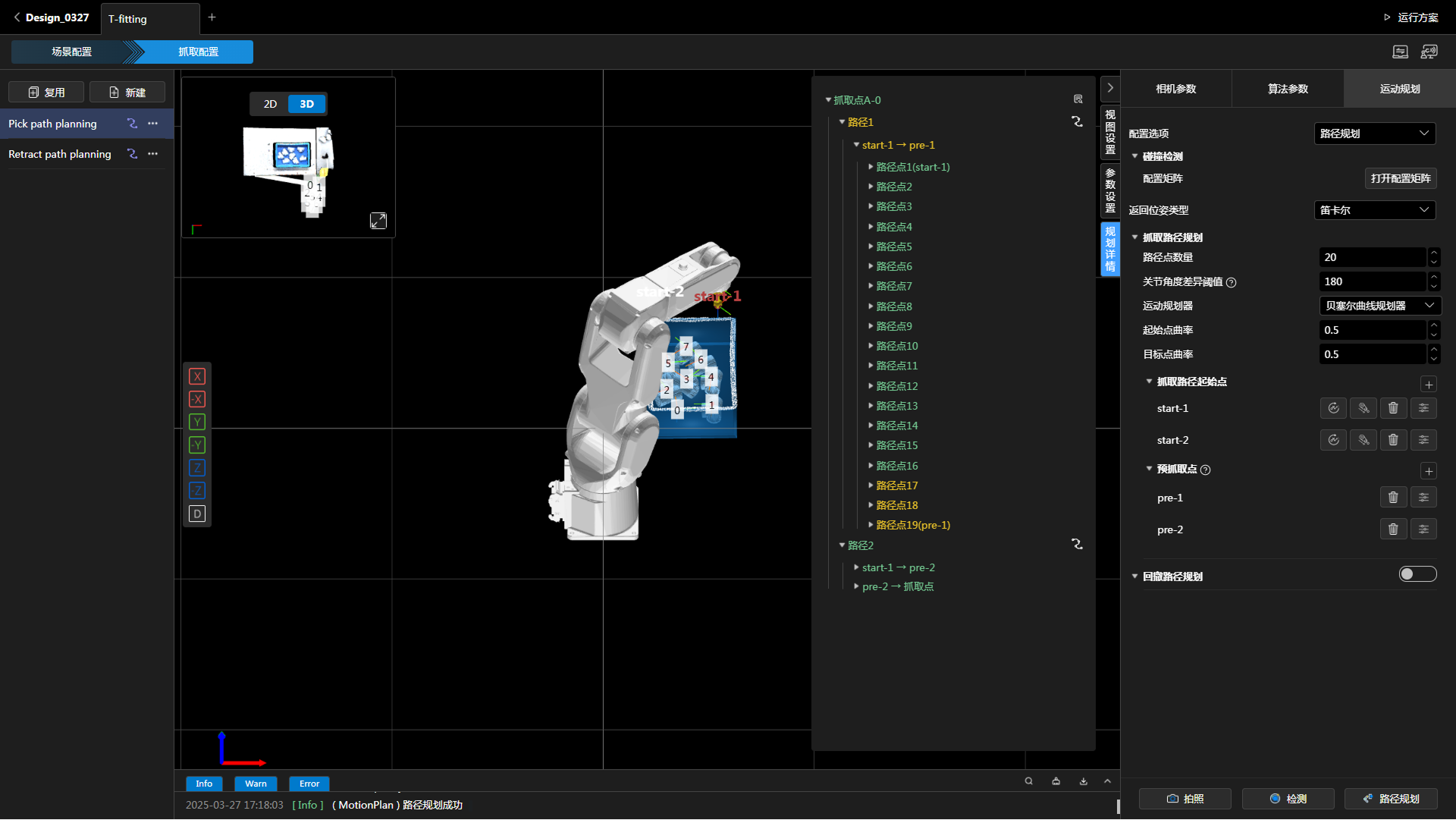
路径规划配置说明 简介 路径规划即规划机器人运动的抓取路径与回撤路径,并进行碰撞检测。 碰撞检测配置 路径规划配置流程如下: 结合实际情况完成碰撞检测与路径规划相关参数的配置。 设置完成后依次单击 拍照 > 检测 > 规划。 规划成功将显示路径动画。 规划失败将提示规划失败,请前往规划详情进行查看。 如果需要针对当前单帧图像进行调试,可以在调参后单独进行规划并查看效果。 视图设置 您可以通过修改视图设置中的内容来辅助查看路径规划的效果。 单击视图设置后,可开启点云纹理和原始点云开关,并支持修改路径点大小、颜色、关节角度刷新阈值、路径点执行时长以及路径循环显示次数。 参数详解 关节角度刷新阈值:机器人的关节角度会同步到软件,为了避免软件一直渲染机器人,只有当机器人的关节角度差异大于阈值才会触发界面机器人的刷新。 路径点执行时长:用于调节机器人仿真整条规划路径的总时长,时长值越大,运动速度越慢。 路径循环显示次数:用于调节机器人仿真规划路径的循环次数。 查看规划详情 单击右侧参数面板的规划详情,查看路径规划的情况。 单击 图标,可查看抓取点的名称、ID、优先级、对应抓取物ID和抓取点姿态信息。 单击 图标,可将检测的路径情况在视图中进行高亮显示。 单击 图标,可将机器人移动至该路径点上。 碰撞检测配置说明 路径规划参数说明