工具箱界面
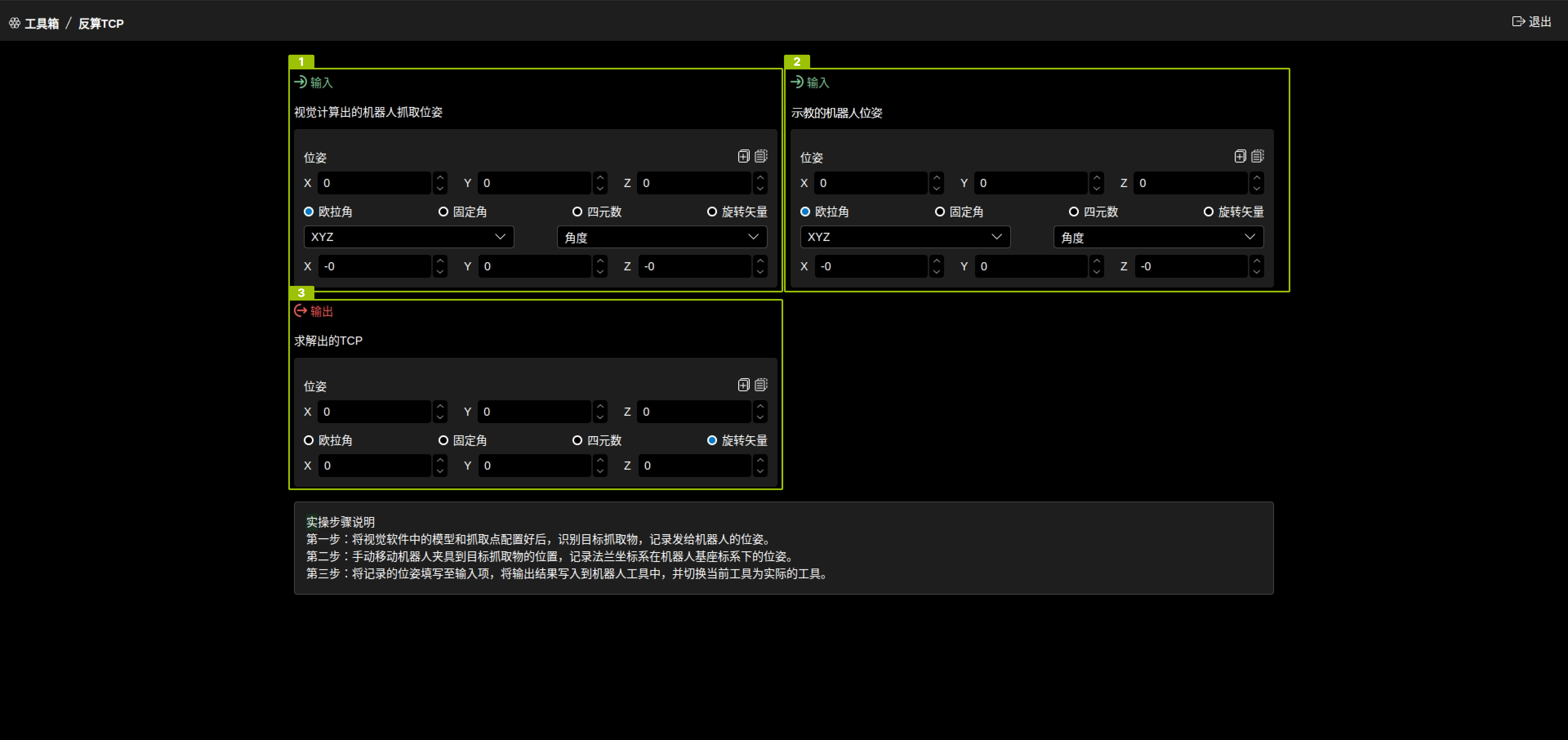
在主界面中单击工具箱,进入工具箱界面。在该界面中,您可以打开“几何点云生成”、“3D旋转变换计算”和“TCP反算工具”。
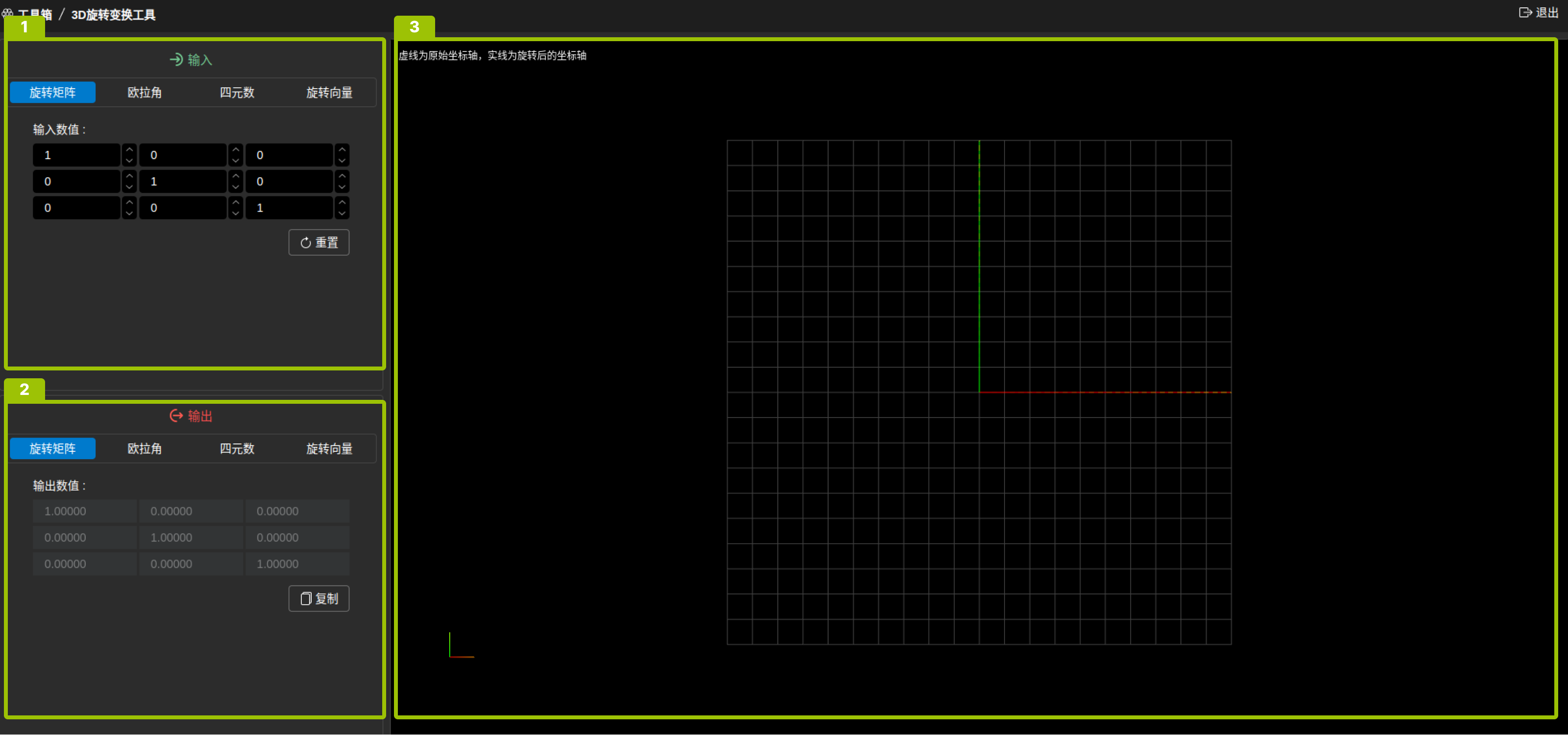
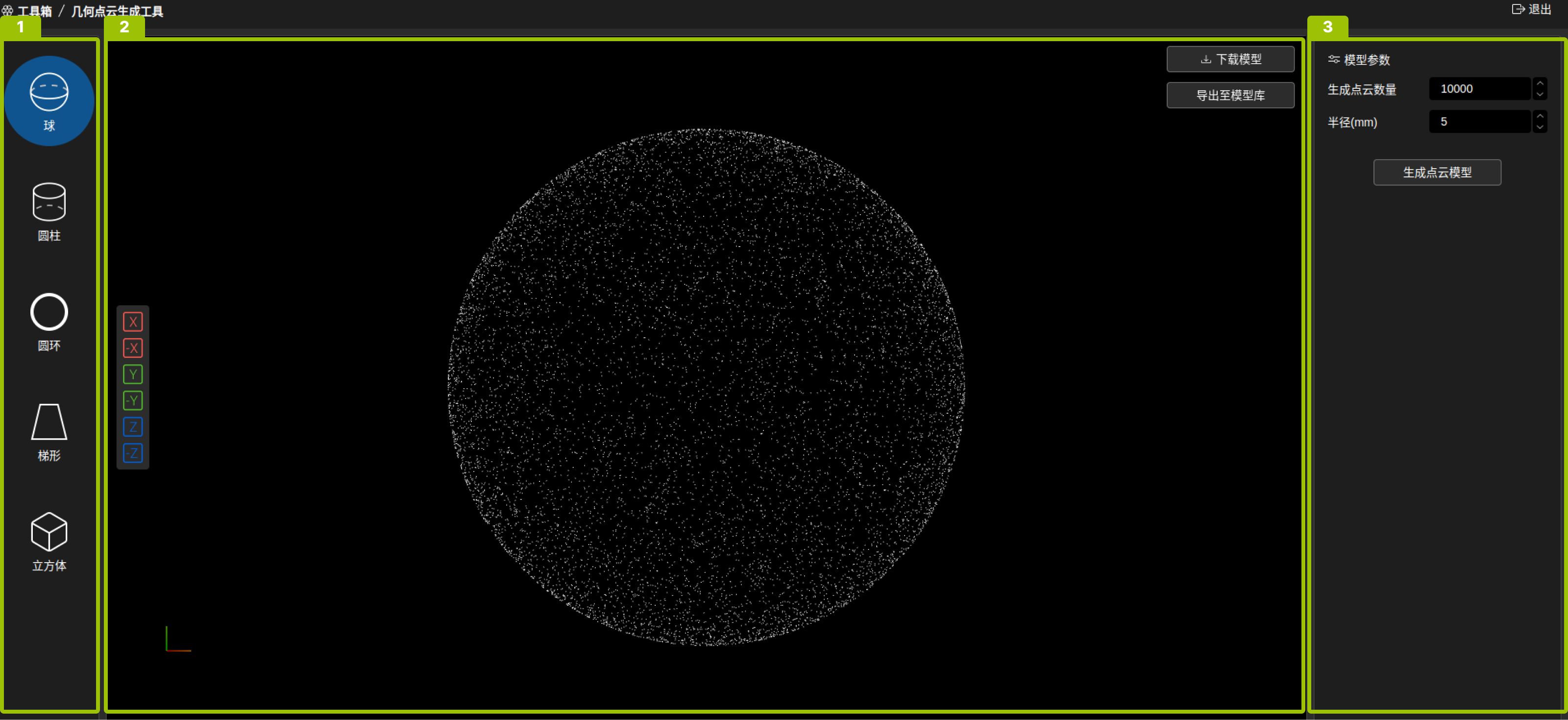
几何点云生成界面
几何点云生成工具用于创建规则的几何体(如圆环、球体、圆柱、梯形、立方体)点云模型。这些模型可用于制作工件的点云匹配模板。
在工具箱界面中,单击几何点云生成,进入几何点云生成工具界面,该界面由以下三部分组成:
序号 |
区域 |
说明 |
|---|---|---|
1 |
模型类型选择区域 |
在该区域中选择几何体类型。可选类型包括:球、圆柱、圆环、梯形、立方体。在圆环生成中,支持生成内径为0的圆形;在立方体生成中,支持生成高度为0的矩形平面。 |
2 |
模型显示区域 |
在该区域查看生成的点云模型,下载、导出模型。 |
3 |
模型参数设置区域 |
在该区域中设置几何体的各项参数。 |