🔷Adjust Pick Object Pose
Function Description
This operator is used to apply translation and/or rotation adjustments to input pose lists, providing two adjustment methods:
-
Translation Rotation Transform : Apply a fixed translation (X, Y, Z offset) and rotation (rotation by specified angles around X, Y, Z axes) to each pose in the list. This transformation can be based on the world coordinate system or the local coordinate system of the pose itself. Each input pose generates one adjusted output pose.
-
Posture Mirroring : For each pose in the list, first apply a basic translation offset, then generate multiple new poses with symmetric rotation relationships based on user-set symmetry parameters (generating multiple discrete angles around X, Y, Z axes within specified angle ranges). This method generates multiple output poses for each input pose, similar to the symmetry function of the "Generate Pick Points (Parameter Generation)" operator.
Usage Scenarios
-
Pick Point Fine-tuning : After calculating initial pick poses, make fine position adjustments (e.g., lifting Z value upward) or attitude adjustments (e.g., rotating Z-axis angle) as needed.
-
Coordinate System Calibration : Apply manual coordinate system compensation translation or rotation to poses.
-
Generate Symmetric Pick Points : For objects or gripping strategies with symmetry, quickly generate multiple equivalent or symmetric pick poses through the "Posture Mirroring" method.
-
Test Different Attitudes : Generate a series of poses with different rotation angles from a base pose for testing or planning.
Input/Output
Input |
Pick Object Pose Information: Input pose list. Drawing Scene: Scene point cloud, mainly used for overlaying adjusted poses in the visualization interface, not directly involved in calculations. |
|
Output |
Pick Object Pose Information: Pose list after adjustment or mirror generation. If using "Translation Rotation Transform", the output list length is the same as the input; if using "Posture Mirroring", the output list length is typically a multiple of the input. |
|
Parameter Description
|
Coordinate System
Parameter Description |
Select which coordinate system the subsequent translation and rotation operations are based on. |
Parameter Adjustment |
Note :If translation and rotation need to be based on different coordinate systems, two of these nodes can be connected in series. |
Adjustment Method
Parameter Description |
Select the core method for adjusting poses. Different methods correspond to different subsequent parameters. |
Parameter Adjustment |
|
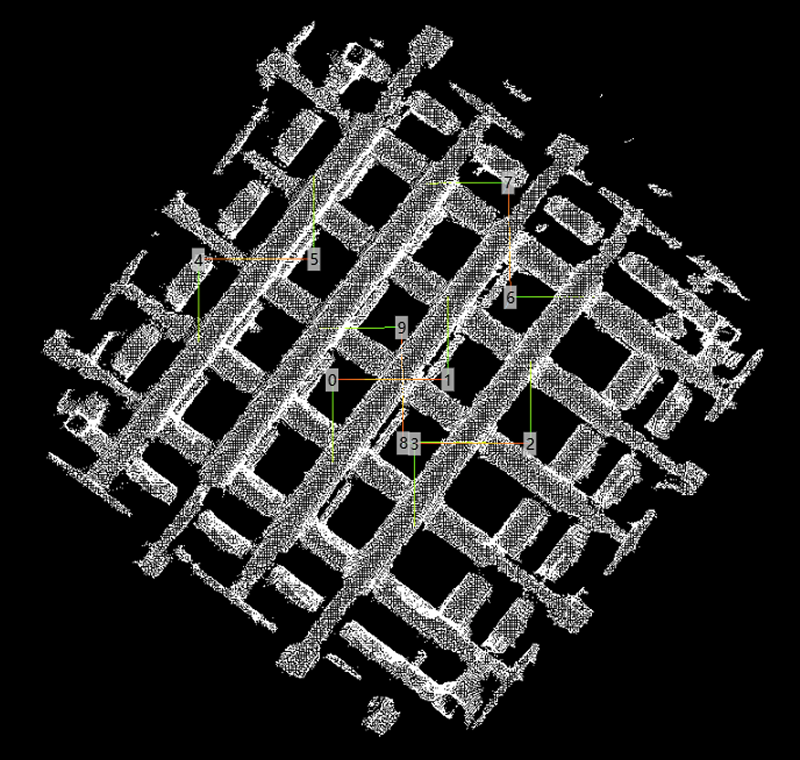
Superimpose X/Y/Z Axis Translation
Parameter Description |
Translation amounts applied in the X, Y, Z axis directions respectively under the selected coordinate system. For the "Translation Rotation Transform" method, this is the main translation operation; for the "Posture Mirroring" method, this is the basic offset applied before symmetric rotation. |
Parameter Adjustment |
Set the distance you want the pose to move. Positive values indicate movement in the positive axis direction, negative values indicate movement in the negative direction. |
Parameter Range |
[-10000, 10000], Default: 0, Unit: mm |
|
|
|
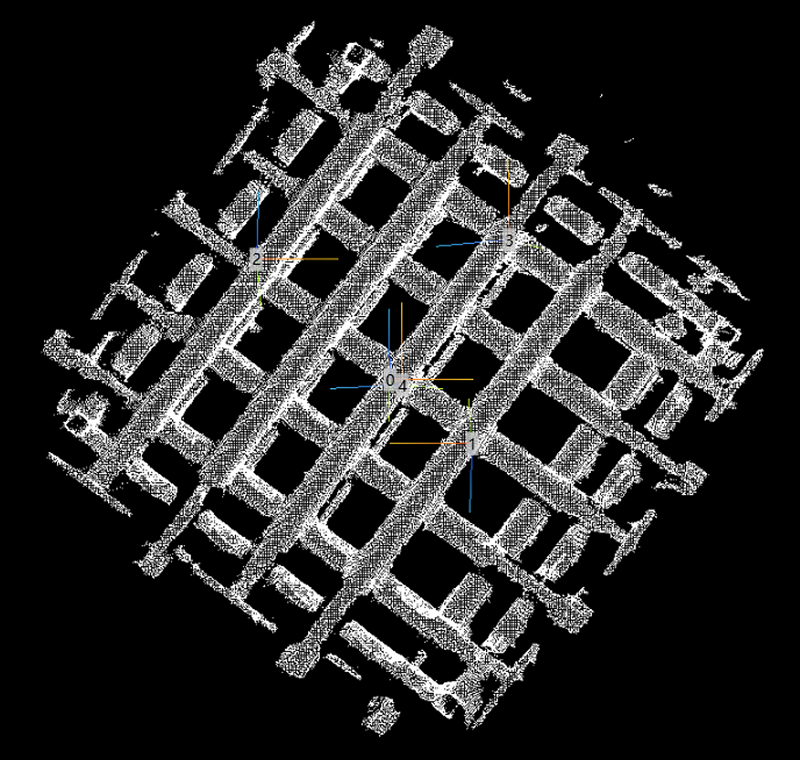
Superimpose X Axis Translation=-100mm |
Superimpose X Axis Translation=0mm |
Superimpose X Axis Translation=100mm |
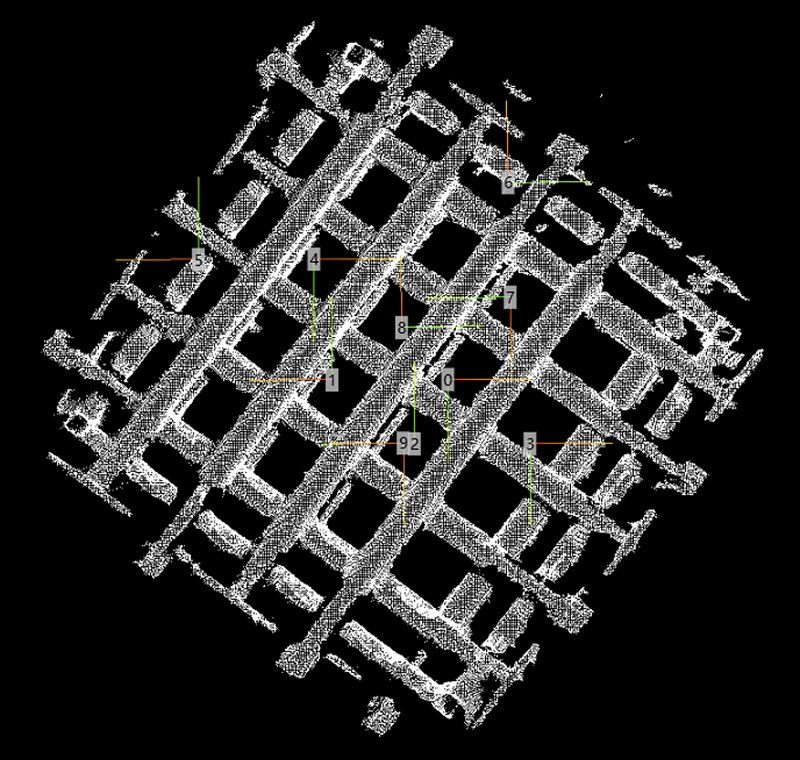
Rotate Around X/Y/Z Axis
Parameter Description |
Only effective when the adjustment method is set to "Translation Rotation Transform". Rotation angles applied around the X, Y, Z axes respectively under the selected coordinate system. |
Parameter Adjustment |
Set the additional rotation angle desired for the pose, rotation order is typically X first, then Y, then Z. |
Parameter Range |
[0, 360], Default: 0, Unit: degrees |
|
|
|
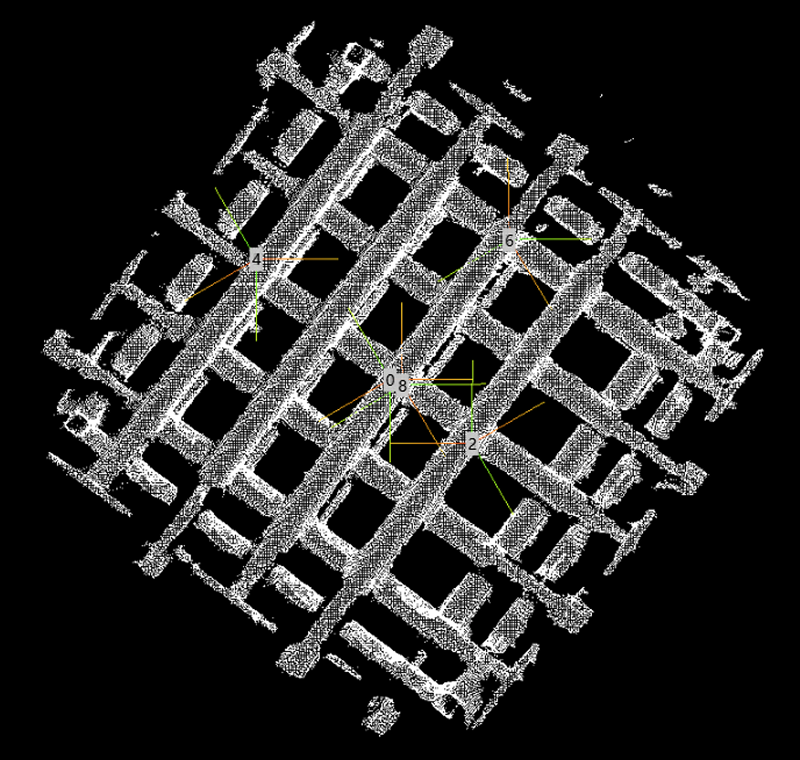
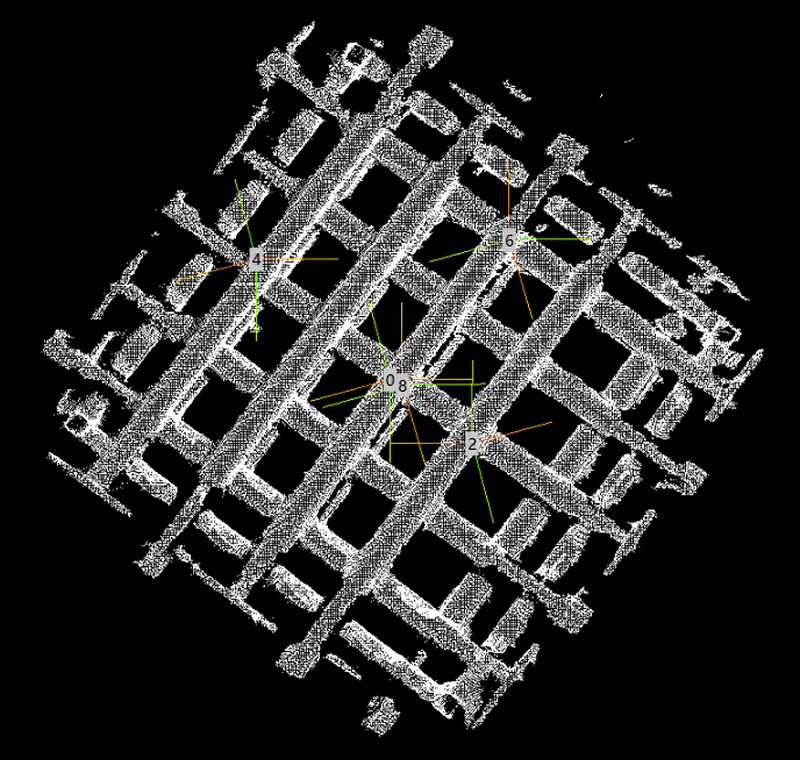
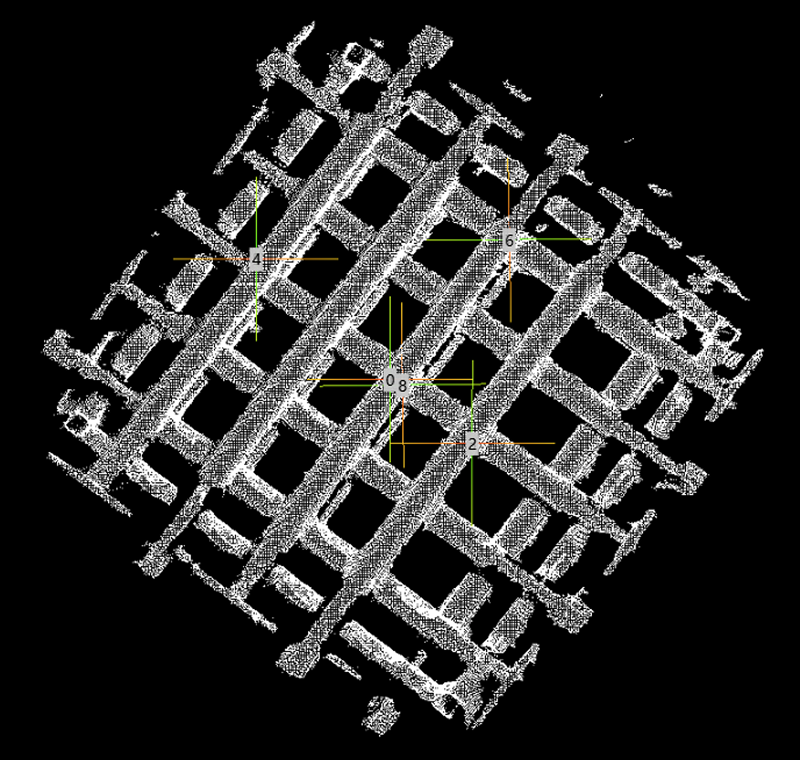
Rotate Around X Axis=0 degrees |
Rotate Around X Axis=30 degrees |
Rotate Around X Axis=60 degrees |
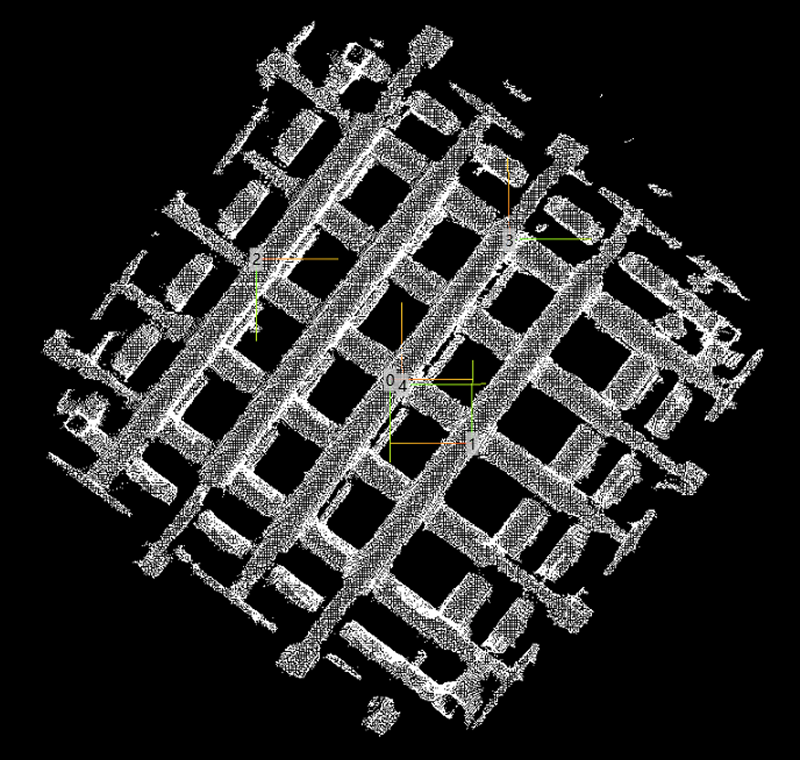
Symmetry Along X/Y/Z Axis (Number of Angle Discretizations)
Parameter Description |
Only effective when adjustment method is set to "Posture Mirroring". Set whether and how to generate symmetric pick points around the pose’s own X, Y, Z axes, with the value representing the number of discrete angles to be generated in the symmetric rotation around that axis. |
Parameter Adjustment |
|
Parameter Range |
[0, 360], Default: 0, Unit: degrees |
|
|
|
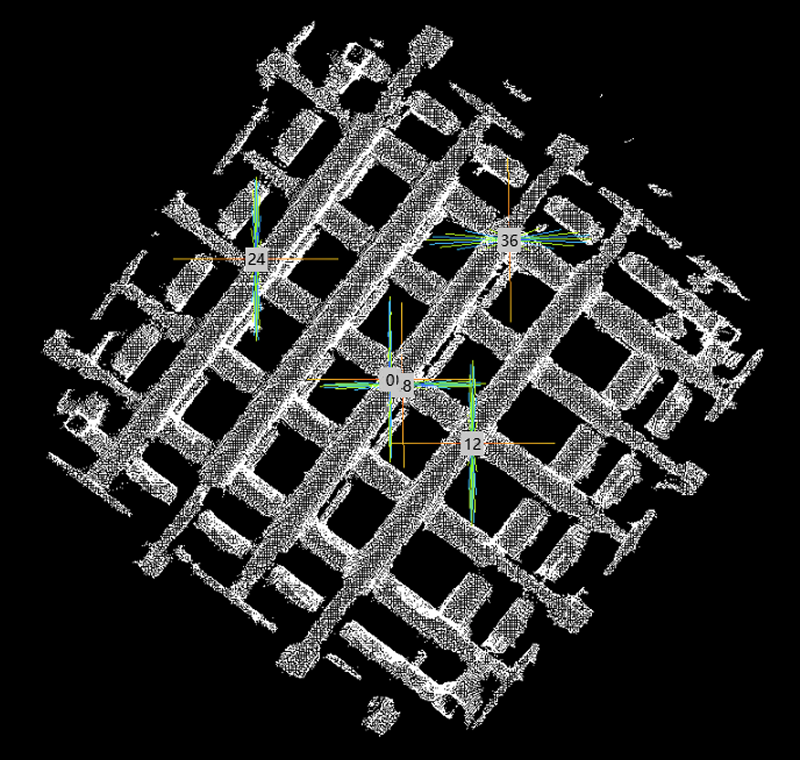
Symmetry Along X Axis=0 degrees |
Symmetry Along X Axis=10 degrees |
Symmetry Along X Axis=30 degrees |
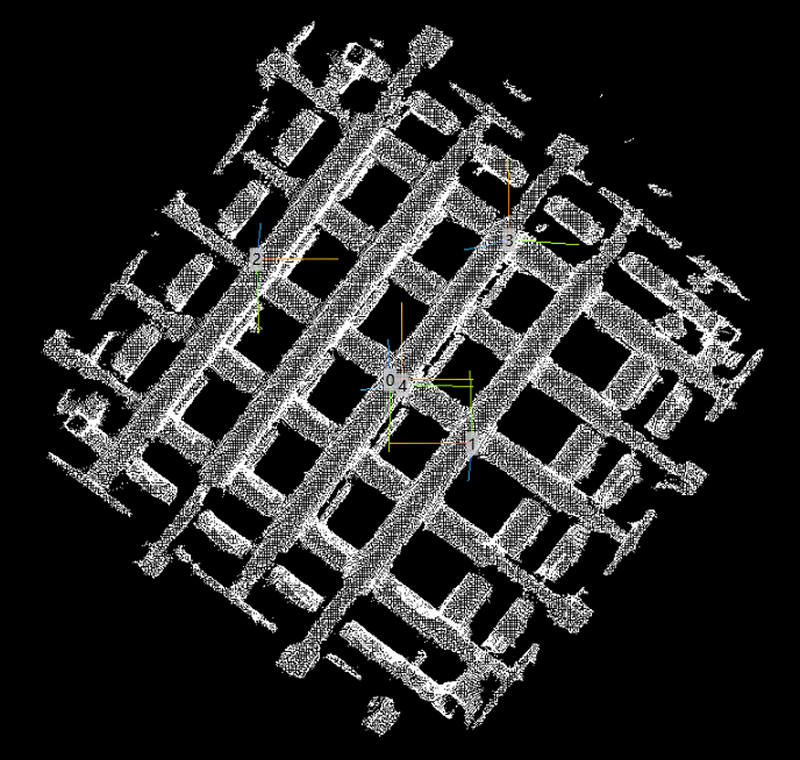
Minimum Angle
Parameter Description |
Only effective when adjustment method is set to "Posture Mirroring". When axis symmetry generation is enabled, this is the starting rotation angle of the generated symmetric poses. |
Parameter Adjustment |
Define the lower limit of the angle range for symmetric generation. |
Parameter Range |
[0, 360.1], Default: 0, Unit: degrees |
|
|
|
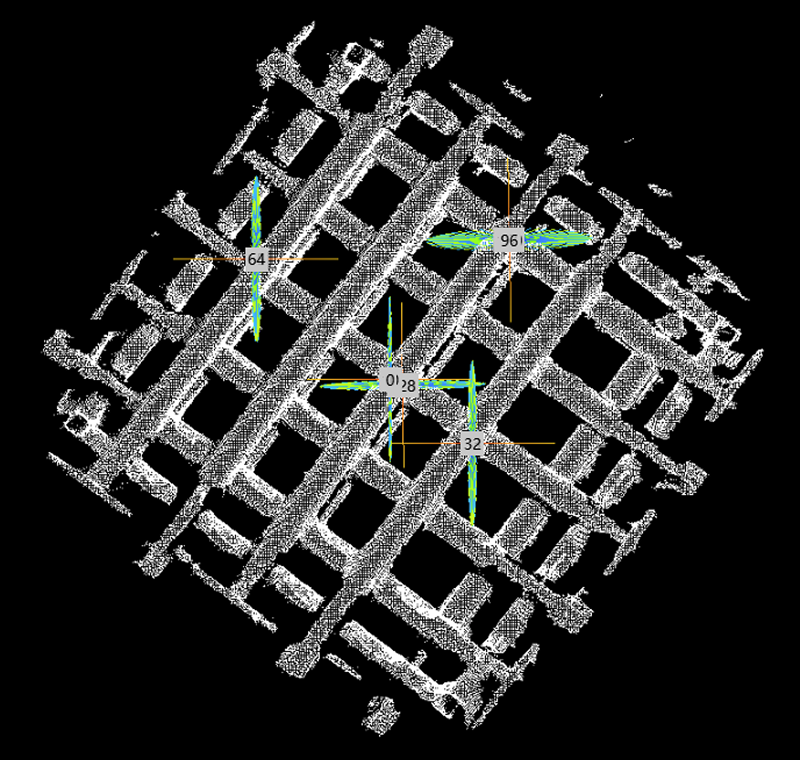
Minimum Angle=0 degrees |
Minimum Angle=30 degrees |
Minimum Angle=60 degrees |
Maximum Angle
Parameter Description |
Only effective when adjustment method is set to "Posture Mirroring". When axis symmetry generation is enabled, this is the ending rotation angle of the generated symmetric poses. |
Parameter Adjustment |
Define the upper limit of the angle range for symmetric generation. |
Parameter Range |
[0, 360.1], Default: 360, Unit: degrees |
|
|
|
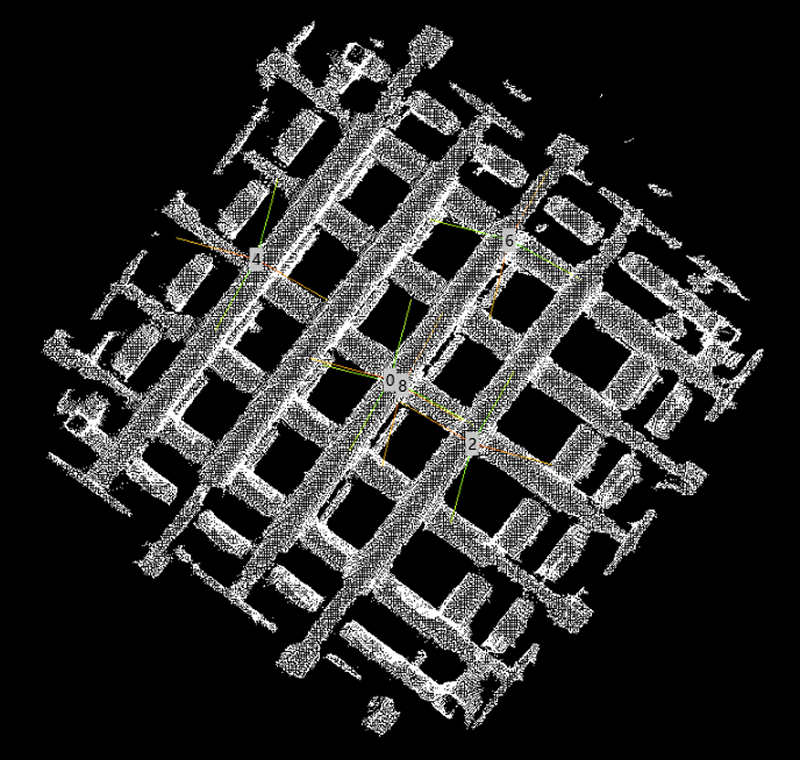
Maximum Angle=300 degrees |
Maximum Angle=330 degrees |
Maximum Angle=360 degrees |