🔷Euclidean Clustering Point Cloud Segmentation
Function Description
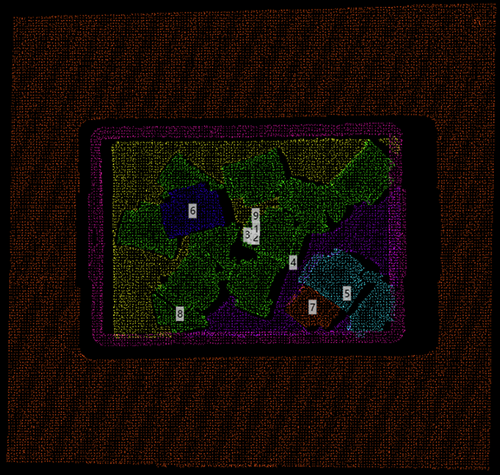
This operator performs clustering segmentation on input point clouds based on the Euclidean distance between points. It aggregates spatially adjacent points into independent clusters. If a point’s distance to any point in an existing cluster is less than the set "search radius", or if it can connect to a point within the radius, then this point is assigned to that cluster. The operator finally outputs a point cloud list where each point cloud represents a segmented cluster.
Usage Scenarios
-
Instance segmentation: Segmenting physically separated objects in a scene into independent point cloud clusters. For example, segmenting multiple parts on a conveyor belt, or multiple cups on a table.
-
Noise removal: By setting the "minimum points per cluster", it can effectively filter out point cloud clusters with too few points, which may be background noise or sensor error-generated points.
-
Point cloud preprocessing: Before performing tasks such as object recognition and pose estimation, segmenting raw point clouds or ROI point clouds into units representing different objects.
-
Very similar functionality to the "Connected Component Segmentation" operator, both typically utilize spatial proximity for clustering.
Input Output
Input |
Point clouds: Input point cloud or point cloud list to be segmented. |
|
Output |
Segmented point clouds: Point cloud cluster list obtained after segmentation. |
|
Parameter Description
|
This operator has two versions:
Both have identical core functionality and parameters, differing only in the point cloud data types they process. |
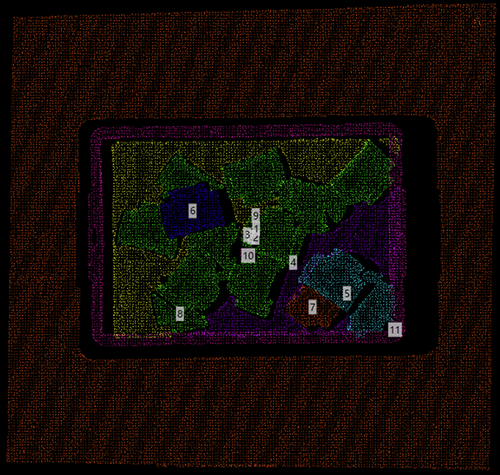
Search Radius
Parameter Description |
Defines the maximum distance threshold within which a point can be added to a cluster during the clustering process. This is also the search radius for finding neighboring points. |
Parameter Adjustment |
|
Parameter Range |
[0, 200], default value: 5, unit: mm |
|
|
|
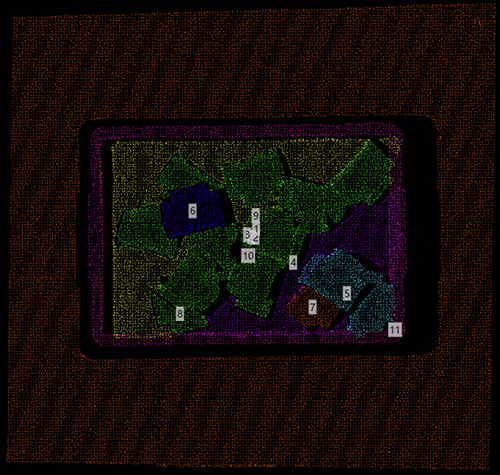
Search radius=5mm |
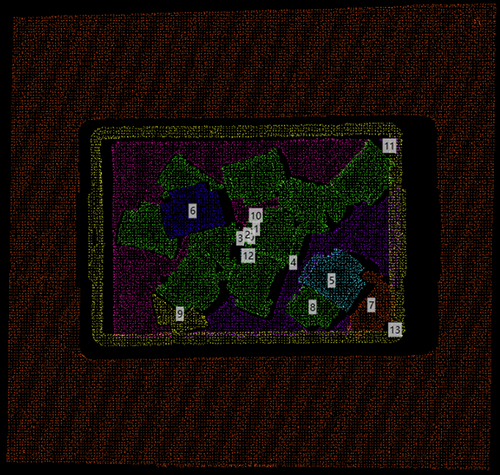
Search radius=10mm |
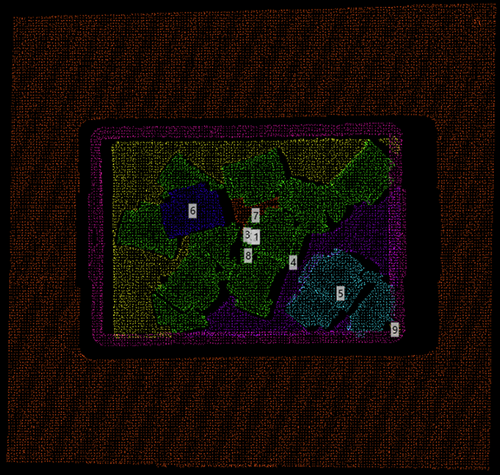
Search radius=15mm |

Minimum Points per Cluster
Parameter Description |
The minimum number of points that a valid cluster must contain. |
Parameter Adjustment |
Used to filter out overly small point cloud clusters. Increasing this value can remove more small clusters (usually considered noise), but if set too large, it may filter out small but valid objects. |
Parameter Range |
[1, 4000000], default value: 100 |
|
|
|
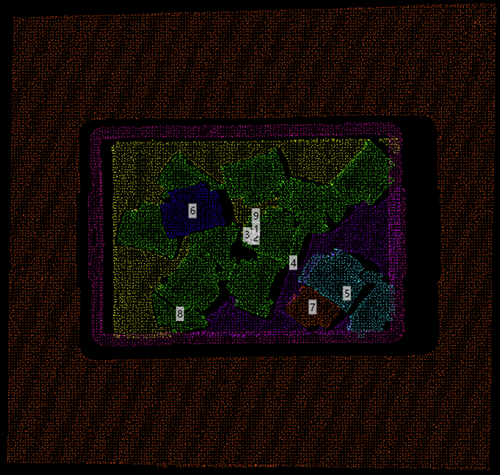
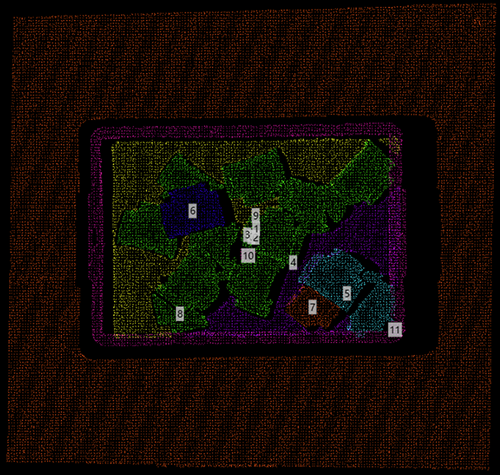
Minimum points per cluster=20 |
Minimum points per cluster=100 |
Minimum points per cluster=1000 |
Maximum Points per Cluster
Parameter Description |
The maximum number of points that a valid cluster is allowed to contain. |
Parameter Adjustment |
Used to filter out overly large point cloud clusters. Suitable for scenarios where background, ground, or other oversized clustering results need to be excluded. Usually keep the default value (a very large number) unless there are special requirements. |
Parameter Range |
[1, 4000000], default value: 4000000 |
|
|
|
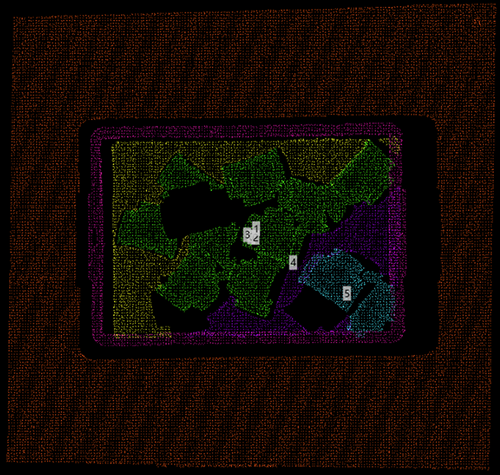
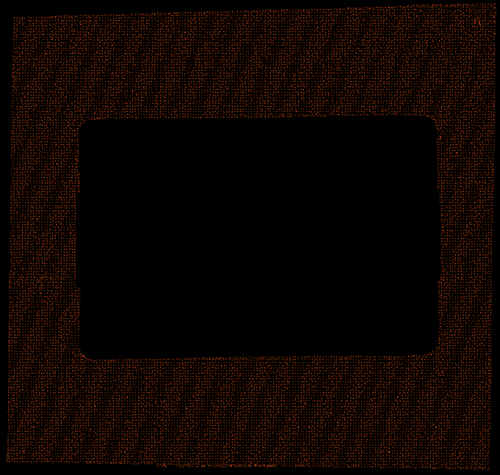
Maximum points per cluster=2000 |
Maximum points per cluster=5000 |
Maximum points per cluster=4000000 |
Keep All Results
Parameter Description |
Determines whether to output all clustering results that meet the size criteria. |
Parameter Adjustment |
|
Number of Results to Keep
Parameter Description |
Takes effect when "Keep All Results" is set to disabled. Specifies the number of clusters with the most points to keep. |
Parameter Adjustment |
The operator will first sort all segmentation results by point cloud count from largest to smallest. Setting this parameter to N will output only the top N point cloud clusters after sorting. For example, setting it to 1 means only outputting the cluster with the most points. |
Parameter Range |
[1, 1000], default value: 1 |
|
|
|
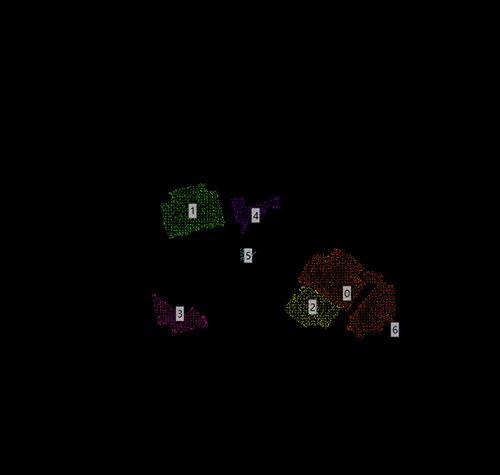
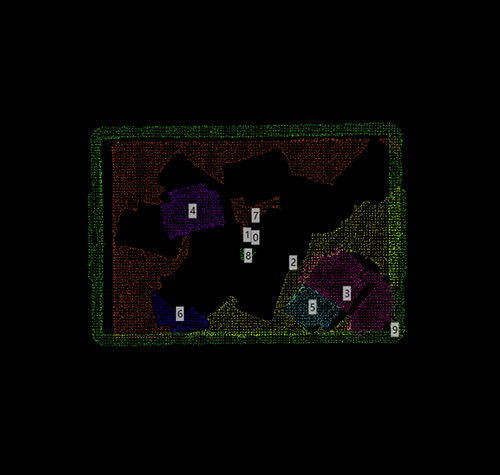
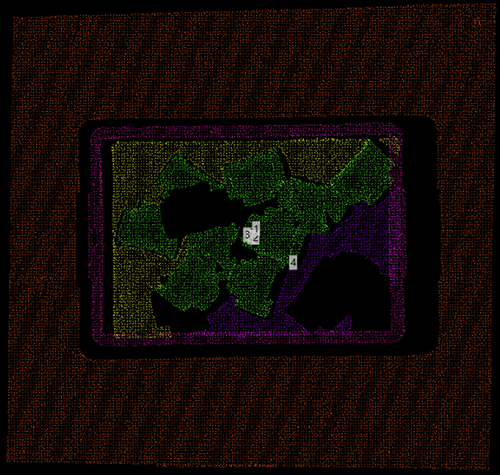
Number of results to keep=1 |
Number of results to keep=5 |
Number of results to keep=10 |
Sort Results
Parameter Description |
Determines whether to sort the final output point cloud cluster list by point cloud count from largest to smallest. |
Parameter Adjustment |
If subsequent processing depends on the size order of point cloud clusters, this option should remain enabled. |