路径规划参数说明
碰撞检测
详细内容请查看 碰撞检测配置说明。
工具绑定
当场景配置中添加了多个工具时,运动规划面板会显示工具绑定参数项,列出所有已配置的工具。若在多工具环境下使用运动规划,必须进行工具绑定操作,确保每个抓取点都与工具绑定。
-
单击工具名称右侧的
 图标,在弹窗中选择要绑定的抓取点。
图标,在弹窗中选择要绑定的抓取点。 -
单击[确认]。
抓取路径与回撤路径共有参数
路径点数量
路径点是轨迹的基本组成部分,每个路径点包含位置、方向等信息。
-
抓取路径
对于抓取路径,路径点数量包括从起始规划点到预抓取点之间的所有路径点以及最终的抓取点。最少包含"起始点"、"预抓取点"、"抓取点",因此最小取值为3。
-
回撤路径
对于回撤路径,路径点数量包括从预回撤点到回撤终止点之间的所有路径点以及抓取点。最少包含"抓取点"、"预回撤点"、"回撤终止点",因此最小取值仍为3。
路径点数量会影响轨迹的精细度和准确性:数量越多,轨迹越精细,路径可靠性更高,但规划时间也会相应增加。当抓取路径和回撤路径较长时,建议增加路径点数量;路径较短时则可减少。最终取值可根据实际项目需求进行调整。
|
当规划回撤路径时,最终的路径点数量将为设置路径点数量的两倍。 |
关节角度差异阈
关节角度差异阈值用于设置两个相邻路径点间允许单个关节变化的最大角度范围,限制关节角度差异以避免机器人位姿发生较大变化,使路径更平滑。实际规划过程中如果超过设置的阈值,将会报该路径点不可达。
运动规划器
规划器类型
在右侧下拉列表中选择规划器,运动规划器有以下选择:
-
关节空间规划器
关节空间规划器直接在机器人的关节空间中进行路径规划。主要特点包括:
-
精确控制:适用于机器人关节的精确控制。
-
复杂性:在高维关节空间中,搜索可能比较复杂。
-
适用性:适用于机器人臂等需要精确关节运动的应用。
-
-
直线规划器
线性规划器沿着直线进行路径规划,通常用于简单的直线运动。主要特点包括:
-
简单快速:适用于简单环境,计算速度快。
-
路径直线:生成的路径为直线,适用于没有障碍物的环境。
-
局限性:不适用于复杂环境中的路径规划。
-
-
贝塞尔曲线规划器
贝塞尔曲线规划器使用贝塞尔曲线生成平滑路径。主要特点包括:
-
平滑路径:生成的路径平滑,适用于对路径平滑度有要求的应用。
-
复杂计算:计算复杂度较高,适用于精确控制和需要平滑路径的环境。
-
灵活性:能够生成各种形状的曲线路径。
-
抓取路径其他参数
添加抓取路径起始点
-
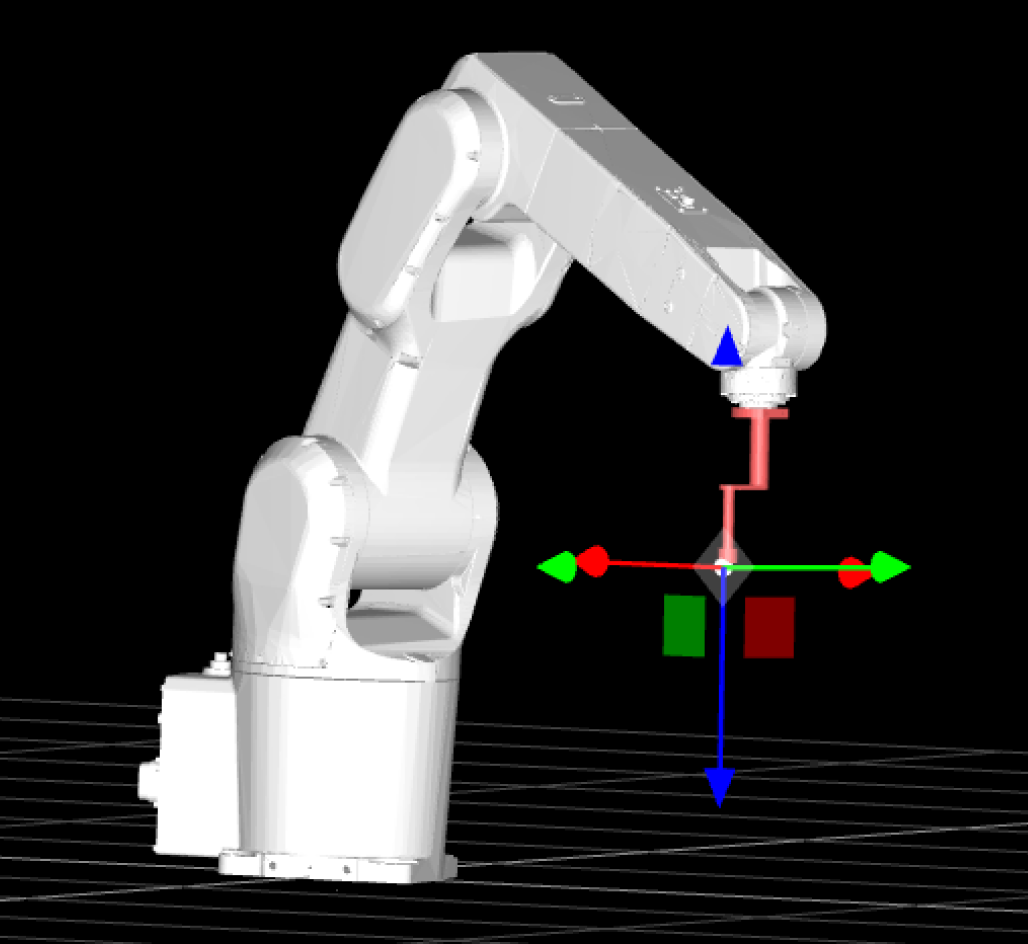
抓取路径起始点位姿不能直接通过自身参数进行设置,而是需要通过设置机器人位姿来实现,所以在添加抓取路径起始点时,可先设置机器人位姿:
-
打开参数设置面板,在机器人参数中打开机器人工具控制器并选择工具。
-
按住键盘 Shift ,鼠标左键拖动控制器将其运动到目标位置,在路径规划面板下点击路径点右侧
 图标,更新起始点位姿。
图标,更新起始点位姿。
-
-
添加抓取路径起始点:
-
单击抓取路径起始点条目右侧的+。
-
在弹窗中输入抓取路径起始点的名称,单击确认,抓取路径起始点将在TCP处生成。

起始点生成前
起始点生成后
此外:
若要设置多个起始点,请重新设置机器人位姿,然后添加起始点。新的起始点将在TCP处生成;如果未修改机器人位姿,新的起始点将与原起始点重叠。
-
-
设置抓取路径起始点模型参数(可选)。
-
在抓取路径起始点名称右侧单击
 图标。
图标。 -
在 详情 弹窗中可以对抓取路径起始点进行重命名、修改颜色、设置大小、不透明度和坐标轴长度等操作,并查看起始点的位姿信息。
此外:
-
若要调整起始点位姿,您需要重新设置机器人位姿,然后单击
图标,更新起始点位姿到机器人TCP上。 -
若不调整起始点位姿,您可单击
 图标,使机器人模型移动至该起始点。
图标,使机器人模型移动至该起始点。 -
若要删除该起始点,单击起始点名称右侧的
 图标。
图标。
-
-
什么是预抓取点
预抓取点是机械臂在到达最终抓取目标位置之前的一个中间姿态位置,通常被设定在料框顶部或用户自定义的安全位置,目的是确保机器人能够沿着一条安全、高效的路径接近目标物体,避免与周围环境发生碰撞。
添加预抓取点
-
单击预抓取点条目右侧的+。
-
在弹窗中输入抓取路径起始点的名称,调整偏移方向、偏移距离、碰撞检测步长后,单击确认。
-
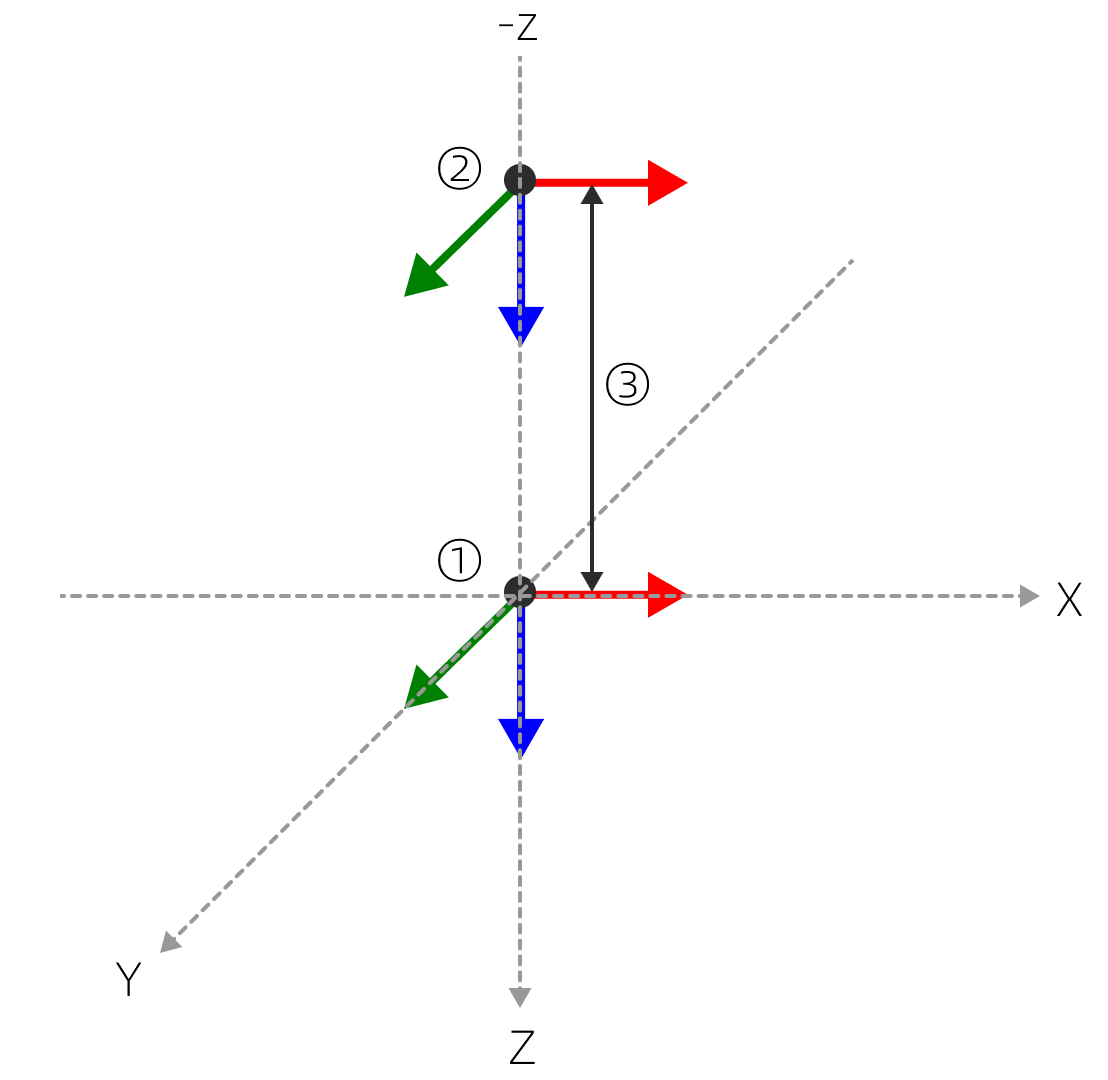
偏移距离:下图所示中:①为抓取点,②为预抓取点,③为偏移距离。
-
偏移方向:
方式
轴向
沿抓取点
X+、X-、Y+、Y-、Z+、Z-
沿机器人坐标系
X+、X-、Y+、Y-、Z+、Z-
自定义方向
X、Y、Z
-
自定义方向:X/Y/Z分量设置说明
参数值
说明
0
不向此方向偏移。
1
向正方向偏移。
-1
向负方向偏移。
上图所示预抓取点(②)为X、Y设置为0,Z设置为-1。
此外:
-
若要设置预抓取点参数,单击预抓取点名称右侧的
图标。 -
若要删除该预抓取点,单击预抓取点名称右侧的
图标。
-