🔷Point Cloud Edge Extraction (Meridional Scanning Method)
Function Description
This operator extracts the external contour edge points of the input point cloud on the XOY plane through a "scan line" approach. First, it determines the range of the point cloud on the X-axis and Y-axis, then divides the X-axis range into several intervals according to the set "resolution" parameter, finding the points with maximum and minimum Y coordinates within each interval; similarly, it divides the Y-axis range into intervals and finds the points with maximum and minimum X coordinates within each interval. Finally, all these found maximum/minimum points are merged together as the extracted edge point cloud.
This method is mainly used to extract the outermost contour of point cloud projection on the XOY plane, particularly suitable for point clouds whose shape approximates a plane and whose main projection surface is close to the XOY plane.
Usage Scenarios
-
Extract Planar Contours: Obtain external boundaries of flat objects (such as plates, components) on the XOY plane.
-
Obtain 2D Envelopes: Get the approximate envelope range of point clouds on a two-dimensional plane.
-
Simplify Edge Representation: For application scenarios with complex internal structures but only requiring external contours.
Input Output
Input |
Point cloud: Input point cloud or point cloud list. |
|
Output |
Point cloud edges: List of point clouds composed of extracted edge points. |
|

Parameter Description
|
This operator has two versions:
Both have identical core functionality and parameters, differing only in the type of point cloud data processed. |
Resolution
Parameter Description |
The number of scanning segments in the X-axis and Y-axis directions, determining the fineness of scanning. |
Parameter Adjustment |
|
Parameter Range |
[0, 1000], default: 100 |
|
|
|
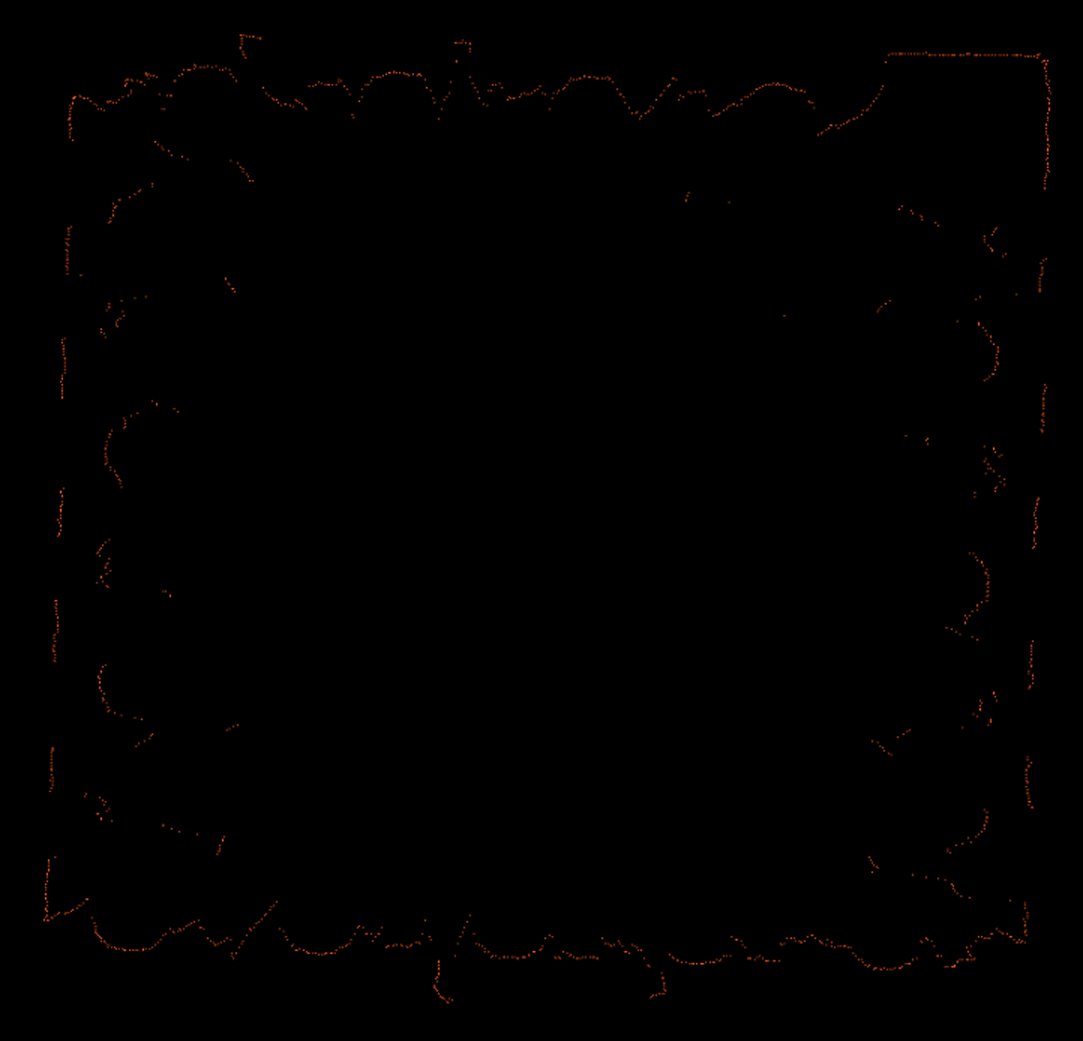
Resolution=500 |
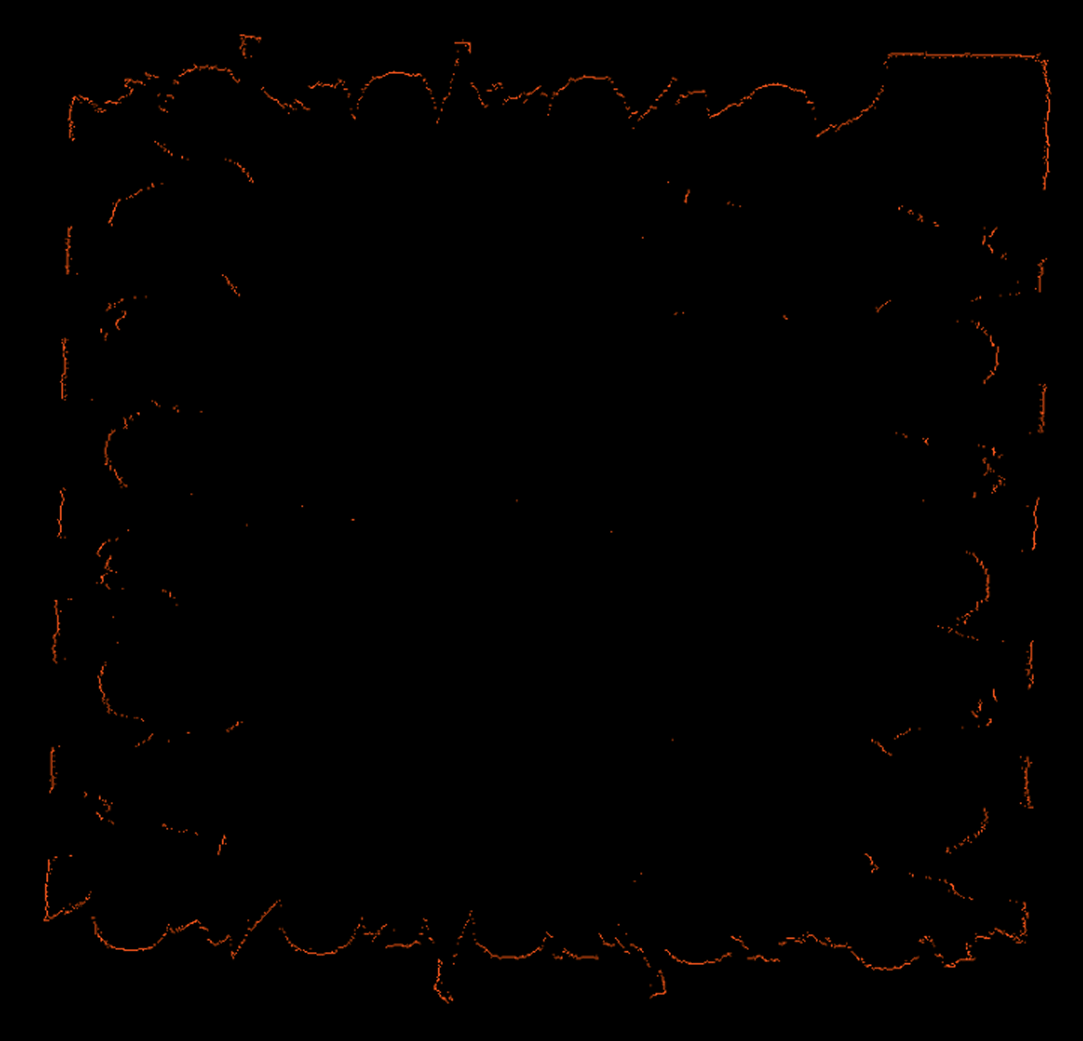
Resolution=800 |
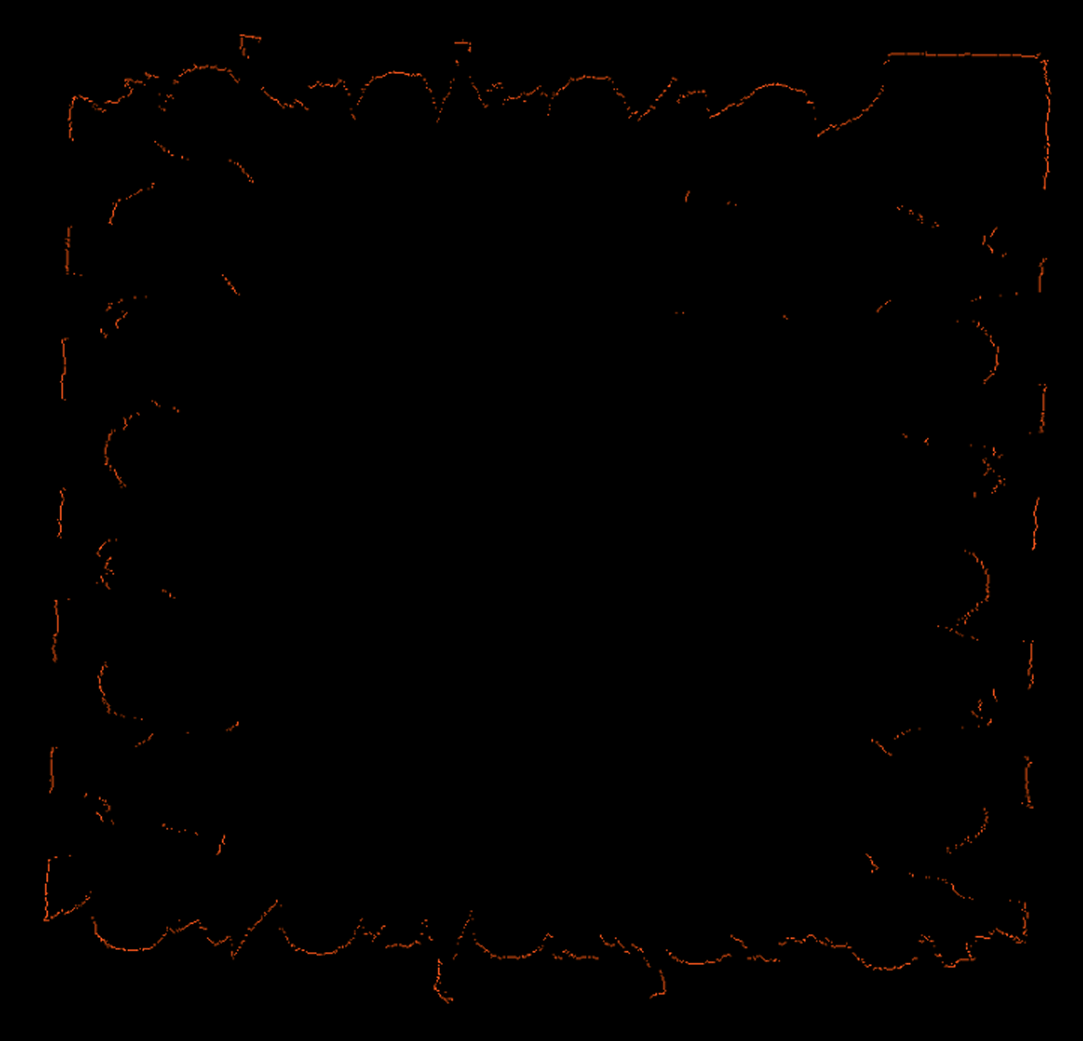
Resolution=1000 |