🔷Point Cloud Edge Extraction
Functional Description
This operator is used to extract edge points from input point clouds with normals. It identifies edges by analyzing the normal vector direction differences between each point in the point cloud and its neighboring points. If the maximum angle difference between a point and its K nearest neighboring points' normal vectors exceeds the set "Edge Angle Threshold", that point is identified as an edge point. This operator can automatically handle both ordered and unordered point clouds with normals.
Usage Scenarios
-
Feature Extraction: Extract contours or geometric edges of point clouds for shape matching, recognition, or measurement.
-
Point Cloud Segmentation Assistant: Edge information can help segment regions with distinct boundaries.
-
Visualization: Highlight object contours and structural features.
Input Output
Input |
Point Cloud with Normals: Input must be point clouds or point cloud lists containing normal vector information. |
|
Output |
Point Cloud Edges: Point cloud list composed of extracted edge points. Output point cloud contains only points identified as edges and preserves their original coordinate and normal vector information. |
|
Parameter Description
Edge Angle Threshold
Parameter Description |
Normal vector angle difference threshold for determining whether a point is an edge point. |
Parameter Adjustment |
The operator calculates angle differences between each point and its K neighboring points' normal vectors. If the maximum value among these angle differences exceeds the threshold set here, that point is considered an edge point.
|
Parameter Range |
[0, 180], Default value: 90, Unit: degrees |
|
|
|
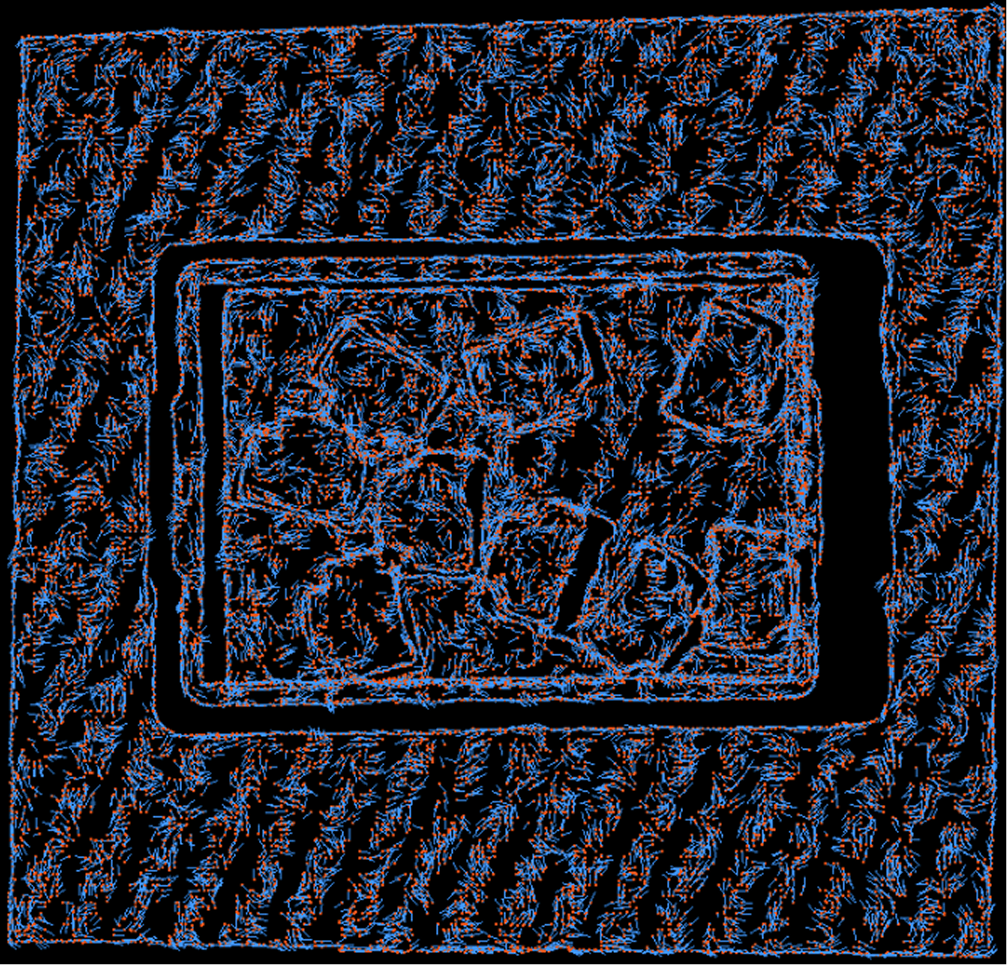
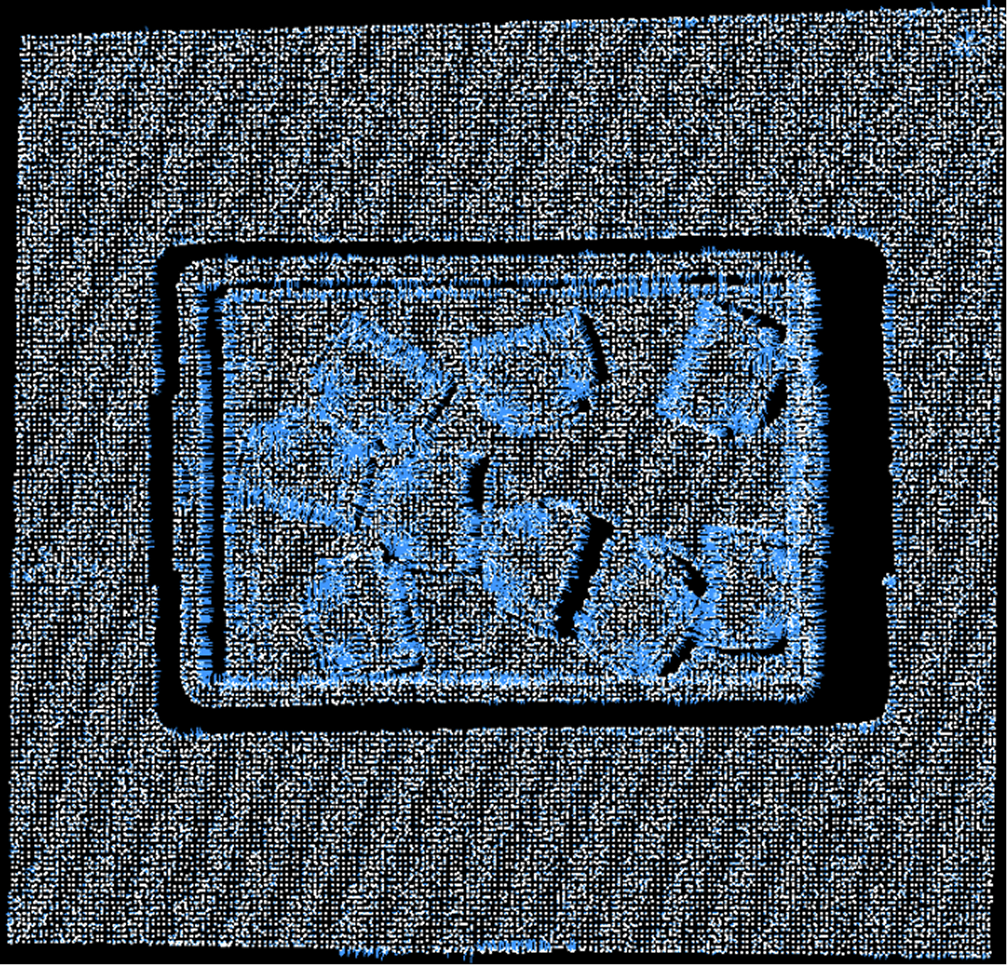
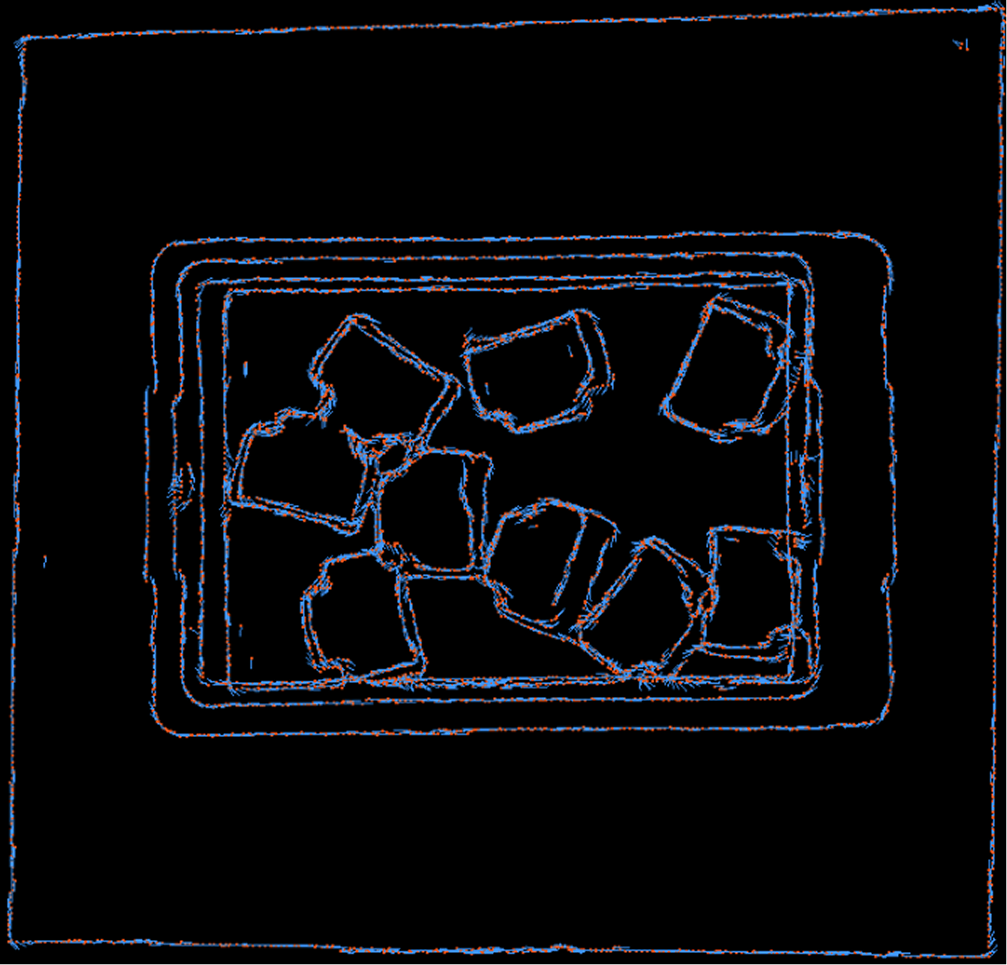
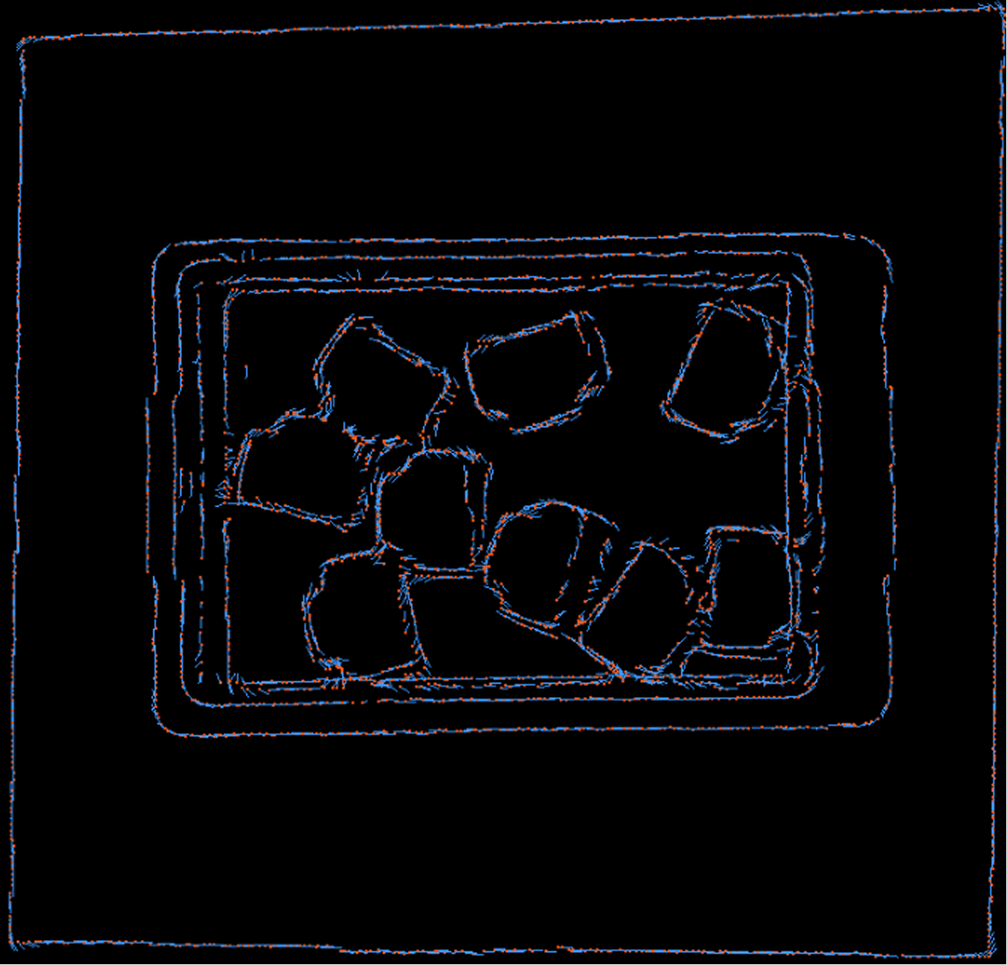
Edge Angle Threshold=60 |
Edge Angle Threshold=90 |
Edge Angle Threshold=150 |
Neighbor Search Count
Parameter Description |
Number of nearest neighboring points considered when calculating normal angle differences for each point. |
Parameter Adjustment |
Neighbor search count defines the local neighborhood size referenced for edge judgment, need to select based on point cloud density and expected edge scales to capture.
|
Parameter Range |
[0, 100000], Default value: 20 |
|
|
|
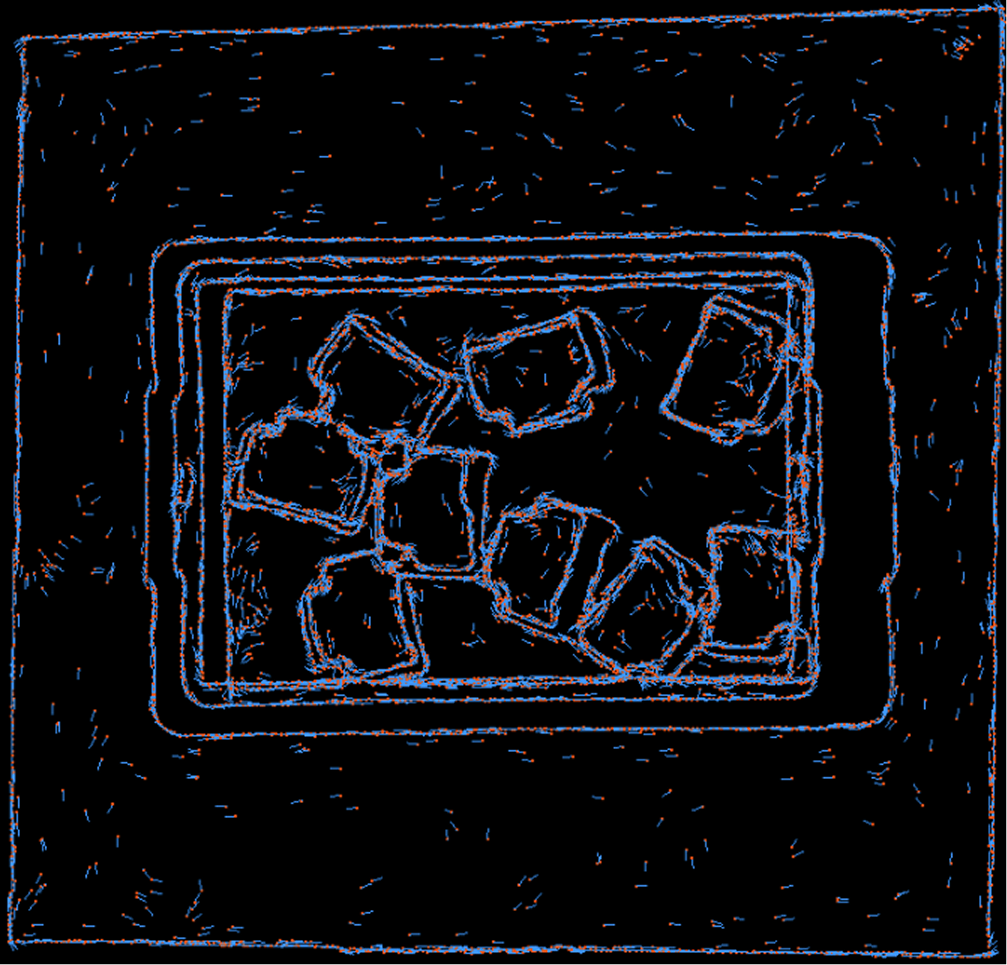
Neighbor Search Count=10 |
Neighbor Search Count=20 |
Neighbor Search Count=200 |