术语概念
在使用软件前,请先了解以下概念,以便更好地理解和使用软件。
-
项目方案
项目方案简称方案,是解决3D视觉引导项目的整体解决方案,可以处理一个或多个抓取场景。“项目方案”由一个或多个“工作空间”组成。
-
工作空间
工作空间简称空间,是针对特定抓取场景的具体配置和抓取设置,包括机器人、相机等场景配置,以及视觉算法、运动规划等抓取配置。
-
ROI
ROI(Region of Interest)是数据中一个特定的区域,设置ROI可以提高处理效率和精度,节省资源等。
-
手眼标定
手眼标定指通过采集相机拍摄到的标定物位姿与机器人位姿,计算得到机器人坐标系与相机坐标系之间的转换关系。利用计算得到的转换矩阵,能够将相机坐标系下的目标点转换到机器人坐标系,从而实现机器人在3D视觉引导下的操作。手眼标定的精度至关重要,将直接影响系统的精度和稳定性。
-
工具
末端工具是为使机器人完成其任务而专门设计并安装在机械接口处的装置,例如夹爪、吸盘。
-
场景物体
场景物体指的是真实机器人工作场景中的各类物体,一般包含托盘、料筐、支架等。
-
运动规划
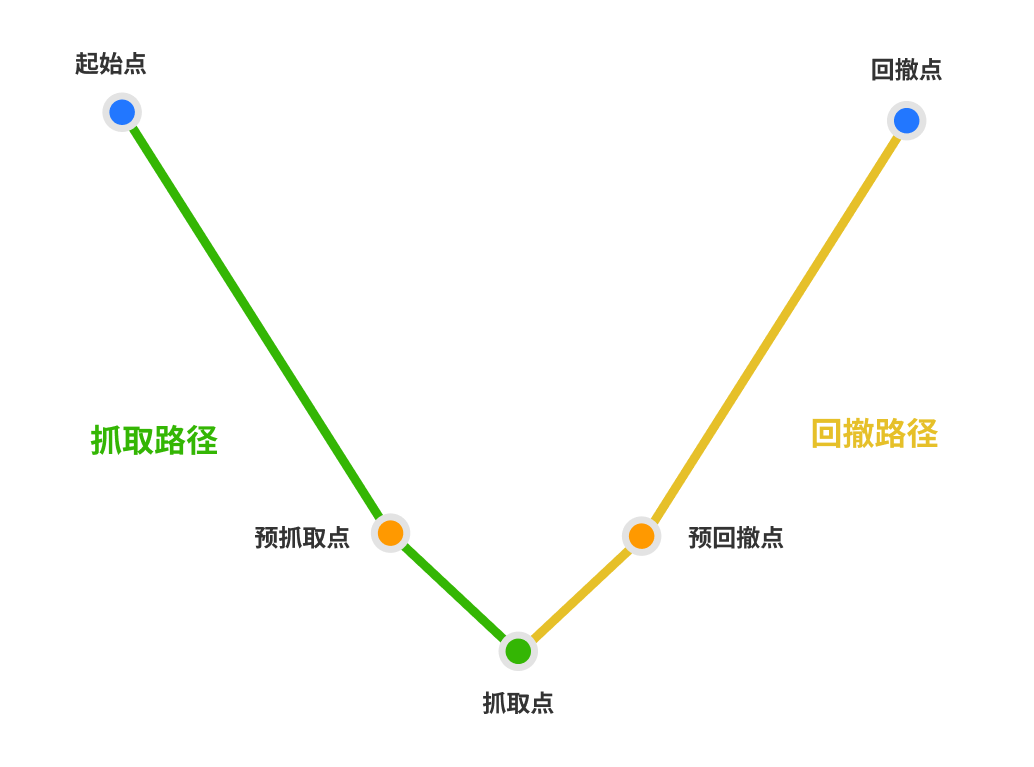
运动规划模块负责计算机器人从起始位置到目标抓取位置的最优路径序列。该模块采用全新算法架构,支持设置多个预抓取点和预回撤点,使机器人能够智能选择最合适的接近方式和安全的撤离路线,有效应对复杂工作环境中的障碍物。该模块的规划详情面板直观展示每条路径的检测结果,结合精确的轨迹显示和碰撞区域可视化功能,大幅简化了路径配置和调试过程,使工程师能够更快速地完成机器人应用方案的搭建与优化。
-
碰撞网格边长
在碰撞检测过程中,点云本身不直接参与碰撞检测,而是通过将点云分布的三维空间递归划分为八个子立方体,直到立方体边长达到设置的碰撞网格长度;如果这些立方体与其他物体发生碰撞,则视为点云发生碰撞。通过调整碰撞网格边长,从而影响碰撞检测的精度和效率。
在碰撞检测中,碰撞网格边长直接影响检测的精度:碰撞网格边长越小,碰撞检测越精确,但计算时间越长。