用語と概念
ソフトウェアを使用する前に、以下の概念を理解して、より良くソフトウェアを理解し使用してください。
-
プロジェクトソリューション
プロジェクトソリューション(略称:ソリューション)は、3Dビジョンガイドプロジェクトの総合的なソリューションで、1つまたは複数の把持シーンに対応できます。「プロジェクトソリューション」は1つまたは複数の「ワークスペース」で構成されます。
-
ワークスペース
ワークスペース(略称:スペース)は、特定の把持シーンに対する具体的な設定と把持設定で、ロボット、カメラなどのシーン設定、およびビジョンアルゴリズム、モーションプランニングなどの把持設定を含みます。
-
ROI
ROI(Region of Interest)はデータ内の特定の領域です。ROIを設定することで、処理効率と精度を向上させ、リソースを節約できます。
-
ハンドアイキャリブレーション
ハンドアイキャリブレーションは、カメラで撮影したキャリブレーション物のポーズとロボットのポーズを収集し、ロボット座標系とカメラ座標系の間の変換関係を計算することを指します。計算された変換行列を利用して、カメラ座標系の目標点をロボット座標系に変換でき、3Dビジョンガイド下でのロボット操作を実現できます。ハンドアイキャリブレーションの精度は非常に重要で、システムの精度と安定性に直接影響します。
-
ツール
エンドツールは、ロボットがタスクを完了できるように特別に設計され、機械的インターフェースに取り付けられる装置で、例えばグリッパーや吸盤などがあります。
-
シーンオブジェクト
シーンオブジェクトは、実際のロボット作業シーンにおける各種物体を指し、一般的にパレット、料筐、ラックなどを含みます。
-
モーションプランニング
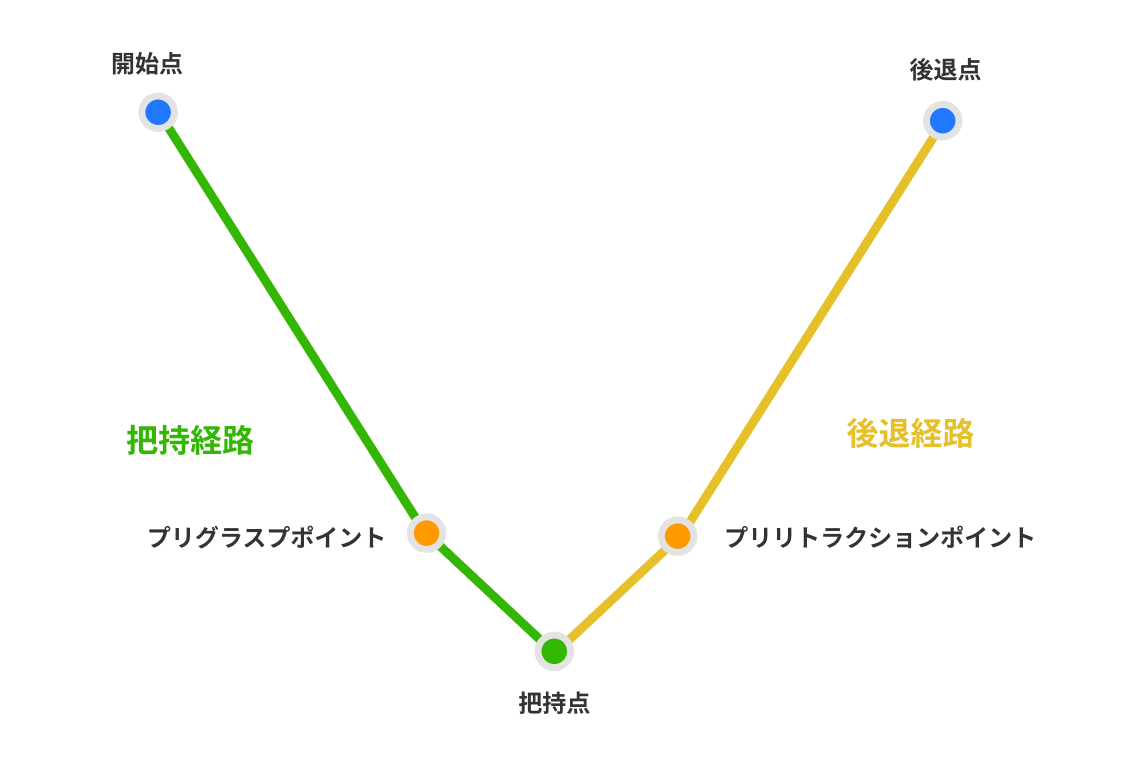
モーションプランニングモジュールは、ロボットの開始位置から目標把持位置までの最適なパスシーケンスを計算します。このモジュールは新しいアルゴリズムアーキテクチャを採用し、複数のプリグラブポイントとプリ撤退ポイントの設定をサポートし、ロボットが最も適切なアプローチ方法と安全な撤退ルートをインテリジェントに選択できるようにし、複雑な作業環境の障害物に効果的に対応します。このモジュールの計画詳細パネルは各パスの検出結果を直感的に表示し、正確な軌跡表示とコリジョンエリアの可視化機能を組み合わせることで、パスの設定とデバッグプロセスを大幅に簡素化し、エンジニアがロボットアプリケーションソリューションの構築と最適化をより迅速に完了できるようにします。
-
コリジョングリッドエッジ長
コリジョン検出プロセスでは、ポイントクラウド自体が直接コリジョン検出に参加するのではなく、ポイントクラウドが分布する3次元空間を8つのサブキューブに再帰的に分割し、キューブのエッジ長が設定されたコリジョングリッド長に達するまで続けます。これらのキューブが他の物体と衝突した場合、ポイントクラウドが衝突したとみなされます。コリジョングリッドエッジ長を調整することで、コリジョン検出の精度と効率に影響を与えます。
コリジョン検出において、コリジョングリッドエッジ長は検出精度に直接影響します:コリジョングリッドエッジ長が小さいほど、コリジョン検出はより正確になりますが、計算時間は長くなります。