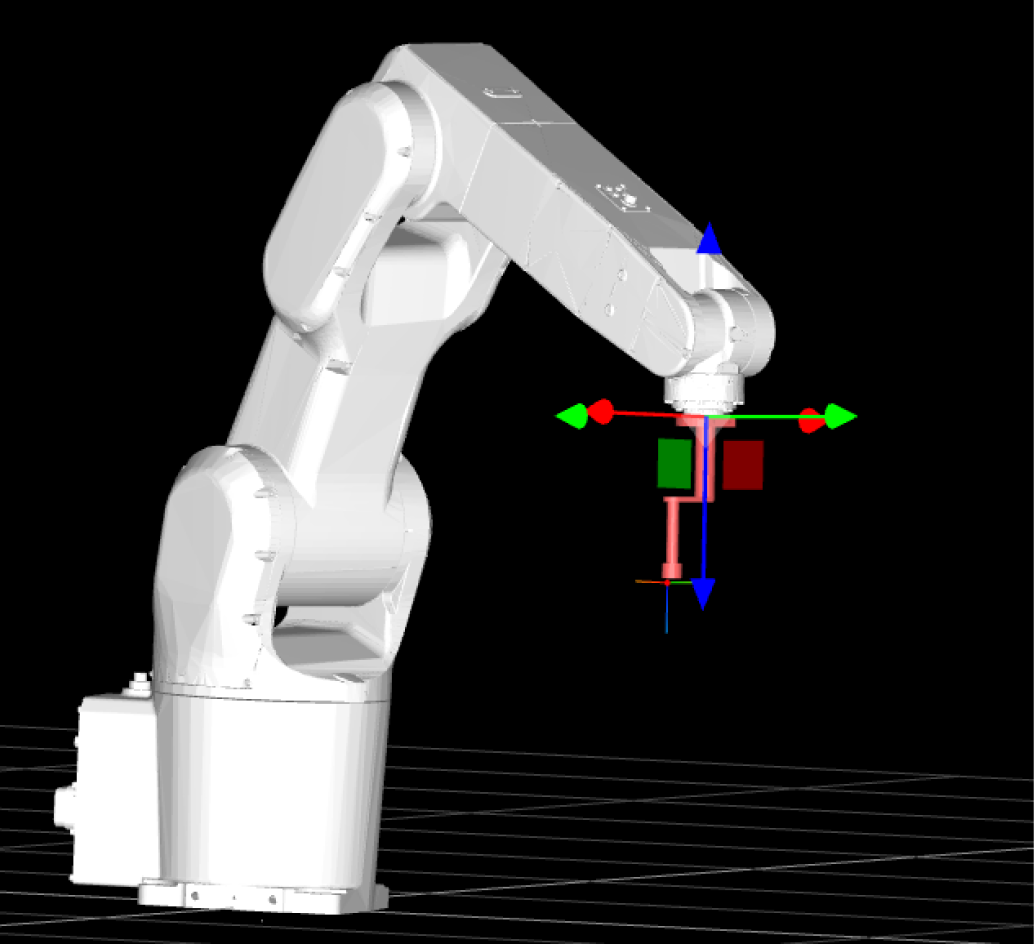
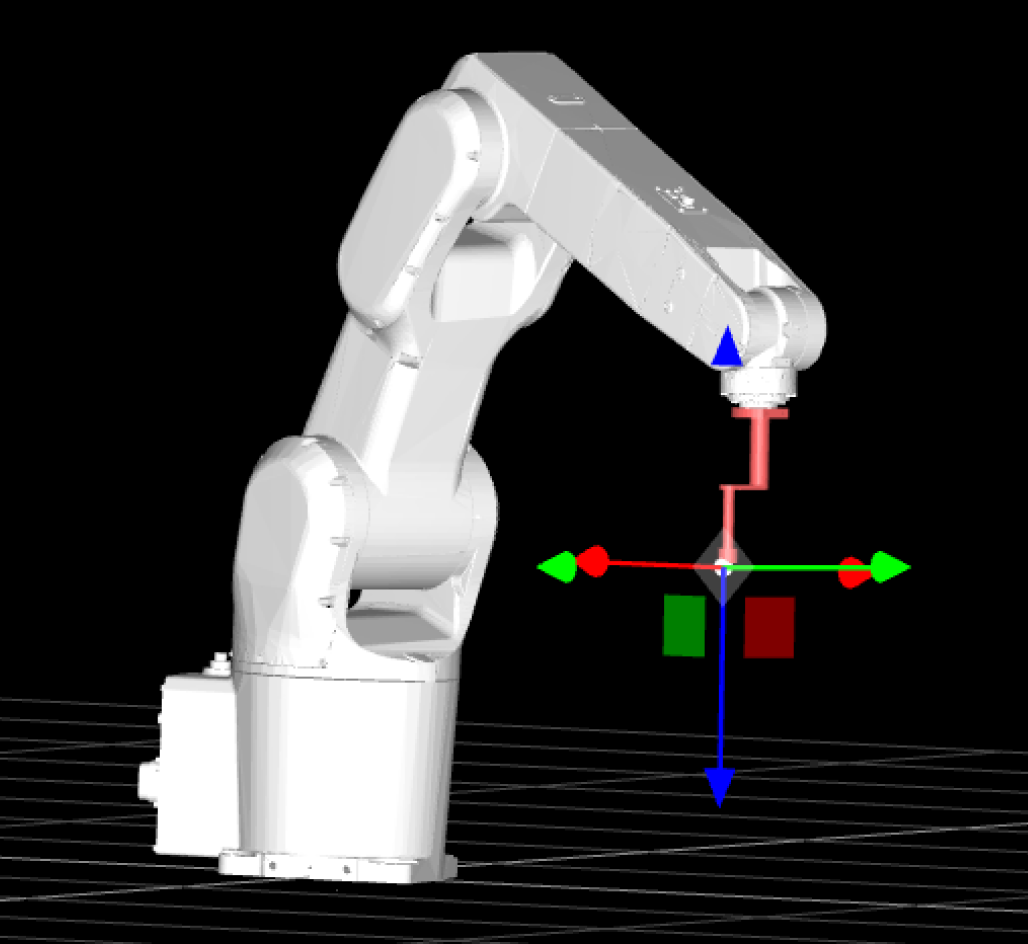
在抓取点的基础上增加一个路径点,以便规划出一段抓取点附近的无碰撞路径。 添加起始规划点 起始规划点位姿不能直接通过自身参数进行设置,而是需要通过设置机器人位姿来实现。 单击起始规划点条目右侧的+。 起始规划点将在TCP处生成,并默认命名为起始规划点1。 起始规划点生成前 起始规划点生成后 设置起始规划点模型参数(可选)。 在起始规划点名称右侧单击 。 在 设置起始规划点属性 弹窗中可以重命名其实规划点名称,编辑起始规划点颜色,设置其实规划点得大小、不透明度和坐标轴长度。 此外: 若需要调整规划点位姿,您需要先在机器人条目中调整机器人位姿,然后单击更新规划点位姿。 若机器人位姿发生变化,单击将机器人运动到该点,可使机器人模型重新回到机器人规划点。 删除起始规划点 在起始规划点条目下,单击起始规划点名称右侧的 。 更新起始规划点 在起始规划点名称右侧单击 。 将机器人移动到该点 在起始规划点名称右侧单击 。