添加抓取路径起始点
-
抓取路径起始点位姿不能直接通过自身参数进行设置,而是需要通过设置机器人位姿来实现,所以在添加抓取路径起始点时,可先设置机器人位姿:
-
打开参数设置面板,在机器人参数中打开机器人工具控制器并选择工具。
-
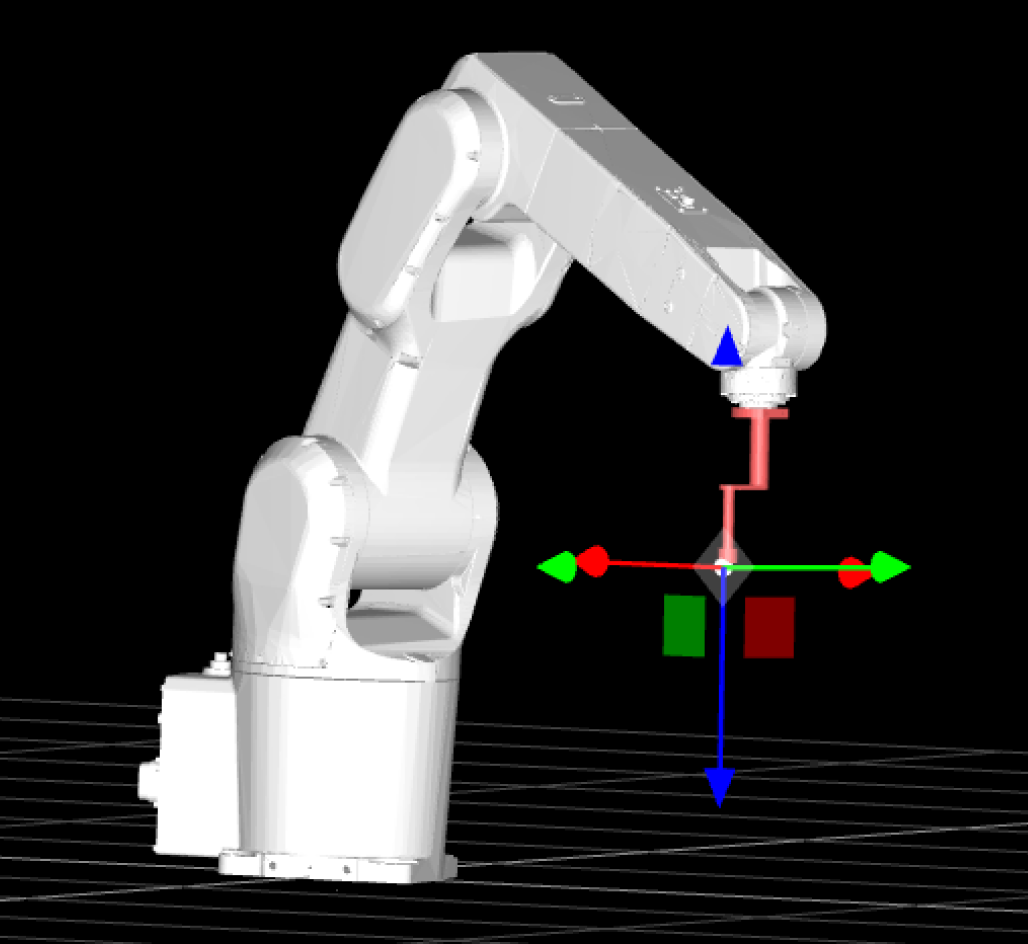
按住键盘 Shift ,鼠标左键拖动控制器将其运动到目标位置,在路径规划面板下点击路径点右侧
 图标,更新起始点位姿。
图标,更新起始点位姿。
-
-
添加抓取路径起始点:
-
单击抓取路径起始点条目右侧的+。
-
在弹窗中输入抓取路径起始点的名称,单击确认,抓取路径起始点将在TCP处生成。

起始点生成前
起始点生成后
此外:
若要设置多个起始点,请重新设置机器人位姿,然后添加起始点。新的起始点将在TCP处生成;如果未修改机器人位姿,新的起始点将与原起始点重叠。
-
-
设置抓取路径起始点模型参数(可选)。
-
在抓取路径起始点名称右侧单击
 图标。
图标。 -
在 详情 弹窗中可以对抓取路径起始点进行重命名、修改颜色、设置大小、不透明度和坐标轴长度等操作,并查看起始点的位姿信息。
此外:
-
若要调整起始点位姿,您需要重新设置机器人位姿,然后单击
图标,更新起始点位姿到机器人TCP上。 -
若不调整起始点位姿,您可单击
 图标,使机器人模型移动至该起始点。
图标,使机器人模型移动至该起始点。 -
若要删除该起始点,单击起始点名称右侧的
 图标。
图标。
-
-
什么是预抓取点
预抓取点是机械臂在到达最终抓取目标位置之前的一个中间姿态位置,通常被设定在料框顶部或用户自定义的安全位置,目的是确保机器人能够沿着一条安全、高效的路径接近目标物体,避免与周围环境发生碰撞。
添加预抓取点
-
单击预抓取点条目右侧的+。
-
在弹窗中输入抓取路径起始点的名称,调整偏移方向、偏移距离、碰撞检测步长后,单击确认。
-
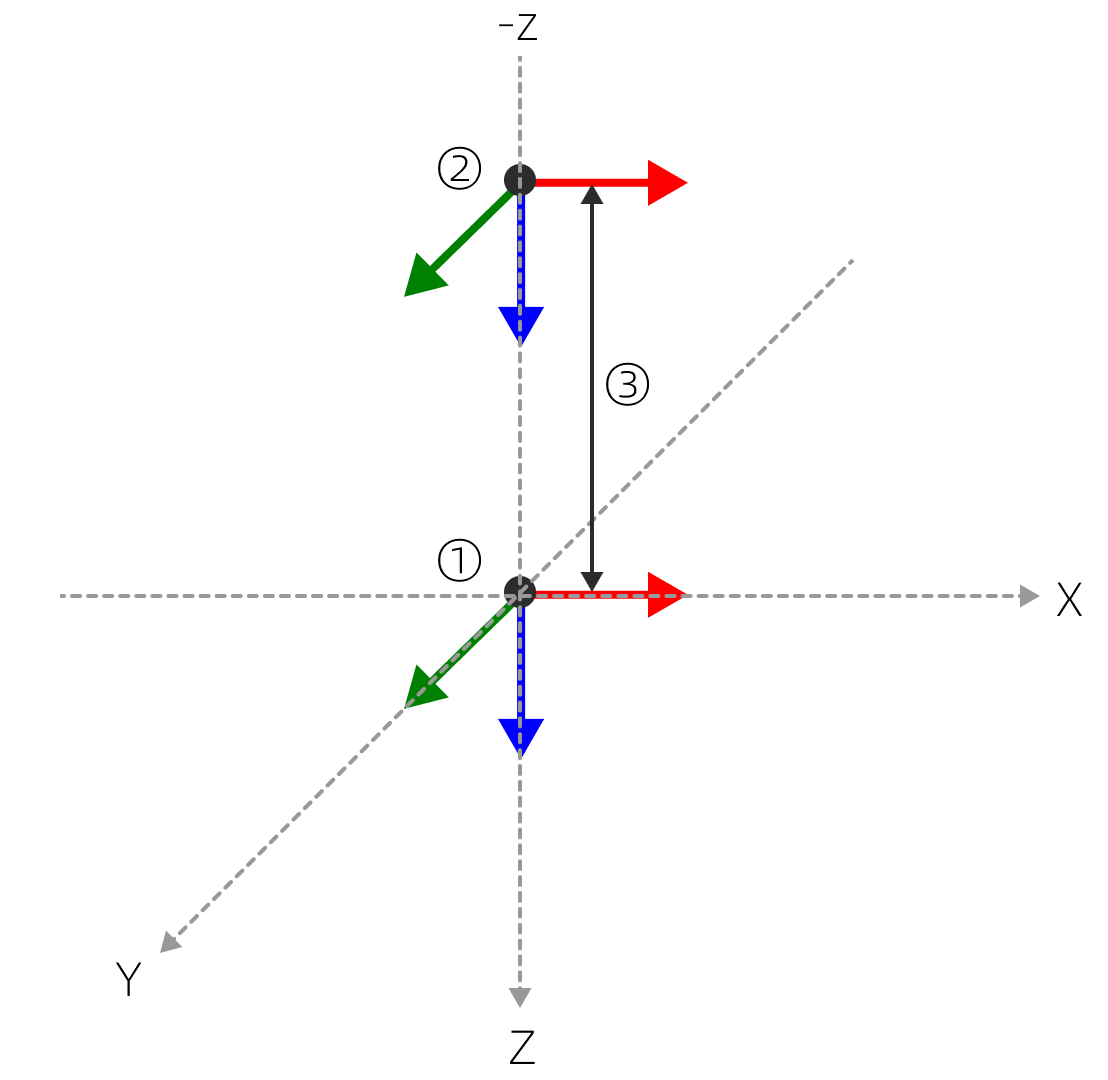
偏移距离:下图所示中:①为抓取点,②为预抓取点,③为偏移距离。
-
偏移方向:
方式
轴向
沿抓取点
X+、X-、Y+、Y-、Z+、Z-
沿机器人坐标系
X+、X-、Y+、Y-、Z+、Z-
自定义方向
X、Y、Z
-
自定义方向:X/Y/Z分量设置说明
参数值
说明
0
不向此方向偏移。
1
向正方向偏移。
-1
向负方向偏移。
上图所示预抓取点(②)为X、Y设置为0,Z设置为-1。
此外:
-
若要设置预抓取点参数,单击预抓取点名称右侧的
图标。 -
若要删除该预抓取点,单击预抓取点名称右侧的
图标。
-