ツールボックスインターフェース
メインインターフェースで ツールボックス をクリックして、ツールボックスインターフェースに入ります。このインターフェースでは、「幾何点群生成」、「3D回転変換計算」、「TCP逆算ツール」を利用できます。
ジオメトリ点群生成画面
ジオメトリ点群生成ツールは、球体、円柱、円環、梯形、立方体などの規則的なジオメトリ体の点群モデルを作成するためのツールです。これらのモデルは、ワークピースの点群マッチングテンプレートの作成に使用できます。
ツールライブラリ画面でジオメトリ点群生成をクリックして、ジオメトリ点群生成ツール画面に入ります。この画面は以下の三部分で構成されています:
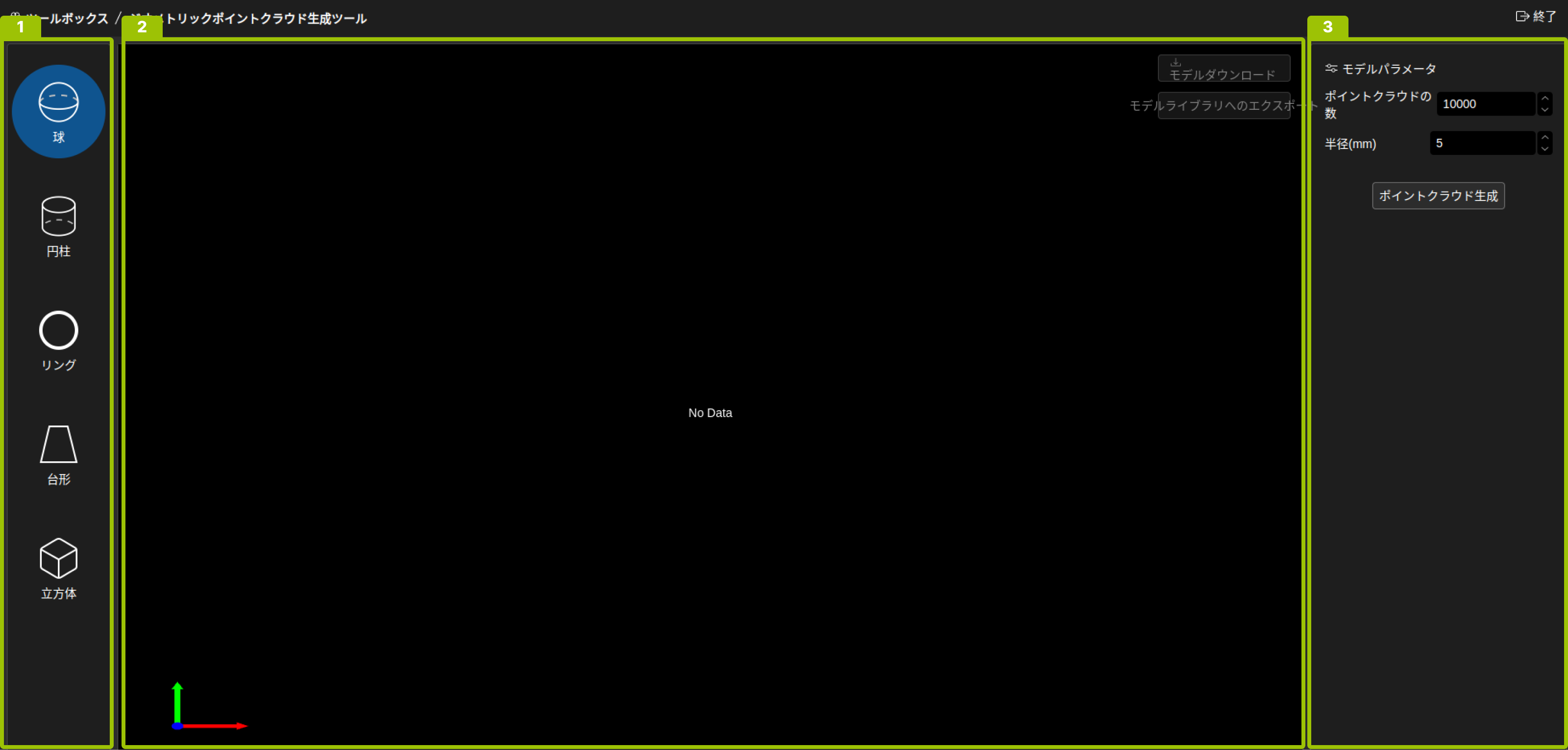
番号 |
エリア |
説明 |
|---|---|---|
1 |
モデルタイプ選択エリア |
このエリアでジオメトリタイプを選択できます。選択できるタイプには、球、円柱、トーラス、台形、立方体があります。トーラス生成では、内径が0の円を生成することをサポートします。立方体生成では、高さが0の長方形の平面を生成することをサポートします。 |
2 |
モデル表示エリア |
このエリアで生成された点群モデルを表示し、モデルのダウンロードやエクスポートを行います。 |
3 |
モデルパラメーター設定エリア |
このエリアでジオメトリ体の各種パラメーターを設定します。 |

