🔷Point Cloud Edge Extraction - Ordered (Legacy)
Functional Description
This operator is specifically designed to extract edge points from input ordered point clouds with normals. It typically detects edges by comparing depth value (Z coordinate) differences between adjacent pixel points. It utilizes the ordered structure information of point clouds for computation. The operator can also choose whether to adjust output edge points' normal vector directions.
Usage Scenarios
-
Suitable for scenarios requiring compatibility with legacy workflows.
-
Depth Image Edge Detection: Extract edges formed by depth discontinuities, such as object contours or occlusion boundaries.
-
Ordered Point Cloud Feature Extraction: Quickly extract edges from ordered point clouds.
Input Output
Input |
Point Cloud with Normals: Input must be point clouds or point cloud lists with normal vector information and ordered structure. |
|
Output |
Point Cloud Edges: Point cloud list composed of extracted edge points (usually maintains ordered structure, non-edge points may be set to invalid values). |
|
Parameter Description
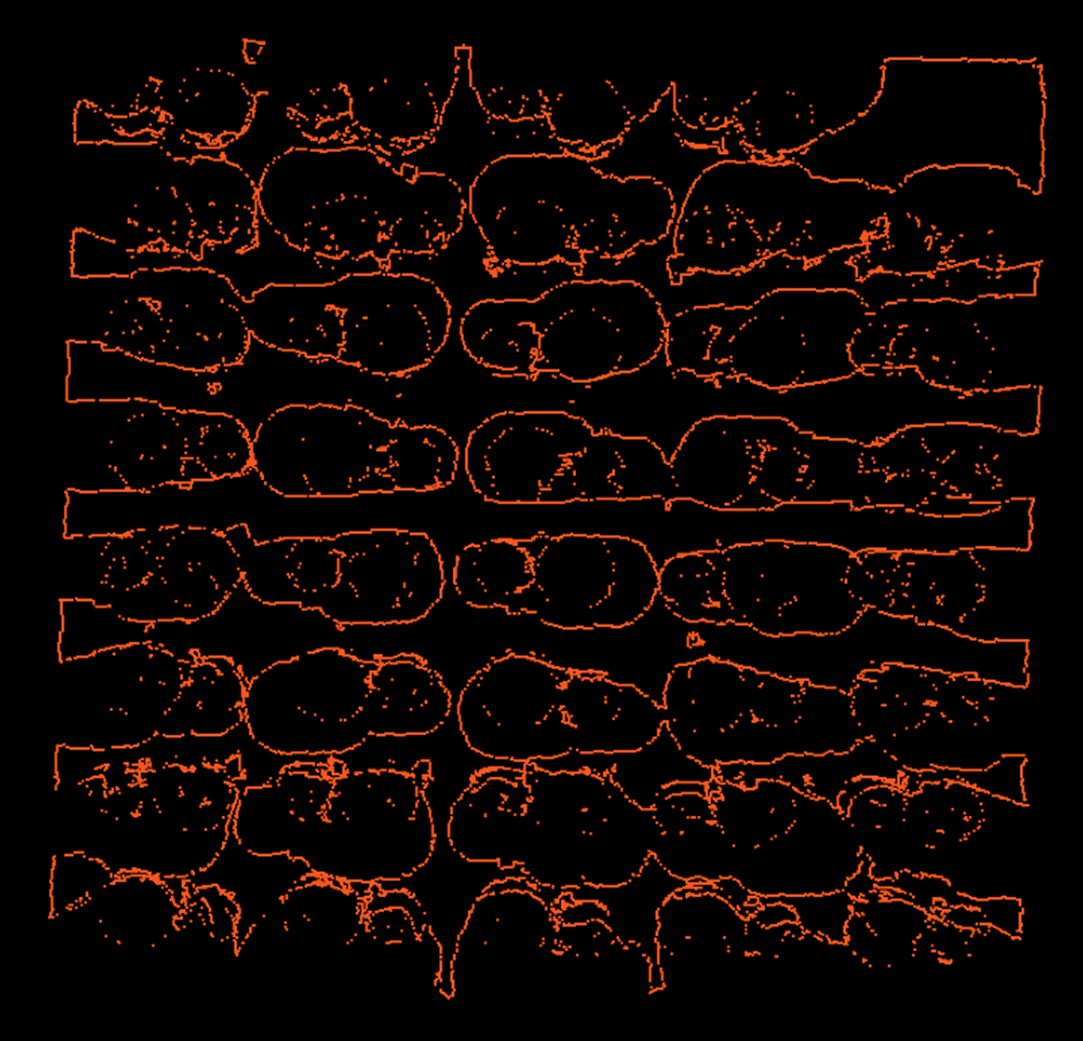
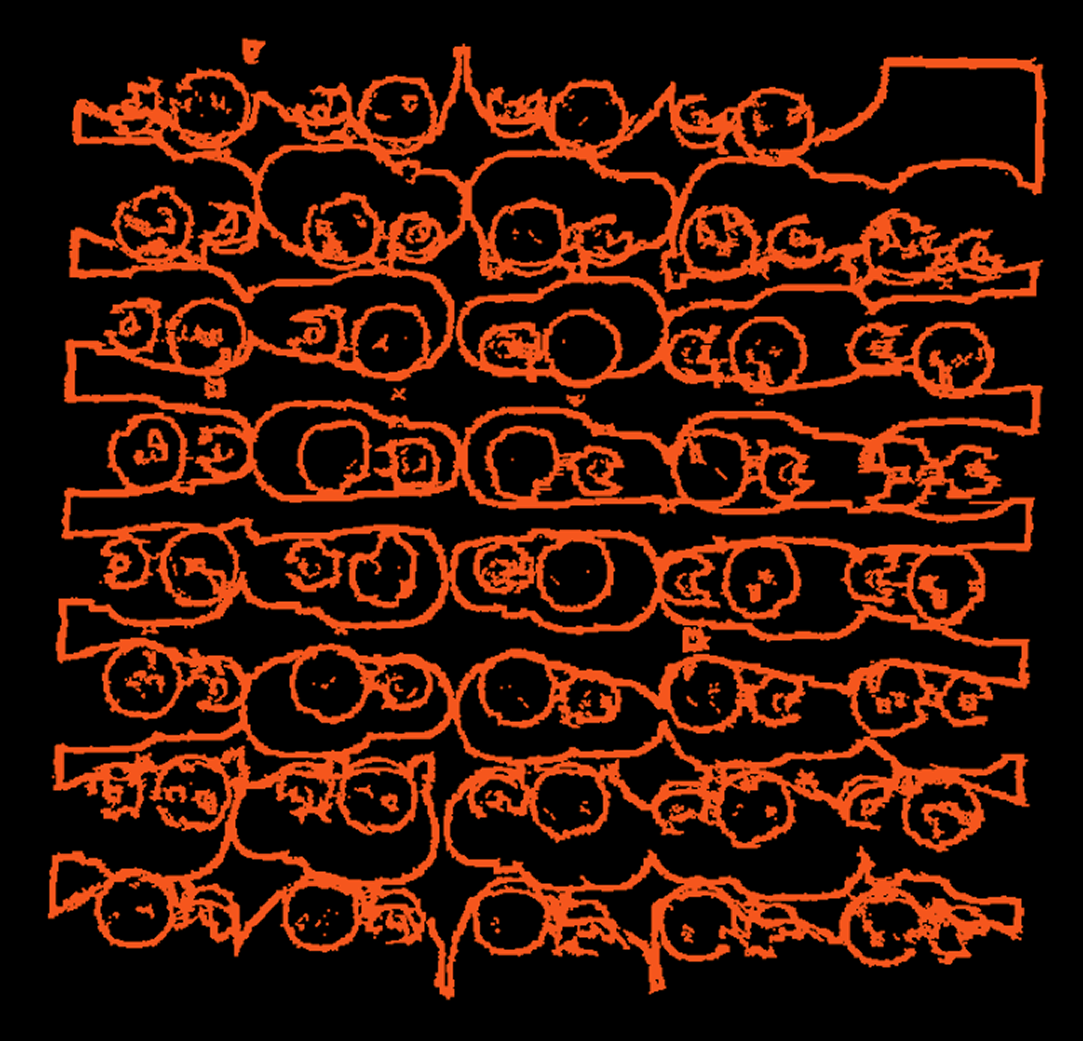
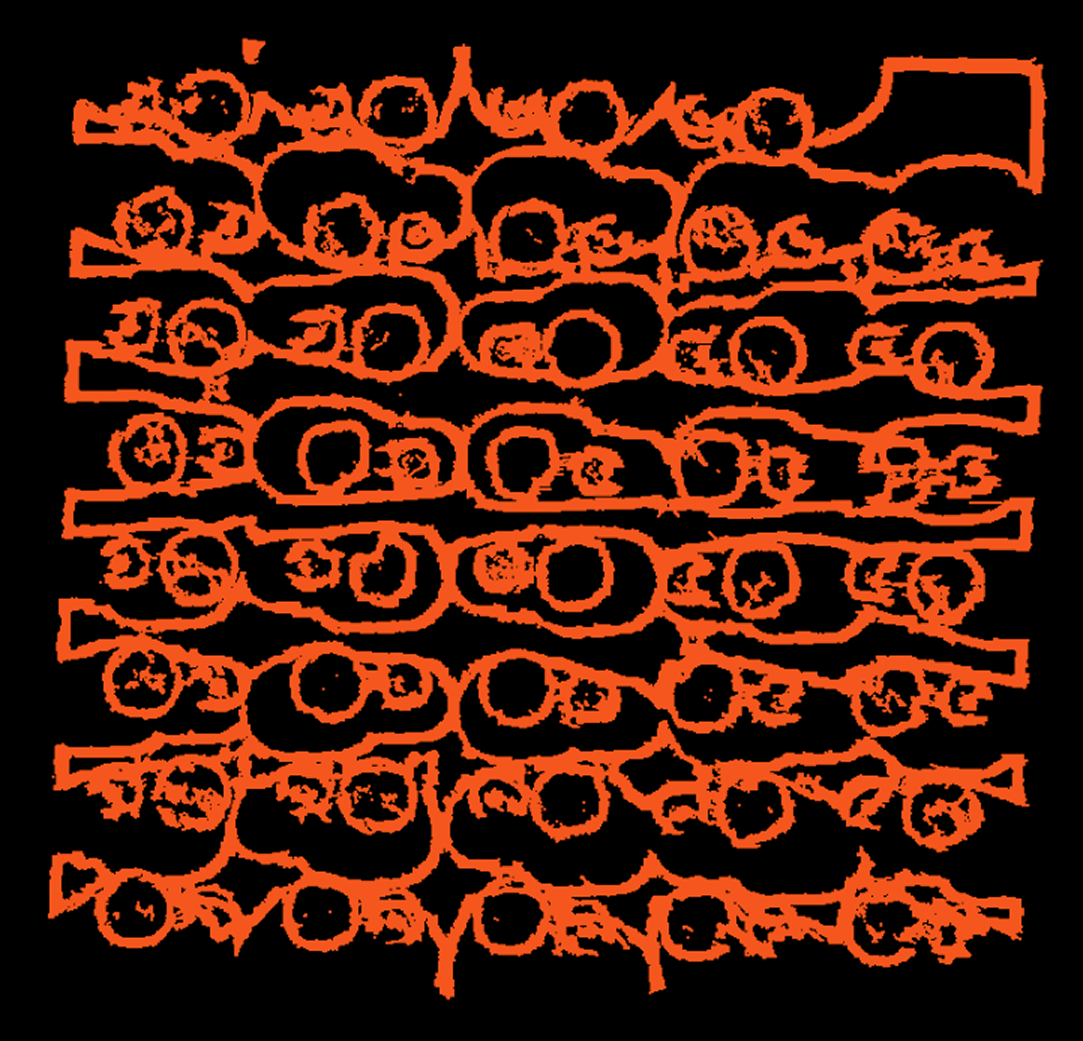
Minimum Edge Distance
Parameter Description |
Distance threshold for judging depth discontinuity. If the depth (usually Z coordinate) difference between adjacent points is greater than this value, an edge is considered to exist. |
Parameter Adjustment |
Set according to expected edge depth differences in the scene. Smaller values are sensitive to minor depth changes, larger values only detect more obvious depth changes. |
Parameter Range |
[0, 1000], Default value: 50 |
|
|
|
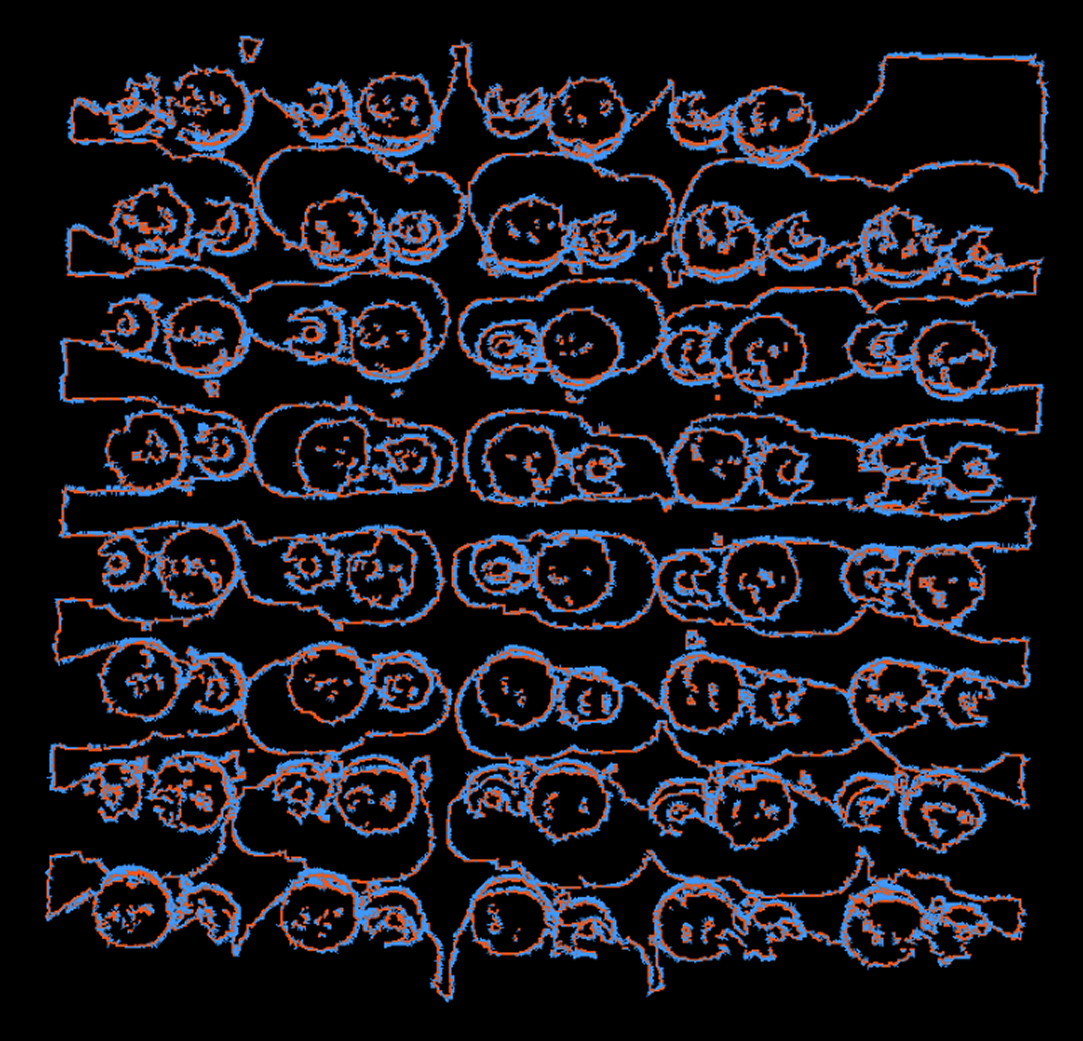
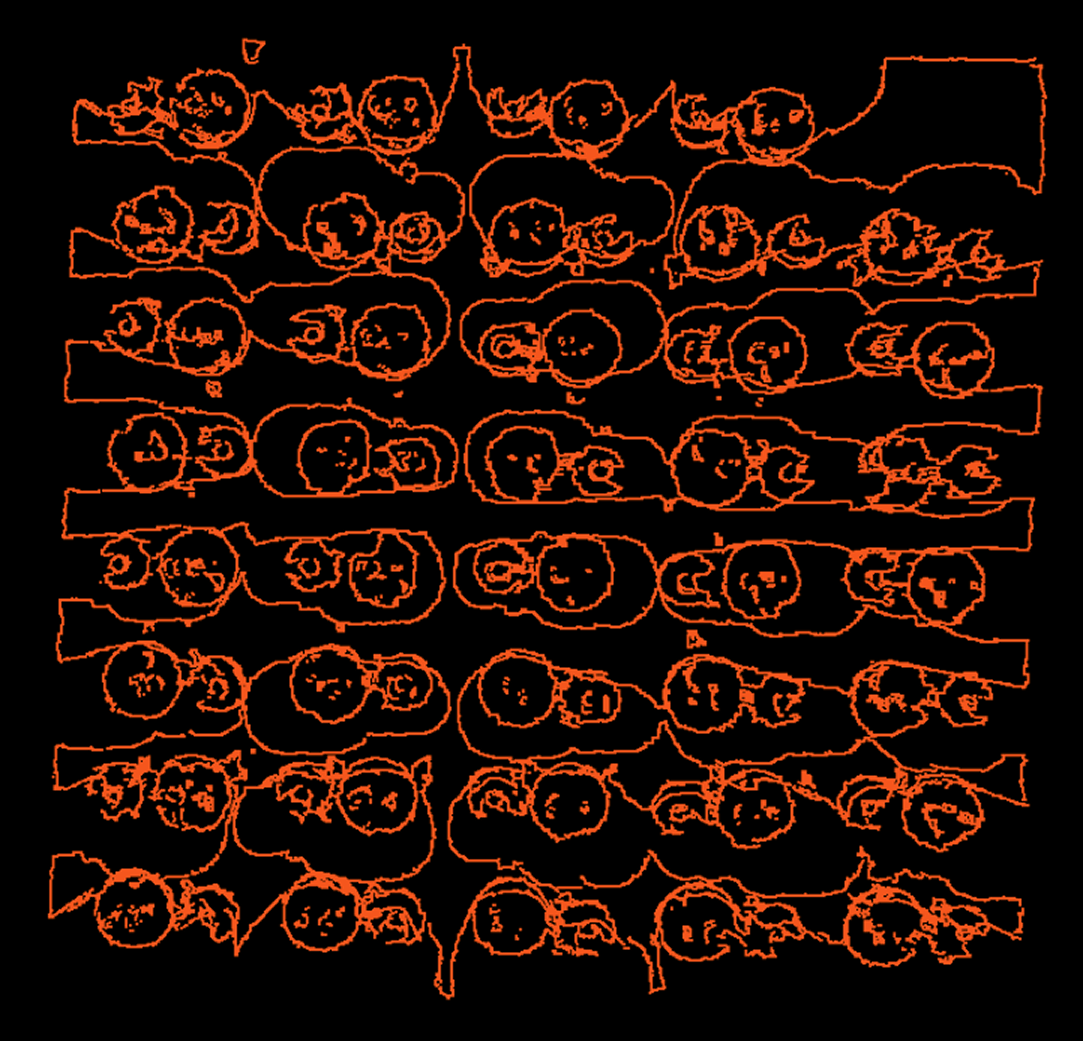
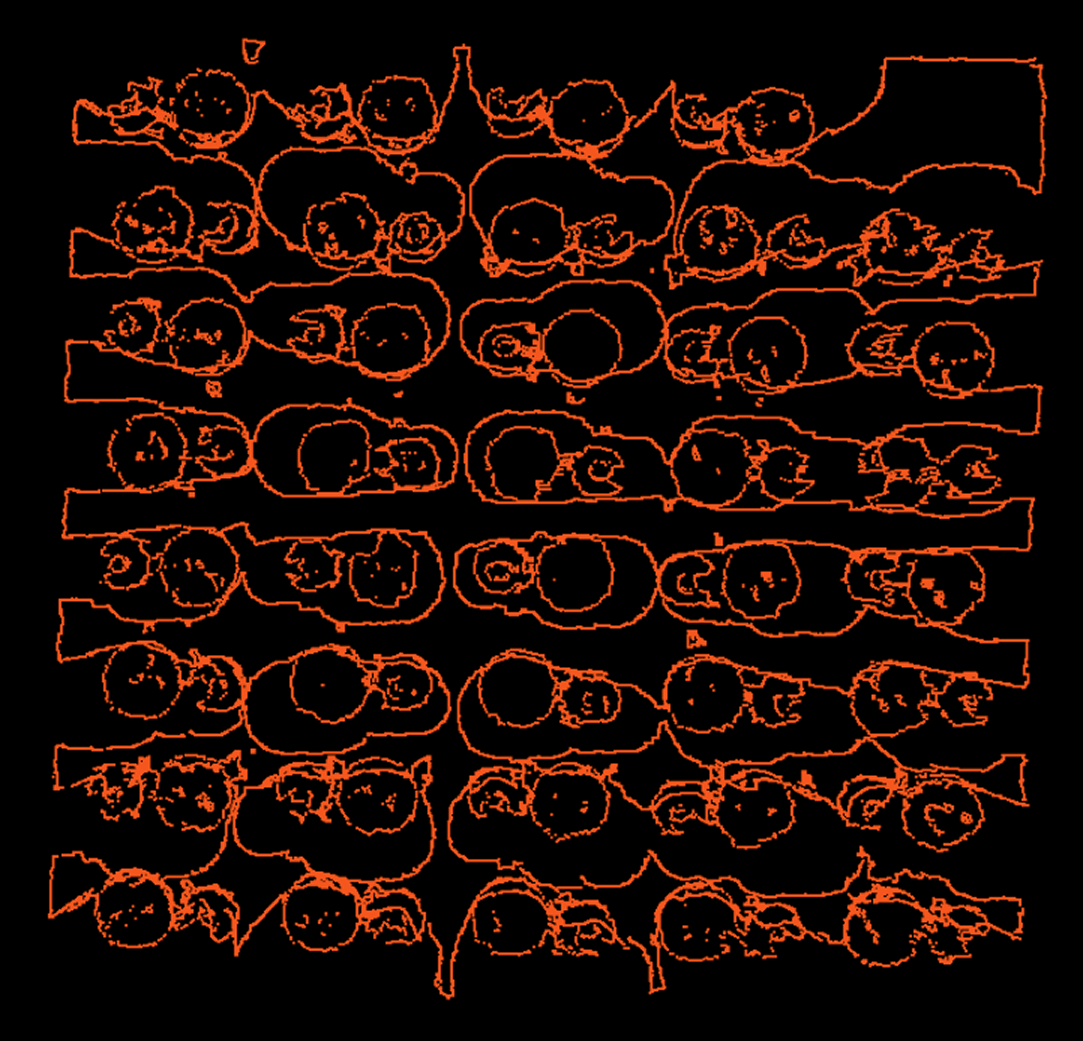
Minimum Edge Distance=50 |
Minimum Edge Distance=100 |
Minimum Edge Distance=200 |
Search Window Size
Parameter Description |
Window radius used for neighborhood comparison on ordered point cloud grid structure. For example, value 1 means comparing center point with its directly adjacent 8 points, forming 3x3 window. Window size = (2 × radius + 1) × (2 × radius + 1). |
Parameter Adjustment |
Defines local neighborhood range considered for edge judgment. Increasing this value will consider more distant neighbors, may make edges smoother. |
Parameter Range |
[0, 10000], Default value: 1 |
|
|
|
Search Window Size=1 |
Search Window Size=5 |
Search Window Size=10 |
Adjust Edge Normals
Parameter Description |
Choose whether to adjust normal vectors after extracting edge points. |
|
Parameter Adjustment |
On (Default): Recalculate and adjust normal vectors of identified edge points to make them as perpendicular as possible to edge direction and point in consistent direction (outward or inward). |
|
Off: Preserve original normal vectors of edge points. |
|
|