参照座標系
基礎座標系詳解
ベース座標系
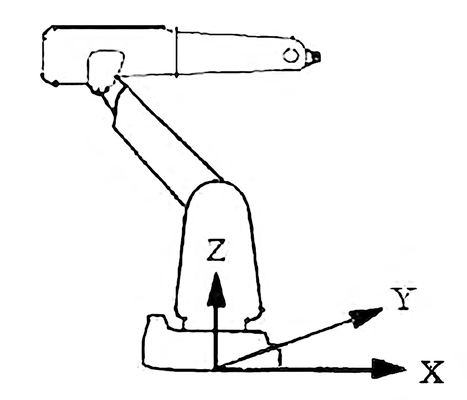
ベース座標系は産業用ロボットの基準座標系で、ロボットの空間における絶対位置を表します。産業用ロボットが地面に設置されている場合、この座標系は大部分の場合ベース上に位置し、原点はロボットベースの中心にあります。XY平面はベース平面と重なり、通常X軸方向はロボットの「背面」方向を指し、Z軸方向は垂直上向きです。ロボットが倒立設置されている場合、Z軸は下方を指します。
座標定義:
-
原点:ロボットベースの中心に位置
-
XY平面:ベース平面と重なる
-
X軸方向:通常ロボットの「背面」方向を指す
-
Z軸方向:垂直上向き(正設置)または下向き(倒立設置)
ベース座標系はロボット作業空間の絶対参照系として、すべての位置と姿勢はベース座標系に対して定義されます。簡単なアプリケーションでは、ユーザーはベース座標系で直接ロボット動作をプログラミングできます。
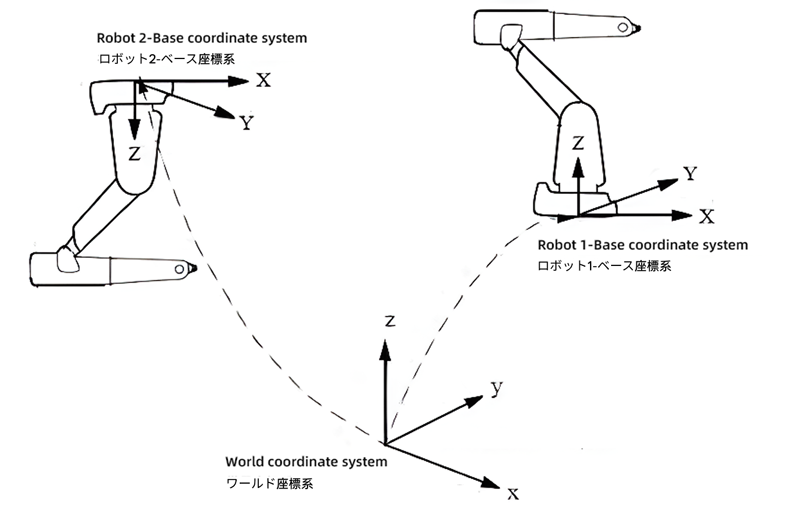
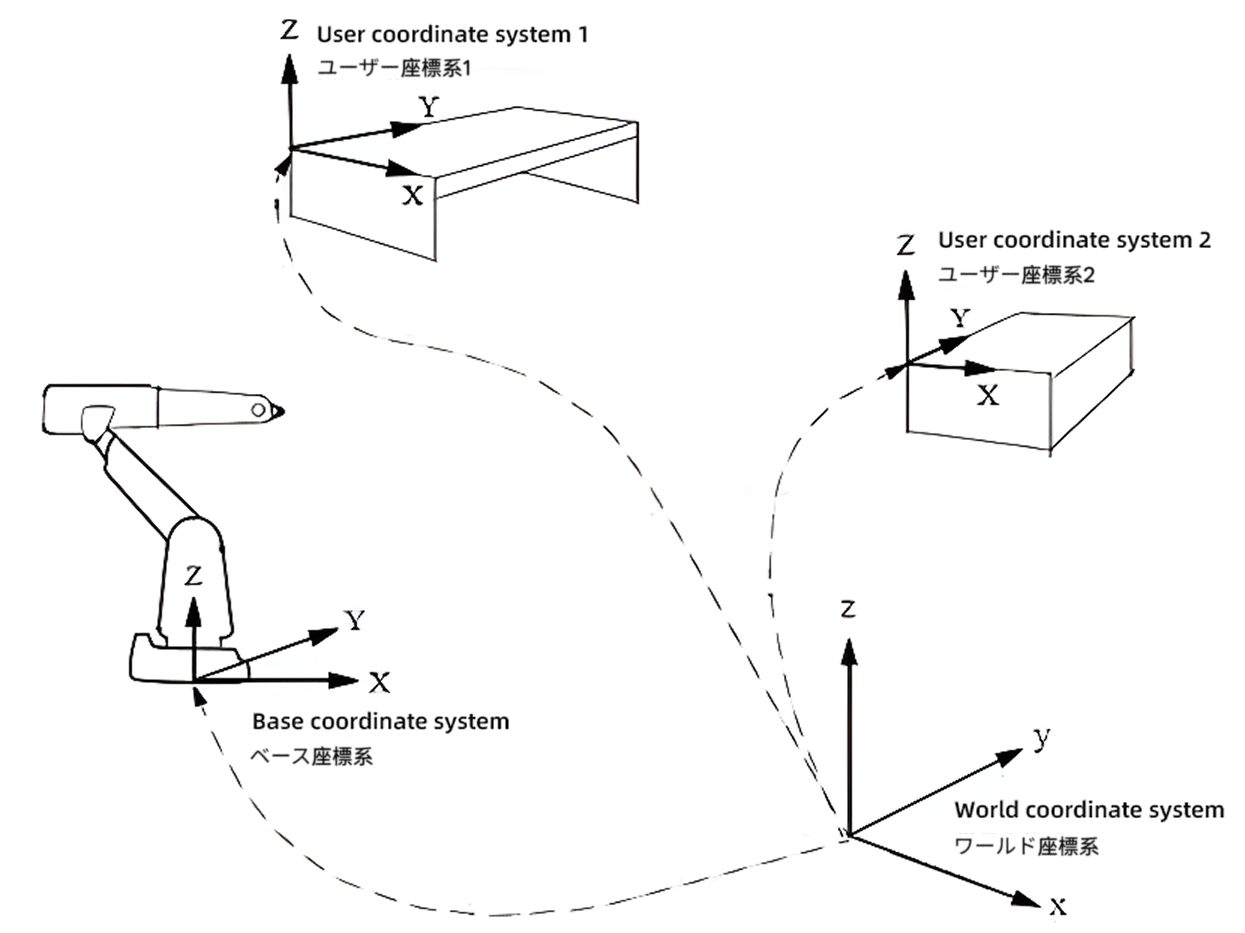
ワールド座標系
一般的に、ワールド座標系とベース座標系は重なっています。ロボットが地面に設置されている場合、ベース座標系を基礎としてプログラミングするのは非常に簡単です。しかし、特定の特殊な状況では、ワールド座標系を使用することでより大きな利便性をもたらします。
応用シナリオ:
-
非標準設置:ロボットが倒立または傾斜設置されている場合、ベース座標系でプログラミングするのは困難です。軸の方向が作業空間の主要方向と異なるためです。この時ワールド座標系を定義することでプログラミング作業を簡略化できます。
-
複数ロボット協調:工場内で複数のロボットが同一作業空間内で作業する場合、統一されたワールド座標系を使用することで、ロボット間の相互通信と協調が可能になり、衝突と干渉を回避できます。
エンドエフェクタ関連座標系
フランジ座標系
フランジ座標系はロボット出荷時に予め設定された固定座標系であり、変更することはできません。原点は6軸ロボットフランジプレートの中心に位置し、XY平面はフランジプレート平面と重なり、Z軸方向はフランジプレートに垂直に外向きに延伸します。
フランジ座標系はロボットエンドエフェクタの基準参照系として、すべてのツール座標系はフランジ座標系に基づいて定義されます。この座標系はフランジに取り付けられる各種ツールに統一された参照標準を提供します。
座標定義:
-
原点:6軸ロボットフランジプレートの中心に位置
-
XY平面:フランジプレート平面と重なる
-
Z軸方向:フランジプレートに垂直に外向きに延伸
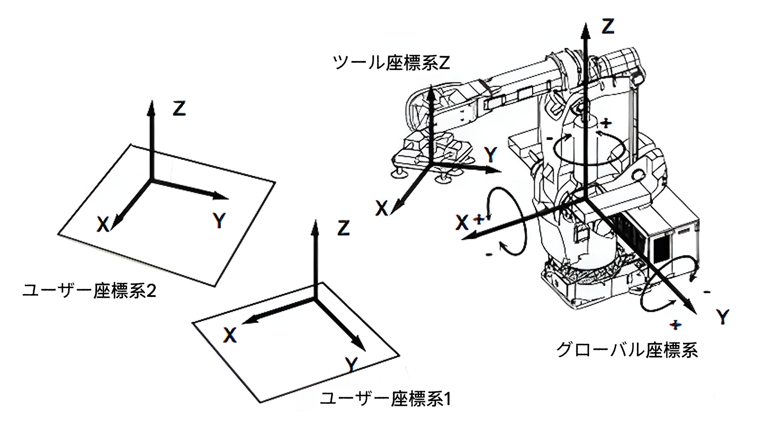
ツール座標系とTCP
ツール座標系はツール中心点(TCP)を原点として確立される座標系で、ロボットエンドツールのフランジ座標系に対する位置関係を記述します。ツール中心点(TCP)はツール座標系の原点で、産業用ロボットの重要技術の一つです。
ツール座標系のパラメータはロボット教示によって得ることも、ツール寸法の精密測定によって得ることもできます。TCPの設定により、プログラミングとプログラム調整が容易になります:ロボットが運動する時、通常言うロボットの位置、経路、精度、速度は、実際にはTCPの位置、経路、精度、速度のことです。
ツール座標系によってロボットはフランジ中心ではなく、ツール先端点の位置を精密に制御できます。これは溶接、組み立て、把持などの精密作業において極めて重要です。
ビジョンシステム座標系
カメラ座標系
カメラ座標系はロボットビジョンシステムの基礎で、カメラ光学中心を原点として確立されます。その役割はカメラが採集した画像情報を三次元空間座標情報に変換し、ロボットビジョン位置決めと認識に基礎データを提供することです。
座標定義:
-
原点:カメラレンズとセンサーのキャリブレーション中心位置
-
Z軸方向:カメラ下向き(撮影方向)
-
X軸方向:カメラ長辺方向、通常は負X軸方向
-
Y軸方向:右手法則に従う
特殊応用座標系
座標系変換関係
ロボットビジョンシステムにおいて、カメラ設置位置の違いにより、二つの主要な手眼キャリブレーション方式が存在し、異なる座標系変換関係に対応します。
Eye-to-Handキャリブレーションはカメラがロボット作業空間外部に固定され、カメラとロボットベースとの固定関係を確立することを指します。この構成では、変換関係はカメラ座標系とロボットベース座標系間の変換で、変換行列はカメラのロボットベースに対する位置と姿勢を記述します。
Eye-in-Handキャリブレーションはカメラがロボット末端に設置され、ロボットと共に運動することを指します。この構成では、変換関係はカメラ座標系とロボットフランジ座標系間の変換で、変換行列はカメラのロボットフランジに対する固定位置と姿勢を記述します。
ロボット運動制御の三要素
ロボットが運動指令を実行する時、三つのキー要素を明確にする必要があります:ポイントデータ(目標位置の座標値)、ツール座標系TCP(どのツールの座標系を使用するか)、参照座標系(ポイントデータがどの座標系に対して定義されるか)。
異なるブランドのロボットはこれらの要素に対して異なる表示方式を有します。KUKAロボットは$BASEで参照座標系を定義し、$TOOLでツール座標系を定義します。ABBロボットはwobj(ワークオブジェクト)で参照座標系を定義し、tool(ツールオブジェクト)でツール座標系を定義します。
実際応用事例:パレタイジング操作
パレタイジング操作は産業用ロボットの典型的な応用で、異なる座標系の組み合わせによって柔軟なプログラミング戦略を実現できます。
-
戦略一:ワーク座標系の調整
ツールとポイントを固定し、ワーク座標系を調整します。この方式では、ツール座標系(tool)は変わらず、ポイントデータ(P)は変わらず、パレタイジング層数に基づいてワーク座標系(wobj)を調整します。この方法の利点はプログラム構造が簡単で、一つのパラメータを調整するだけで異なる層のパレタイジングを実現できることです。
-
戦略二:ポイントデータの調整
二つ目の方式はツールとワーク座標系を固定し、ポイントデータを調整することです。ツール座標系(tool)は変わらず、ワーク座標系(wobj)は変わらず、パレタイジング要求に基づいてポイントデータ(P)を計算調整します。この方法は各層のポイントに対して計算が必要ですが、より柔軟なパレタイジングパターンを実現できます。