碰撞检测配置说明
简介
通过配置碰撞检测来检测机器人抓取过程中可能发生的碰撞。
碰撞检测主要通过设置碰撞检测对及其对应的碰撞阈值来实现。
-
碰撞检测对即可能发生碰撞的双方。
-
碰撞阈值即对碰撞的容忍程度,该值设置越大则代表对碰撞的容忍程度越大。
碰撞检测配置
碰撞检测配置流程如下:
-
打开配置矩阵
单击打开配置矩阵,打开碰撞检测矩阵配置窗口。
-
选择碰撞检测对
您可以配置机器人关节、工具、场景物体、动态障碍物(场景点云、匹配结果模型)之间的碰撞。根据实际需求,选择合适的碰撞检测对。
根据行列信息,单击对应的方格,打开碰撞检测对配置窗口。
-
设置碰撞检测阈值
-
在碰撞检测对配置窗口中,在碰撞阈值下栏中选择碰撞检测单位并设置阈值。
-
单击添加配置。已配置的碰撞检测对方格将变为蓝色,并显示阈值参数。
-
单击保存配置。
-
-
设置碰撞网格边长
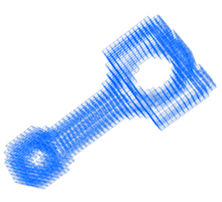
在碰撞检测过程中,点云本身不直接参与碰撞检测,而是通过将点云分布的三维空间递归划分为八个子立方体,直到立方体边长达到设置的碰撞网格长度;如果这些立方体与其他物体发生碰撞,则视为点云发生碰撞。通过调整碰撞网格边长,从而影响碰撞检测的精度和效率。
在碰撞检测中,碰撞网格边长直接影响检测的精度:碰撞网格边长越小,碰撞检测越精确,但计算时间越长。
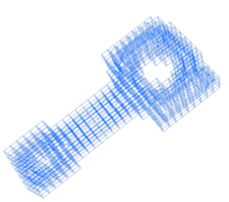
对于同一点云:
碰撞网格边长
计算时间
图示
1mm
较长

3mm
较短
5mm
较短
-
设置检测模式
-
快速模式: 在规划机器人某一条路径过程中,一旦发现路径点的任一碰撞点对发生碰撞,立即终止碰撞点对检测和剩余路径点碰撞检测。
-
完整模式: 在规划机器人某一条路径过程中,无论是否发现路径点的碰撞点对发生碰撞,都会完整遍历并检测该路径中所有路径点预设的所有碰撞点对。即:
-
检测单个点的所有碰撞检测对
-
将单条路径上的路径点完整检测
-
-
-
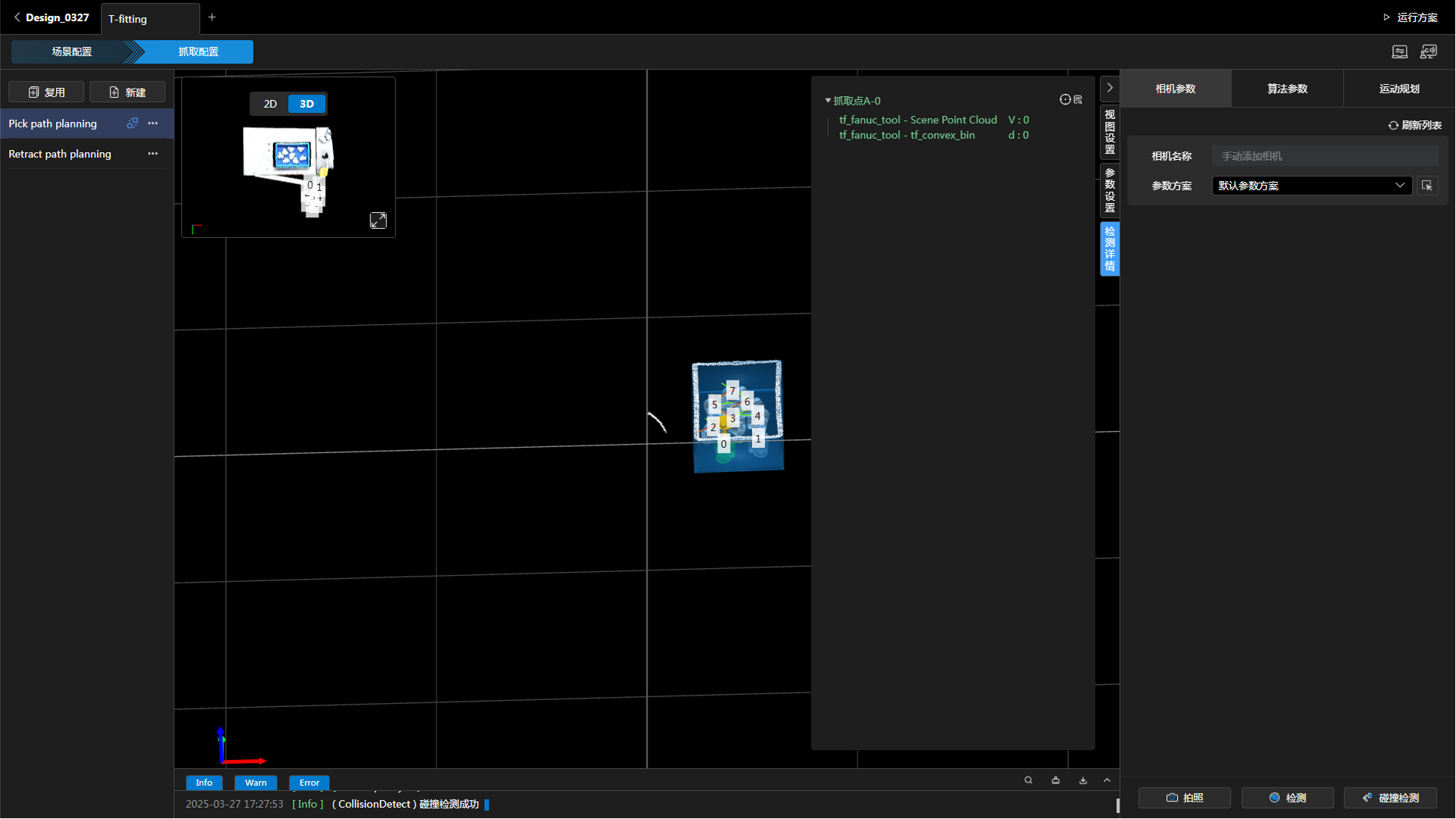
进行碰撞检测
-
单击拍照并等待拍照完成。
-
单击检测并等待检测完成。
-
单击碰撞检测等待碰撞检测完成。
-
单击右侧参数面板侧边的检测详情入口,查看碰撞检测的情况。
-