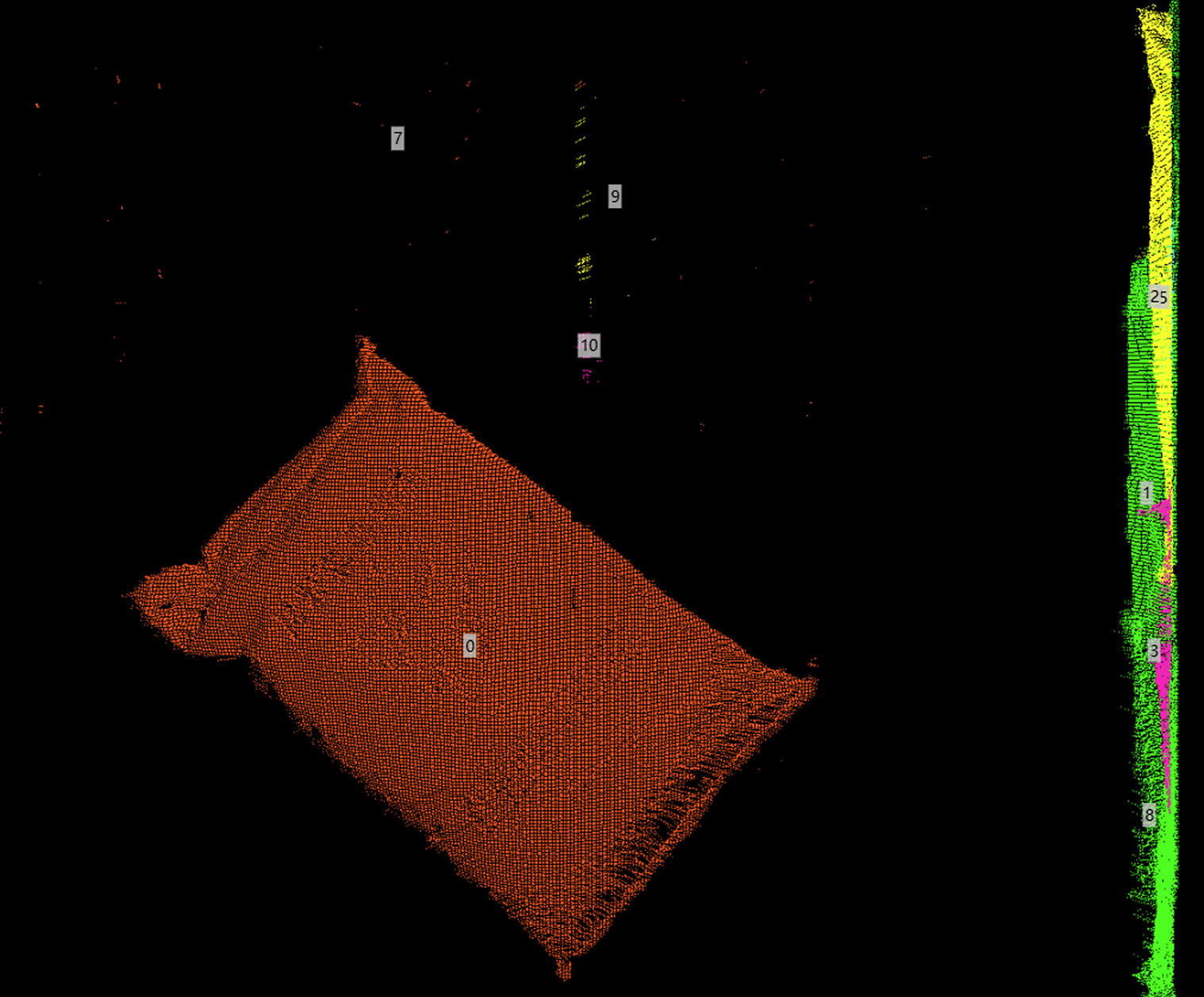
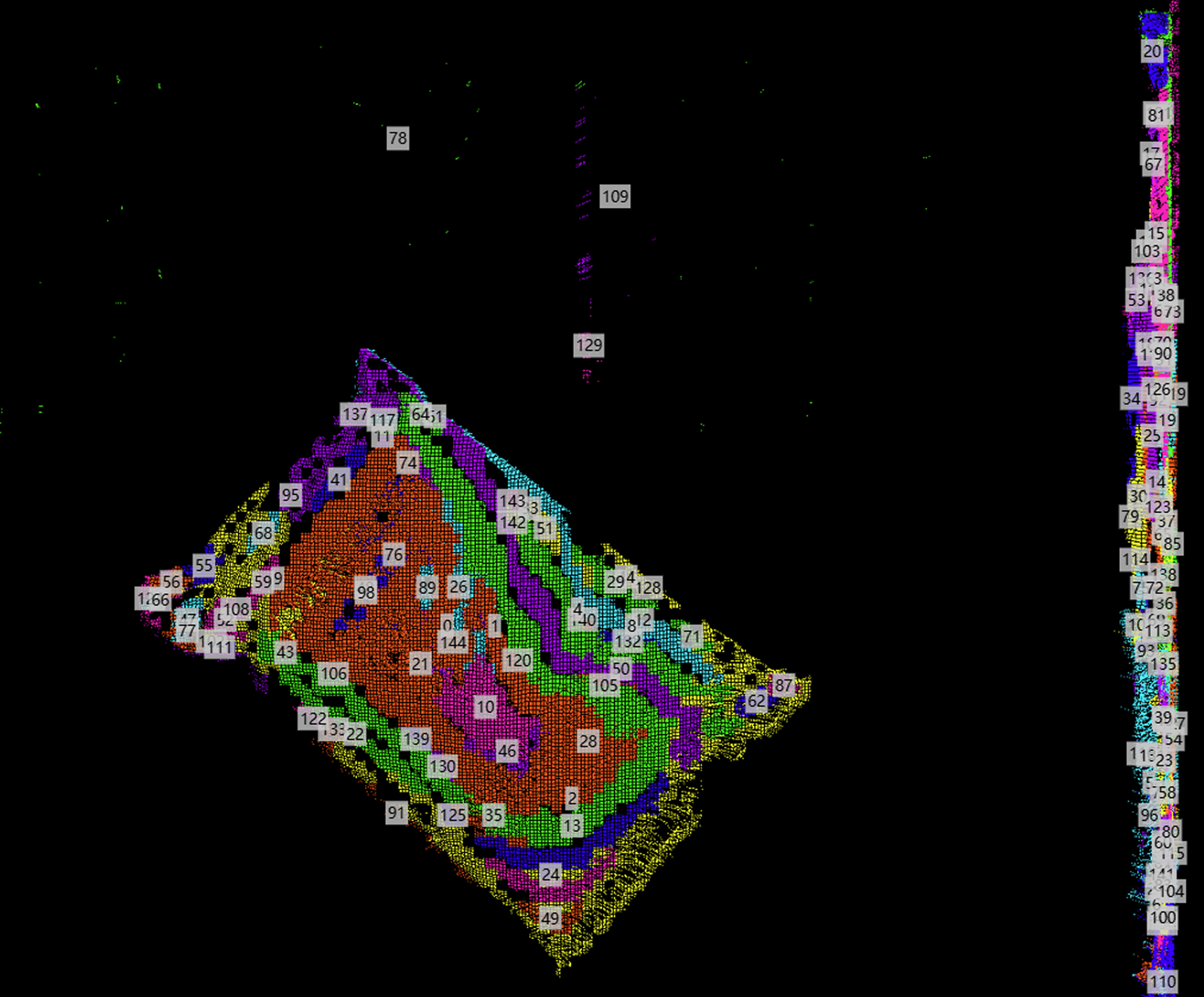
Connectivity distance threshold=30 |
Minimum Cluster Point Count
Parameter Description |
The minimum number of points that a valid clustering cluster must contain. |
Parameter Adjustment |
Used to filter out small point cloud clusters, which are usually noise or incomplete object parts. Increasing this value can remove more small clusters (noise), but if set too large, it may filter out effectively small valid objects. |
Parameter Range |
[1, 4000000], default: 100 |
|
|
|
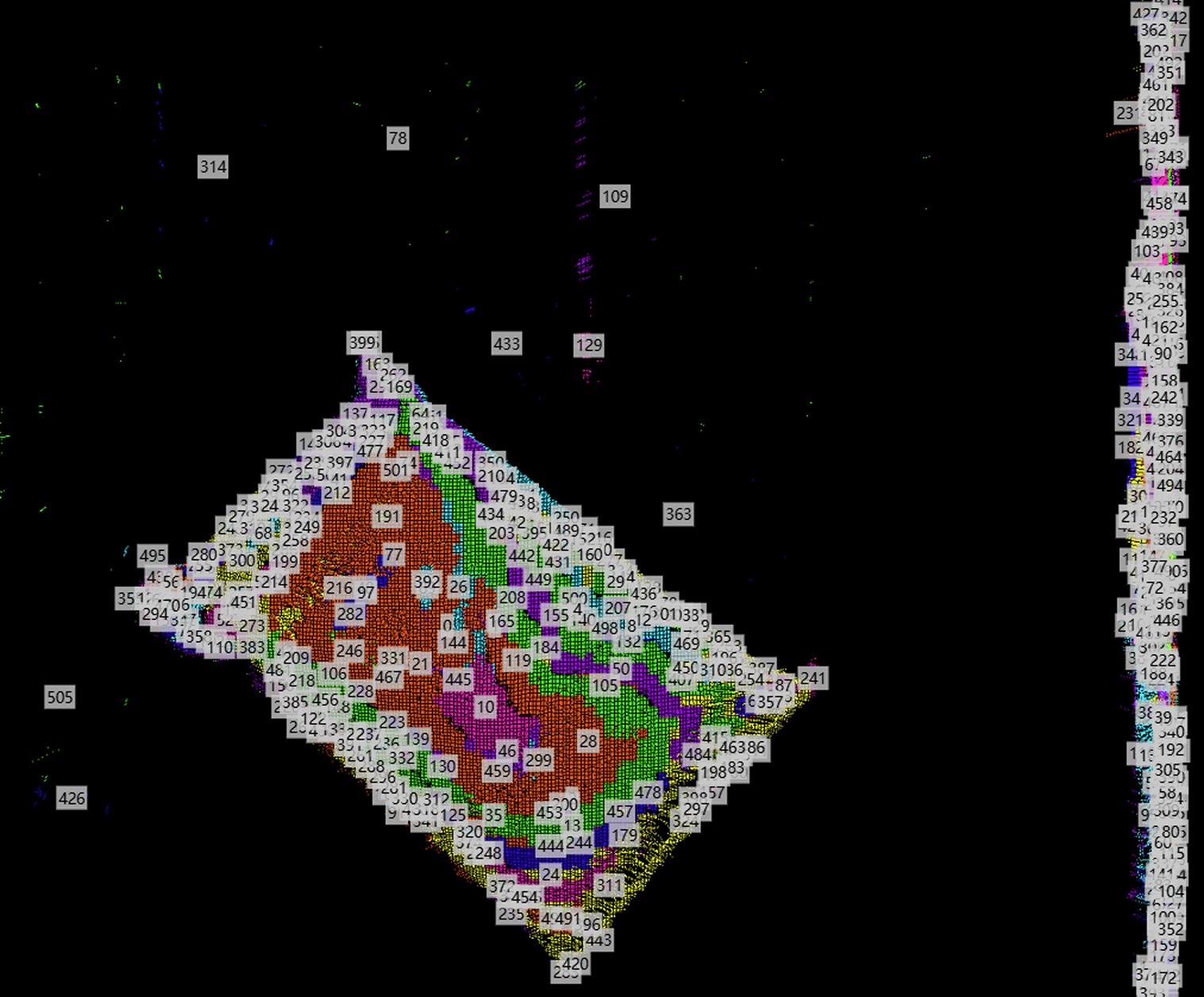
Minimum cluster point count=50 |
Minimum cluster point count=100 |
Minimum cluster point count=300 |

Maximum Cluster Point Count
Parameter Description |
The maximum number of points that a valid clustering cluster is allowed to contain. |
Parameter Adjustment |
Used to filter out overly large point cloud clusters. This may be useful in certain scenarios, for example, when background or ground is incorrectly clustered into a very large cluster, it can be removed through this parameter. Usually keep the default value (a very large number), unless there is a clear need to filter out extremely large point cloud clusters. |
Parameter Range |
[1, 4000000], default: 4000000 |
|
|
|
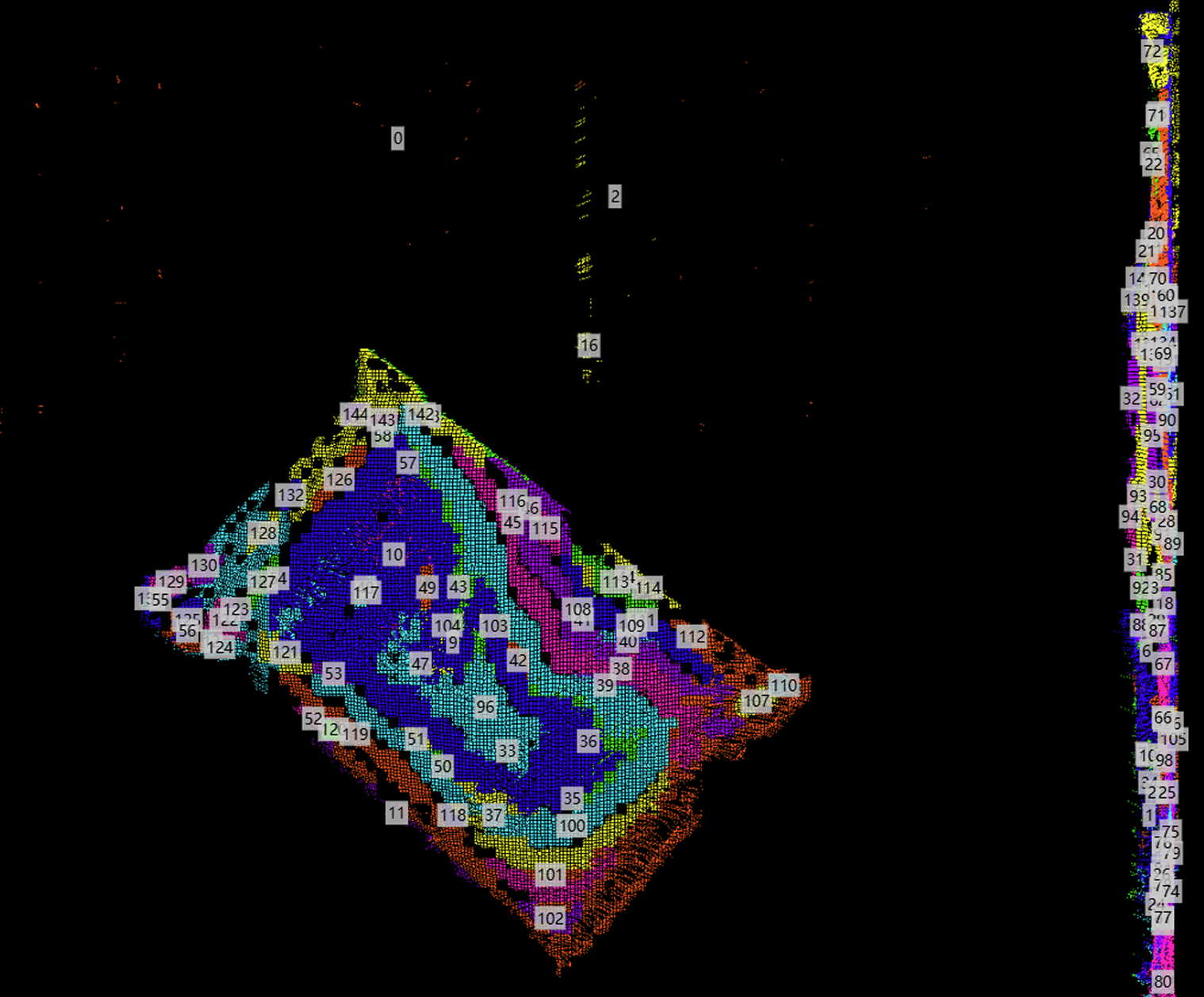
Maximum cluster point count=1000 |
Maximum cluster point count=10000 |
Maximum cluster point count=100000 |
Enable Sorting
Parameter Description |
Determines whether to sort the final output point cloud cluster list by point count from large to small. |
|
Parameter Adjustment |
Enable (default): Output point cloud list is sorted by point count from most to least. |
|
Disable: Output point cloud list order is indeterminate. |
|
|
If subsequent processing depends on the size order of point cloud clusters (e.g., always processing the largest cluster), this should remain enabled. |
||
Retain All Results
Parameter Description |
Determines whether to output all clustering results that meet size conditions. |
Parameter Adjustment |
|