🔷2D Image Edge
Functional Description
This operator uses the classic Canny edge detection algorithm to extract edge features from input images. Through multi-stage processing, it finds locations where grayscale intensity changes dramatically in the image, effectively detecting edges while suppressing noise.
Usage Scenarios
-
Feature Extraction: Extract object contour edges as key features before performing shape recognition, object detection, or image matching tasks.
-
Image Segmentation Assistant: Edge information can serve as input or reference for image segmentation algorithms.
-
Visual Inspection: Detect defects such as scratches and cracks on product surfaces, which typically appear as obvious edges.
Input Output
Input |
Image: Image for edge detection, supports grayscale or color images (color images will be automatically converted to grayscale for processing) |
|
Output |
Result Image: Edge image obtained after Canny algorithm processing. This is a binarized grayscale image where detected edge pixels are typically white and background pixels are black. |
|

Parameter Description
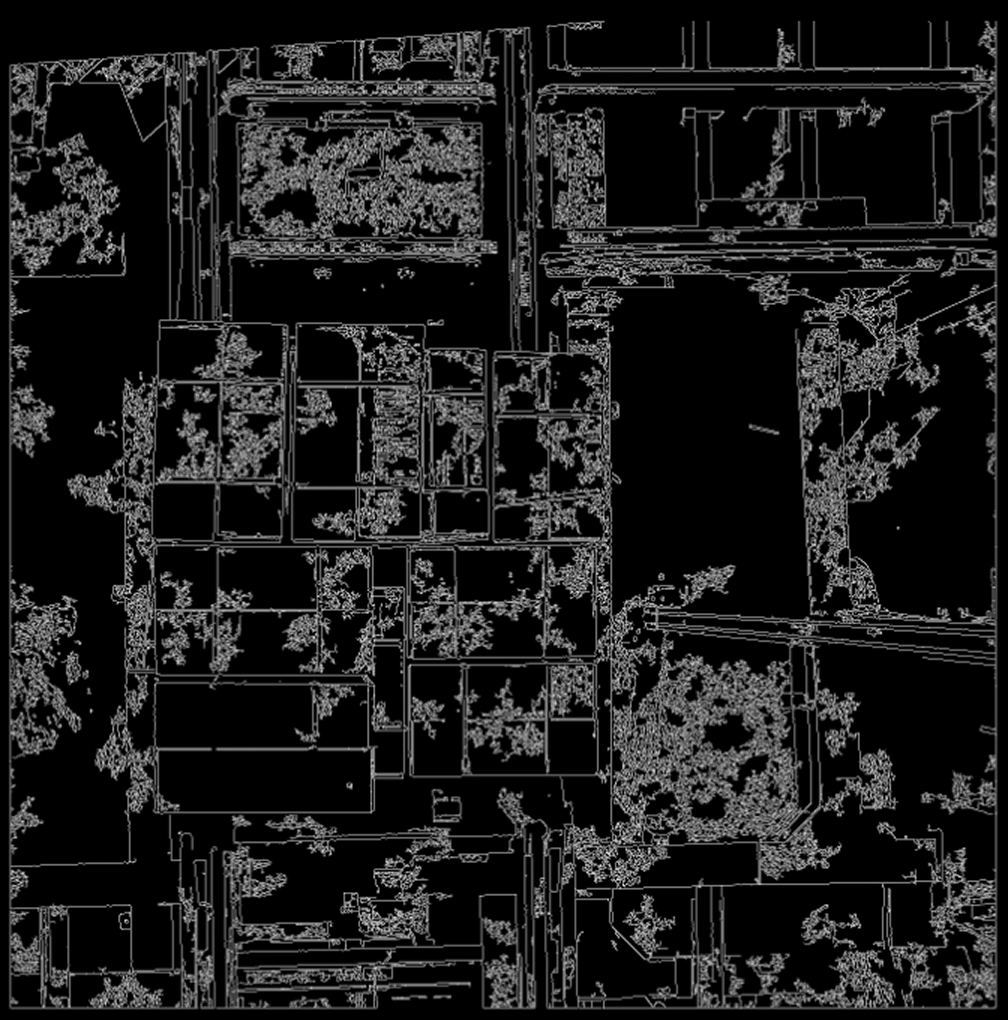
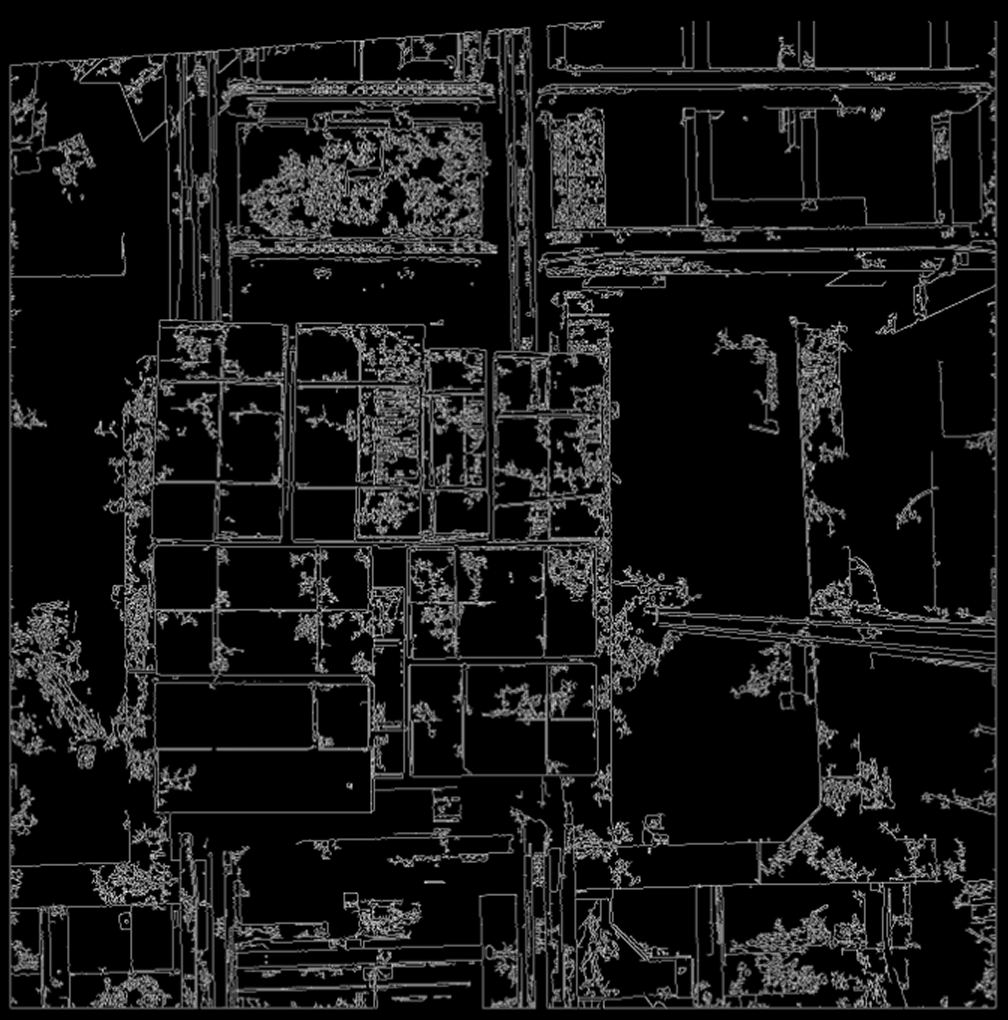
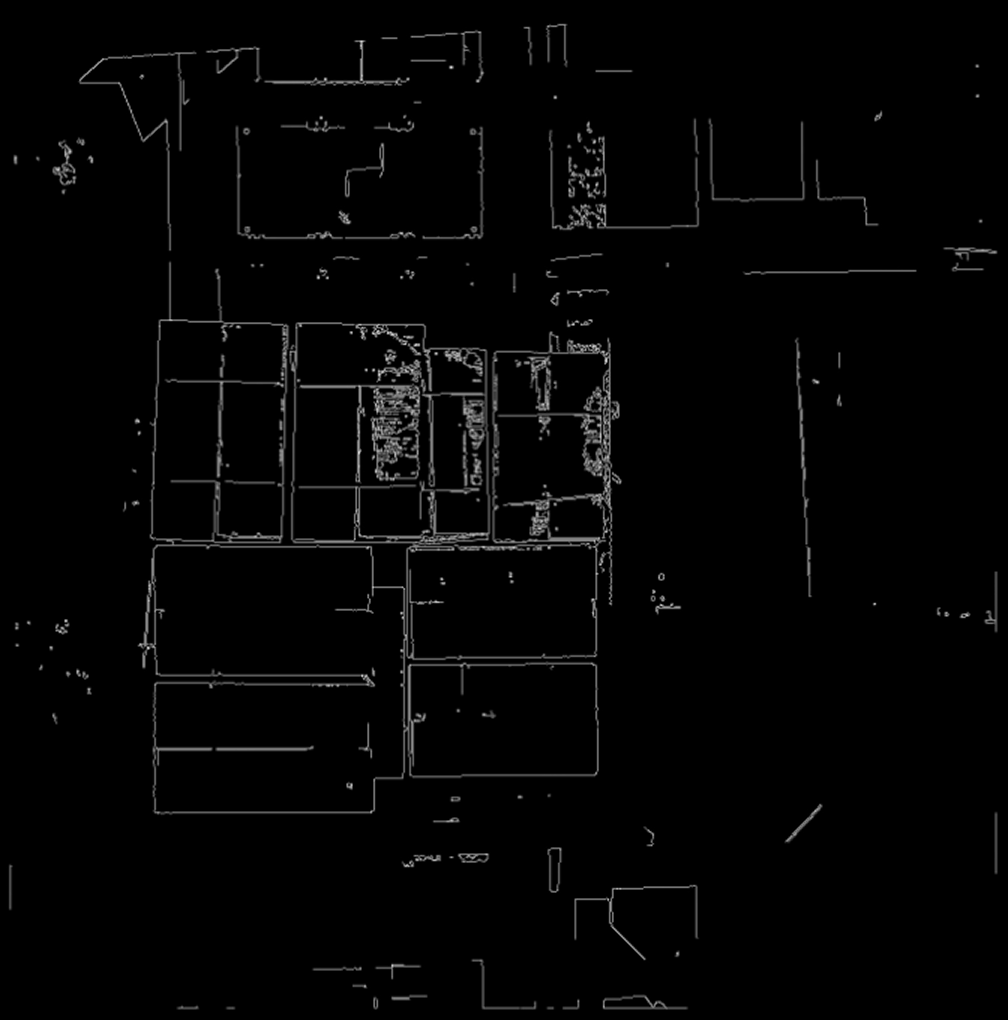
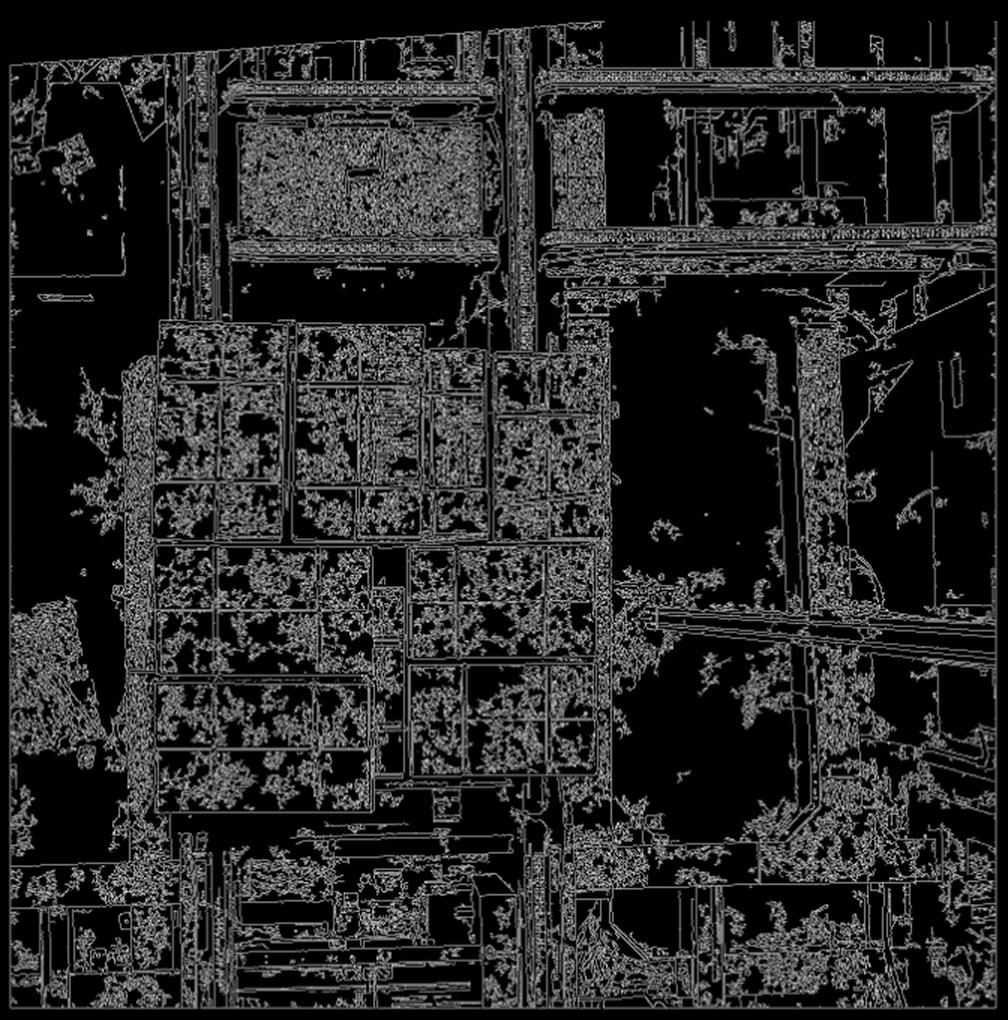
Low Threshold
Parameter Description |
Low threshold. If a pixel’s gradient magnitude is below this value, it will not be considered as an edge candidate point. |
Parameter Adjustment |
Lowering threshold: May allow weaker, less obvious edges to be retained, making edge lines more complete and coherent, but may also mistakenly identify some "noise" that isn’t originally edges as edges. Raising threshold: More strictly filters edges, only retaining parts with strong changes, weak edges will be ignored. |
Parameter Range |
[0, 1000], Default value: 1 |
|
|
|
|
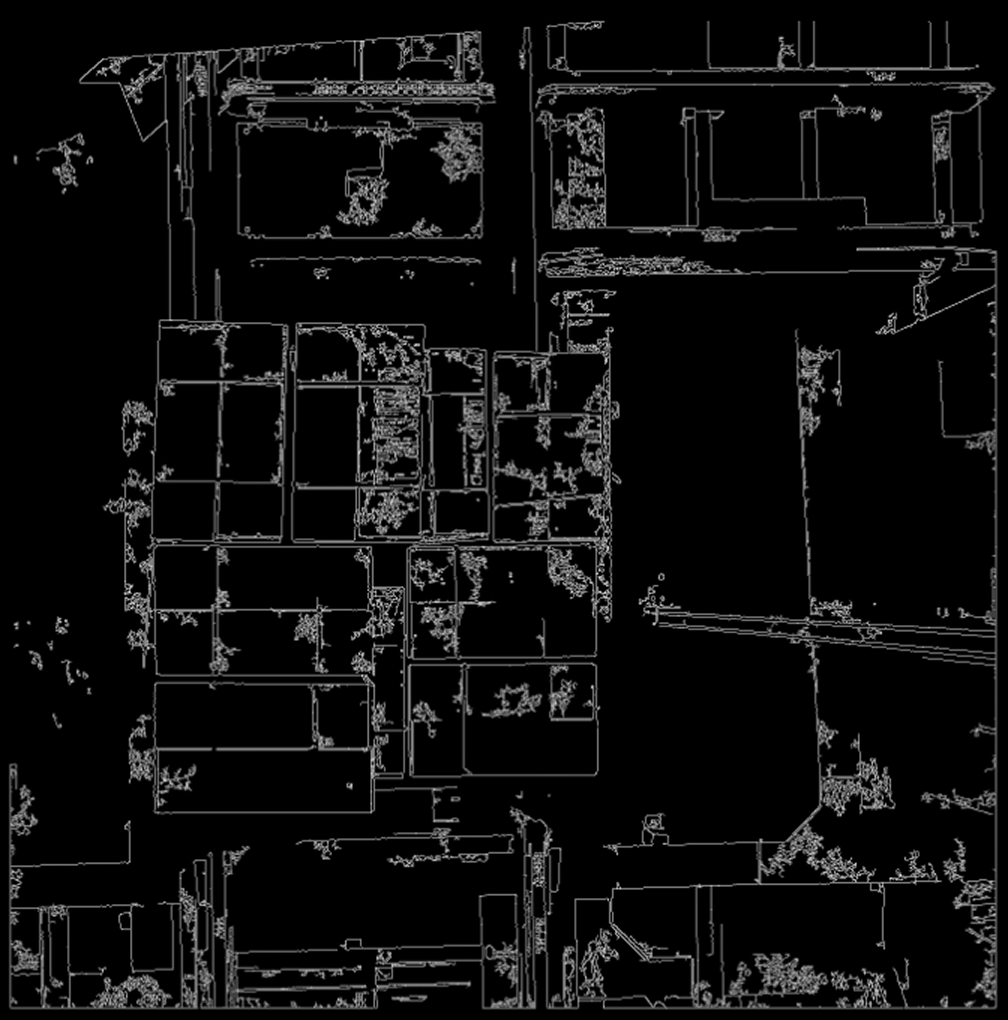
Low Threshold=1 |
Low Threshold=50 |
Low Threshold=100 |
Low Threshold=200 |


High Threshold
Parameter Description |
High threshold. If a pixel’s change intensity is above this value, it will definitely be identified as an edge point. |
Parameter Adjustment |
Raising threshold: Will make only very obvious edges detected, the number of edges in results may decrease; Lowering threshold: Will detect more weaker edges, the number of edges may increase, but may also include more false edges caused by noise or texture. |
Parameter Range |
[0, 1000], Default value: 100 |
|
|
|
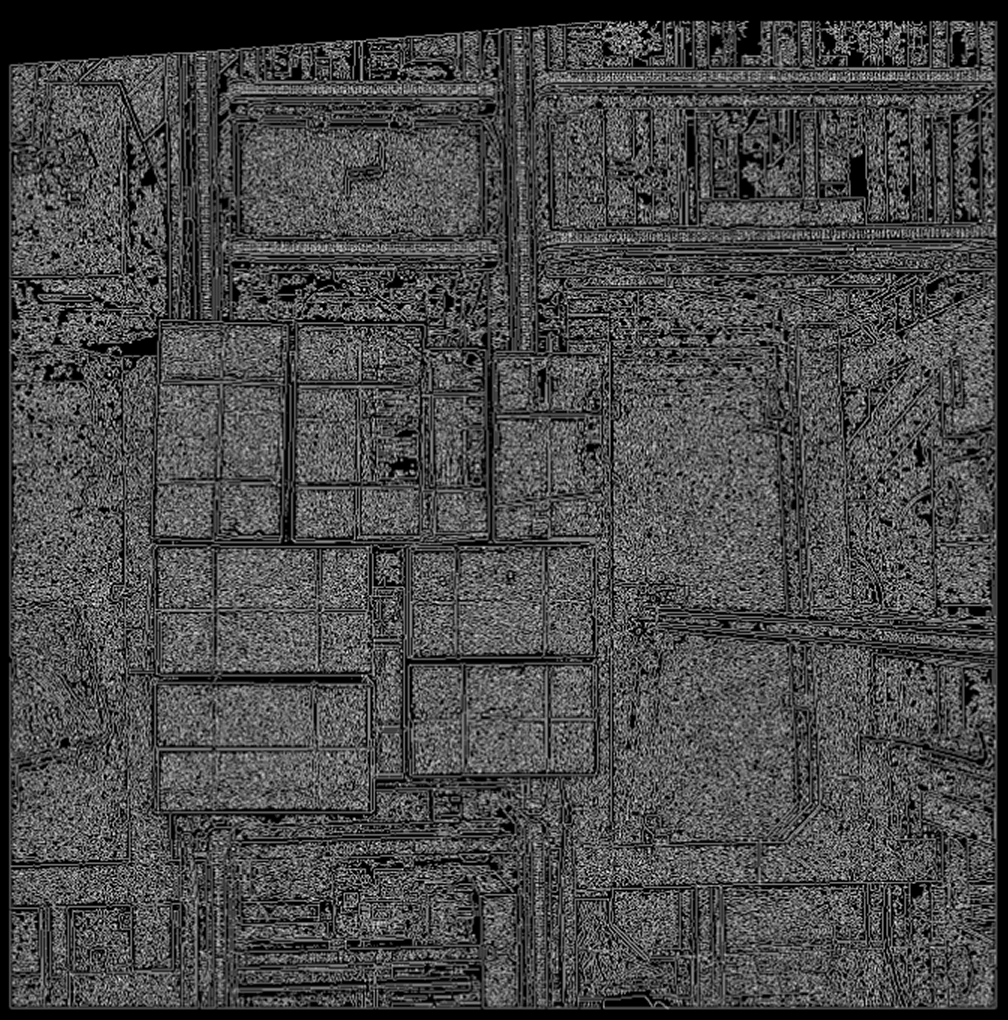
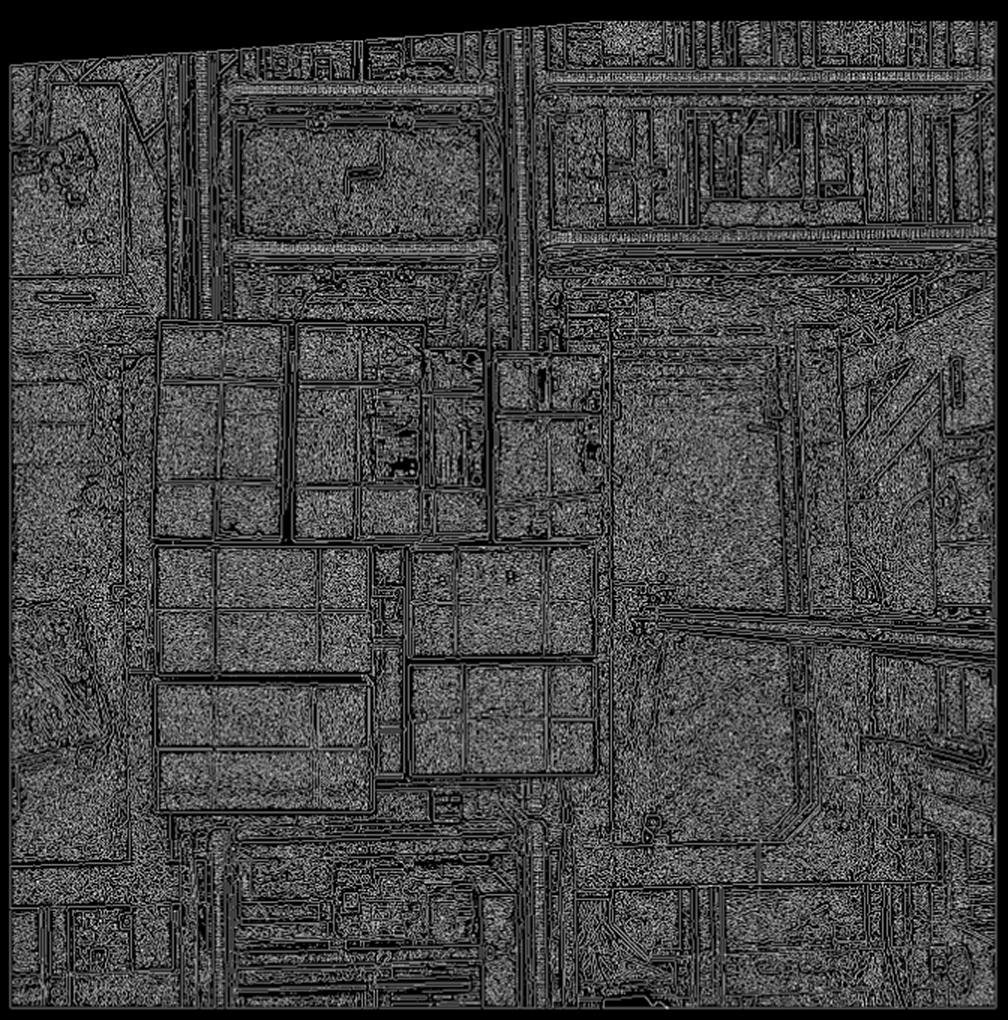
High Threshold=50 |
High Threshold=100 |
High Threshold=200 |
Edge Detection Window Size
Parameter Description |
Aperture size of the Sobel operator used when calculating image gradients, affecting the smoothness degree of gradient calculation and sensitivity to noise. |
Parameter Adjustment |
|
Parameter Range |
[3,5,7], Default value: 3 |
|
|
|
Edge Detection Window Size=3 |
Edge Detection Window Size=5 |
Edge Detection Window Size=7 |
Precision Mode
Parameter Description |
Switch between fast mode (L1 norm) or precision mode (L2 norm) to calculate gradient magnitude, using fast mode by default. |
|
Parameter Adjustment |
Off (Default): Uses L1 norm to calculate gradient magnitude, theoretically slightly faster in computation. |
|
On: Uses L2 norm to calculate gradient magnitude, theoretically can more accurately represent gradient intensity, may detect relatively fewer edges. |
|
|