3D Precise Matching
Introduction
Function Description
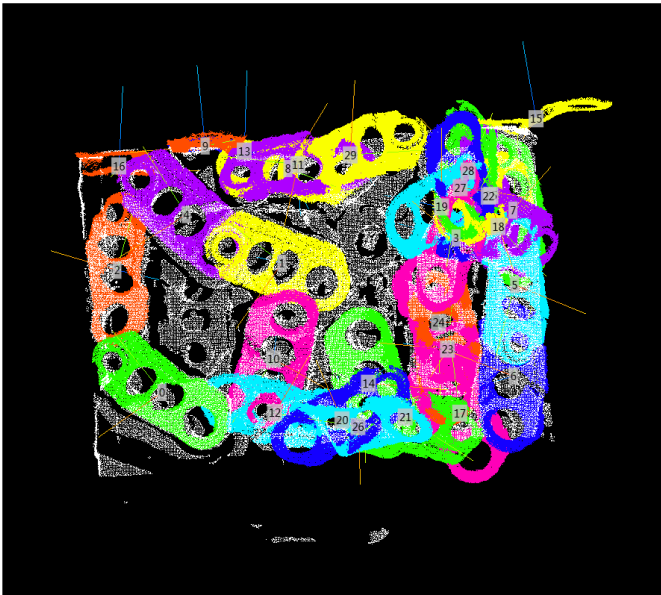
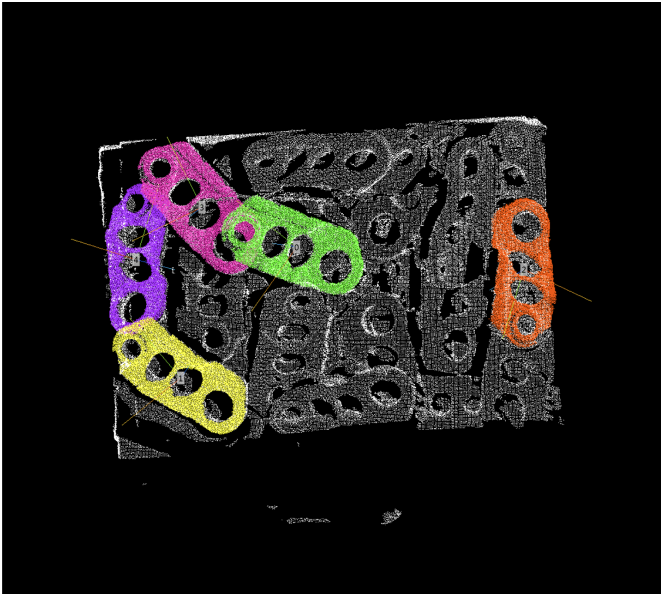
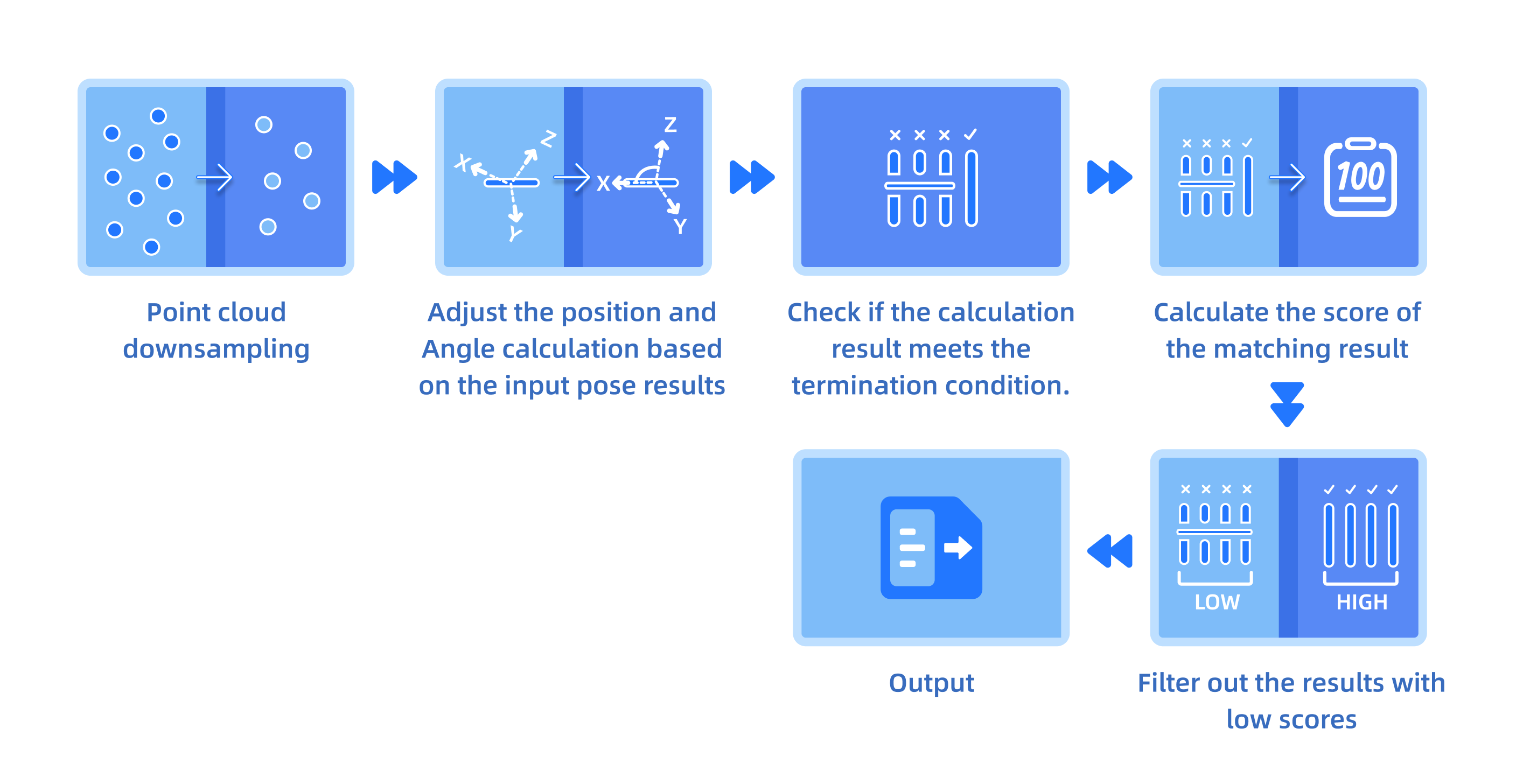
This operator performs high-precision matching calculations between the workpiece template point cloud and the scene point cloud based on the results output by other operators, and outputs the precise pose of the workpiece.
Parameter Description
Parameter Settings
Model point cloud file
Parameter Description |
This parameter can select a point cloud template from the matching model library through mapping parameters or directly upload a workpiece template point cloud file. The uploaded point cloud file can also be downloaded. |
Model Switching Method |
Click [Upload File] to open a pop-up window, select the point cloud file to upload directly, or switch through mapping parameters. |
Voxel downsampling size
Default Value |
5 |
Parameter Range |
0-100000 |
Recommended Value |
1, 2, 3, 5, 10 |
Parameter Description |
This parameter refers to the spacing between two adjacent voxel points. It performs downsampling on the template point cloud and scene point cloud involved in the matching calculation. The smaller the value, the more point clouds are involved in the calculation, and the higher the matching accuracy. |
Tuning Instructions |
If the matching result calculated with the default value has a large deviation, this parameter can be appropriately reduced; if the calculation time is long, this parameter can be appropriately increased. |
Confidence threshold
Default Value |
0.5 |
Parameter Range |
0-1 |
Recommended Value |
0.3, 0.5, 0.6, 0.8, 0.9 |
Parameter Description |
This parameter is used to filter results with low matching scores. |
Tuning Instructions |
If there are few matching results after filtering with the default value, this parameter can be appropriately reduced; if there are results with large matching deviations, this parameter can be appropriately increased. |
ICP search radius
Default Value |
100 |
Parameter Range |
0-100000 |
Recommended Value |
20, 30, 50, 100 |
Parameter Description |
This parameter refers to the search distance for points during matching calculation. |
Tuning Instructions |
This parameter is set according to the workpiece size, generally in the range of 0.1 to 1 times the workpiece diameter; if the workpiece size is small or the deviation of the coarse matching output result is not large, it can be appropriately reduced; if the workpiece size is large and the deviation of the coarse matching output result is also large, this parameter can be appropriately increased. |
ICP score effective distance
Default Value |
5 |
Parameter Range |
0-100000 |
Recommended Value |
1, 3, 5, 10 |
Parameter Description |
This parameter refers to the search range for whether a point in the point cloud template corresponds to a point in the scene; if a corresponding point for a template point can be found in the scene within this parameter range, this corresponding point is called an effective point. The more effective points, the higher the matching score. |
Tuning Instructions |
The value of this parameter should be greater than the value of the "Voxel downsampling size" parameter. The larger the parameter value, the higher the matching score, and generally no adjustment is needed; if the "Voxel downsampling size" parameter is small (e.g., 1), and the difference between the scores of correct and incorrect matching results is small, making it impossible to filter out incorrect results, this parameter can be appropriately reduced to widen the matching score difference (the scores of incorrect results will decrease more), thereby filtering out incorrect results. |
Turn on to remove overlapping
Default Value |
Enabled by default |
Recommended Value |
None |
Parameter Description |
This parameter is used to handle cases where one workpiece matches multiple results. It removes results with low scores based on the matching score, retaining only the results with high scores. |
Tuning Instructions |
Enabled by default, generally this parameter is not adjusted. |
Leverage clustered poses
Default Value |
Enabled by default |
Recommended Value |
None |
Parameter Description |
This parameter means that after a scene point cloud is segmented into multiple point cloud blocks, each block is matched separately. This can effectively reduce interference from point clouds outside the workpiece and improve accuracy and calculation time. |
Tuning Instructions |
Enabled by default, generally this parameter is not adjusted. |
Mobile coordinate system origin
Default Value |
Disabled by default |
Recommended Value |
None |
Parameter Description |
This parameter refers to moving the point cloud coordinate system to the position of the geometric center of the template point cloud. |
Tuning Instructions |
If the pose input to the "3D Precise Matching" operator is calculated by "Extract Point Cloud Center Pose", and the "Align Point Cloud Center" operation was not performed when creating the template, this parameter needs to be enabled for matching calculation. |
Advanced Parameters
ICP early termination distance condition
Default Value |
0.1 |
Parameter Range |
0-1000 |
Recommended Value |
0.1, 0.2, 0.3 |
Parameter Description |
This parameter is used to determine whether to end the matching calculation prematurely. The smaller the value, the smaller the matching distance deviation; when the distance between the workpiece template coordinates and the matched result pose is less than this value, the algorithm considers that the distance accuracy requirement is met, and if the rotation accuracy is also met, the matching calculation is ended prematurely. |
Tuning Instructions |
Generally, this parameter is not adjusted. If the matching translation distance deviation is large, it can be appropriately reduced; if the calculation time is long, this parameter can be appropriately increased. |
ICP early termination rotation condition
Default Value |
0.1 |
Parameter Range |
0-10 |
Recommended Value |
0.1, 0.2, 0.3 |
Parameter Description |
This parameter is used to determine whether to end the matching calculation prematurely. The smaller the value, the smaller the matching rotation deviation; when the rotation angle difference between the workpiece template coordinates and the matched result pose is less than this value, the algorithm considers that the rotation accuracy requirement is met, and if the distance accuracy is also met, the matching calculation is ended prematurely. |
Tuning Instructions |
Generally, this parameter is not adjusted. If the matching rotation deviation is large, it can be appropriately reduced; if the calculation time is long, this parameter can be appropriately increased. |
ICP maximum number of iterations
Default Value |
20 |
Parameter Range |
0-500 |
Recommended Value |
20, 30, 50, 100 |
Parameter Description |
This parameter refers to the maximum number of precise matching calculations. When the number of precise matching calculations reaches this value and the early termination condition is not met, the calculation also stops; if the precise matching calculation meets the early termination condition, the calculation also stops, and the number of calculations at this time is less than this value. |
Tuning Instructions |
If the matching deviation is large, this parameter can be appropriately increased to increase the number of matching calculations and improve accuracy; if the calculation time is long, this parameter can be appropriately reduced. |
Parameter Tuning Experience Sharing
How to Improve 3D Precise Matching Calculation Accuracy
"3D Precise Matching" is the final calculation result output, and its calculation accuracy directly affects the grasping accuracy. Therefore, the calculation accuracy of "3D Precise Matching" is very important. The parameters that mainly affect the matching accuracy of the "3D Precise Matching" operator are "Voxel downsampling size" and "ICP search radius", followed by "ICP maximum number of iterations".
-
"Voxel downsampling size" directly affects matching accuracy. First, try to reduce this parameter value to improve matching accuracy; . If the matching effect is not good, then adjust the "ICP search radius" parameter. For small workpieces (e.g., workpiece size 100mm), reduce it; for large workpieces, increase it (e.g., workpiece size 1000mm);
-
If the effect is still not good after adjusting the above two parameters, then open the advanced parameters and increase the "ICP maximum number of iterations";
-
If a single precise matching parameter adjustment cannot meet the matching accuracy, you can add another "3D Precise Matching" operator to perform higher-precision matching calculations based on the results of the previous precise matching (multiple precise matching operators can be added).
How to Filter Incorrect Matching Results
Matching results are filtered by the "Confidence threshold" parameter. The matching score is directly related to the "ICP score effective distance". If you want to retain correct results, adjust the "Confidence threshold" and "ICP score effective distance" parameter values.
-
Directly adjust the "Confidence threshold". You need to confirm the score of the current matching result. The threshold should be 10%~20% larger than the matching score of the incorrect result;
-
If the score difference between correct and incorrect matching results is not large, reduce the "ICP score effective distance", and then appropriately reduce the "Confidence threshold" parameter based on the current matching score; if the score of the correct matching result is low, increase the "ICP score effective distance", and then appropriately increase the "Confidence threshold" parameter based on the current matching score.