手眼标定说明
手眼标定相关术语与概念
-
手眼标定
指通过采集相机拍摄到的标定物位姿与机器人位姿,计算得到机器人坐标系与相机坐标系之间的转换关系。利用计算得到的转换矩阵,能够将相机坐标系下的目标点转换到机器人坐标系,从而实现机器人在3D视觉引导下的操作。手眼标定的精度至关重要,将直接影响系统的精度和稳定性。
-
相机安装方式
安装方式
说明
图示
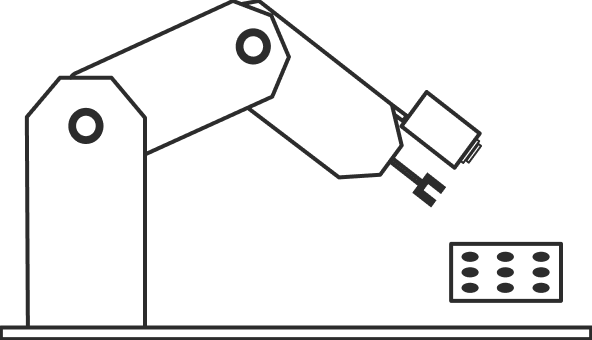
眼在手上(EIH)
相机安装在机器人末端,与法兰坐标系相对固定,相机跟随机器人末端移动。
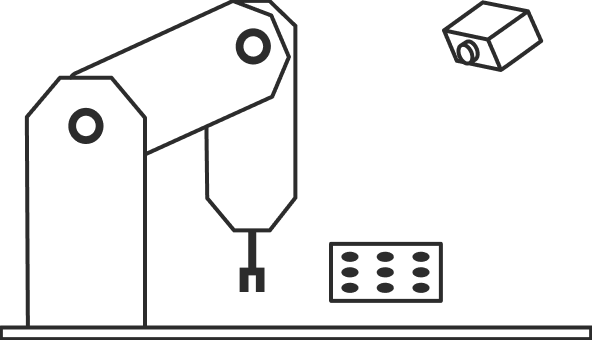
眼在手外(ETH)
相机安装在固定位置,与机器人基坐标系相对位置不变。
-
点对数据
同一特征点分别在相机、机器人两个坐标系下的一对位姿信息。