パス計画パラメータ説明
コリジョン検出
詳細内容は衝突検出設定ガイドを参照してください。
ツールバインディング
シーン設定で複数のツールが追加されている場合、モーションプランニングパネルにツールバインディングパラメータ項目が表示され、設定済みのすべてのツールがリストされます。マルチツール環境でモーションプランニングを使用する場合、ツールバインディング操作を必ず実行し、各グラブポイントがツールとバインドされていることを確認する必要があります。
-
ツール名の右側にある
 アイコンをクリックし、ポップアップウィンドウでバインドするグラブポイントを選択します。
アイコンをクリックし、ポップアップウィンドウでバインドするグラブポイントを選択します。 -
[確認]をクリックします。
グラブパスと撤退パスの共通パラメータ
パスポイント数
パスポイントは軌跡の基本構成要素で、各パスポイントには位置、方向などの情報が含まれます。
-
グラブパス
グラブパスの場合、パスポイント数には開始計画ポイントからプリグラブポイントまでのすべてのパスポイントおよび最終的なグラブポイントが含まれます。最低でも「開始ポイント」、「プリグラブポイント」、「グラブポイント」を含むため、最小値は3です。
-
撤退パス
撤退パスの場合、パスポイント数にはプリ撤退ポイントから撤退終了ポイントまでのすべてのパスポイントおよびグラブポイントが含まれます。最低でも「グラブポイント」、「プリ撤退ポイント」、「撤退終了ポイント」を含むため、最小値は同様に3です。
パスポイント数は軌跡の精密度と正確性に影響します:数が多いほど、軌跡はより精密になり、パスの信頼性が高くなりますが、計画時間も相応に増加します。グラブパスと撤退パスが長い場合は、パスポイント数を増やすことを推奨します。パスが短い場合は減らすことができます。最終的な値は実際のプロジェクト要件に応じて調整できます。
|
撤退パスを計画する際、最終的なパスポイント数は設定したパスポイント数の2倍になります。 |
関節角度差異閾値
関節角度差異閾値は、2つの隣接するパスポイント間で単一関節の変化を許可する最大角度範囲を設定するために使用され、ロボットのポーズが大きく変化することを避けるために関節角度差異を制限し、パスをより滑らかにします。実際の計画プロセスで設定された閾値を超えた場合、そのパスポイントは到達不可能と報告されます。
モーションプランナー
プランナーのタイプ
右側のドロップダウンリストでプランナーを選択します。モーションプランナーには以下の選択肢があります:
-
関節空間プランナー
関節空間プランナーは、ロボットの関節空間で直接パス計画を行います。主な特徴:
-
精密制御:ロボット関節の精密制御に適しています。
-
複雑性:高次元関節空間では、検索が複雑になる可能性があります。
-
適用性:ロボットアームなど、精密な関節運動が必要なアプリケーションに適しています。
-
-
直線プランナー
線形プランナーは直線に沿ってパス計画を行い、通常は単純な直線運動に使用されます。主な特徴:
-
シンプルで高速:単純な環境に適し、計算速度が速いです。
-
直線パス:生成されるパスは直線で、障害物のない環境に適しています。
-
制限:複雑な環境でのパス計画には適していません。
-
-
ベジェ曲線プランナー
ベジェ曲線プランナーは、ベジェ曲線を使用して滑らかなパスを生成します。主な特徴:
-
滑らかなパス:生成されるパスが滑らかで、パスの滑らかさが要求されるアプリケーションに適しています。
-
複雑な計算:計算の複雑度が高く、精密制御と滑らかなパスが必要な環境に適しています。
-
柔軟性:さまざまな形状の曲線パスを生成できます。
-
グラブパスのその他のパラメータ
把持パス開始点の追加
-
把持パス開始点の姿勢は自身のパラメータで直接設定することはできず、ロボットの姿勢を設定することで実現する必要があります。把持パス開始点を追加する際には、まずロボットの姿勢を設定します:
-
パラメータ設定パネルを開き、ロボットパラメータのロボットツールコントローラを開いてツールを選択します。
-
キーボードの Shift キーを押しながら、マウスの左ボタンでコントローラをドラッグして目標位置に移動させ、パス計画パネルのパスポイント右側にある
 アイコンをクリックして、開始点の姿勢を更新します。
アイコンをクリックして、開始点の姿勢を更新します。
-
-
把持パス開始点を追加します:
-
把持パス開始点エントリの右側にある + をクリックします。
-
ポップアップウィンドウで把持パス開始点の名前を入力し、確認 をクリックすると、把持パス開始点がTCP位置に生成されます。
開始点生成前
開始点生成後
さらに:
複数の開始点を設定するには、ロボットの姿勢を再設定してから開始点を追加します。新しい開始点はTCP位置に生成されます。ロボットの姿勢を変更しない場合、新しい開始点は元の開始点と重なります。
-
-
把持パス開始点のモデルパラメータを設定します(任意)。
-
把持パス開始点名の右側にある
 アイコンをクリックします。
アイコンをクリックします。 -
詳細ポップアップで、把持パス開始点の名前変更、色の変更、サイズ、不透明度、座標軸の長さなどを設定し、開始点の姿勢情報を確認できます。
さらに:
-
開始点の姿勢を調整するには、ロボットの姿勢を再設定してから
アイコンをクリックして、開始点の姿勢をロボットのTCPに更新する必要があります。 -
開始点の姿勢を調整する必要がない場合は、
 アイコンをクリックして、ロボットモデルをその開始点に移動させることができます。
アイコンをクリックして、ロボットモデルをその開始点に移動させることができます。 -
開始点を削除するには、開始点名の右側にある
 アイコンをクリックします。
アイコンをクリックします。
-
-
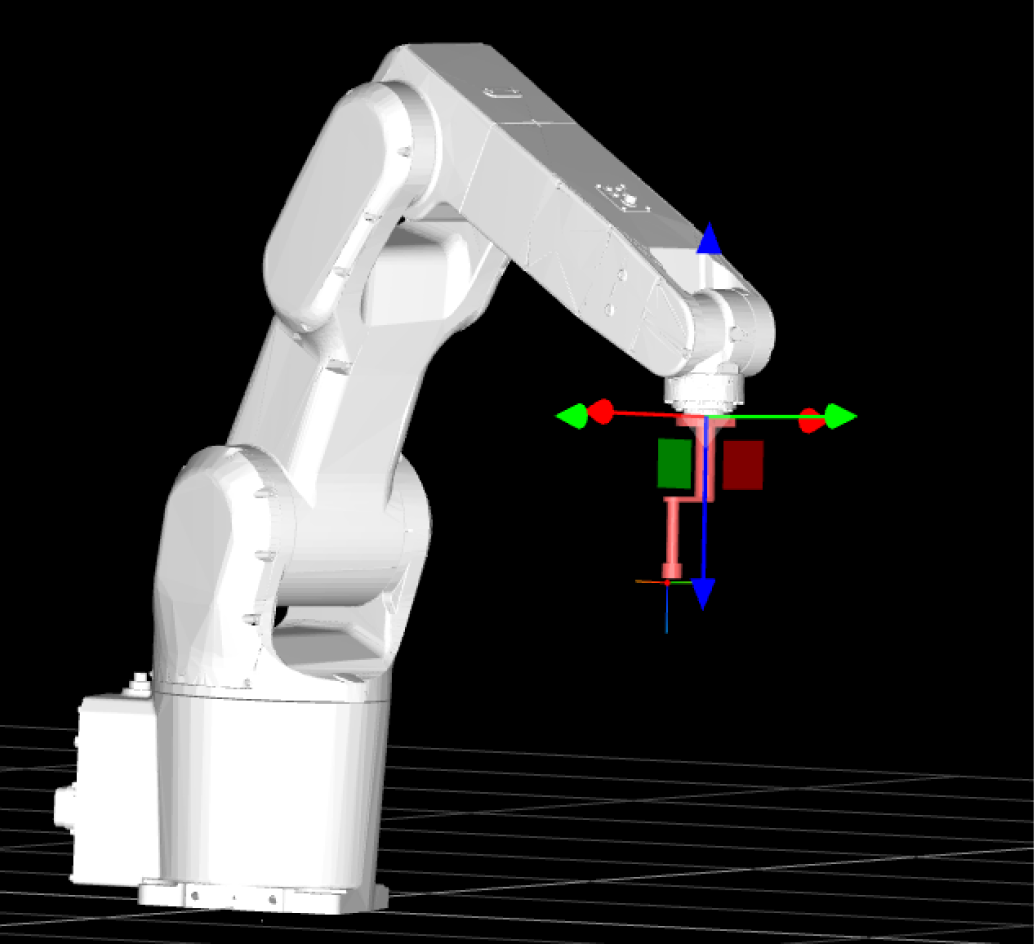
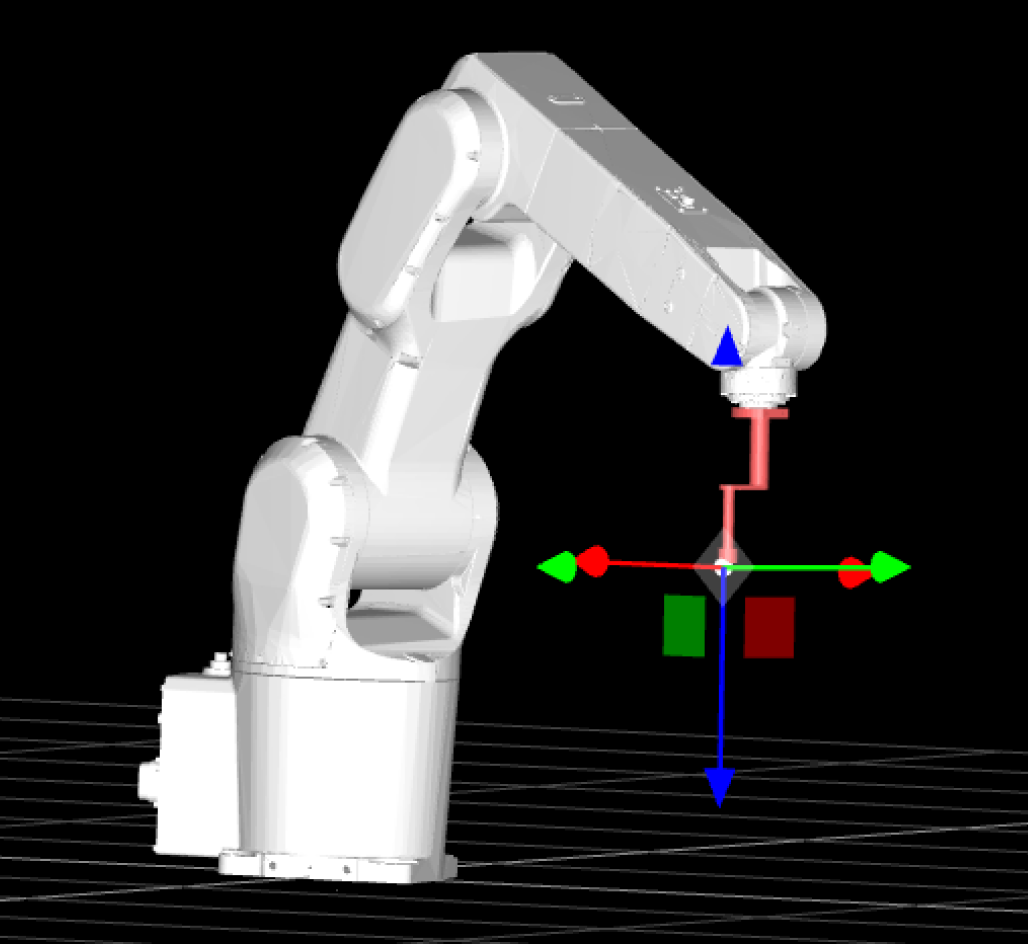
プリグラスプポイントとは?
プリグラスプポイントは、ロボットアームが最終的な把持目標位置に到達する前の中間姿勢位置です。通常、マテリアルボックスの上部またはユーザー定義の安全な位置に設定されます。目的は、ロボットが周囲の環境と衝突することなく、安全かつ効率的な経路で目標物体に接近できるようにすることです。
プリグラスプポイントの追加
-
プリグラスプポイントエントリの右側にある + をクリックします。
-
ポップアップウィンドウでプリグラスプポイントの名前を入力し、オフセット方向、オフセット距離、衝突検出ステップサイズを調整してから、確認 をクリックします。
-
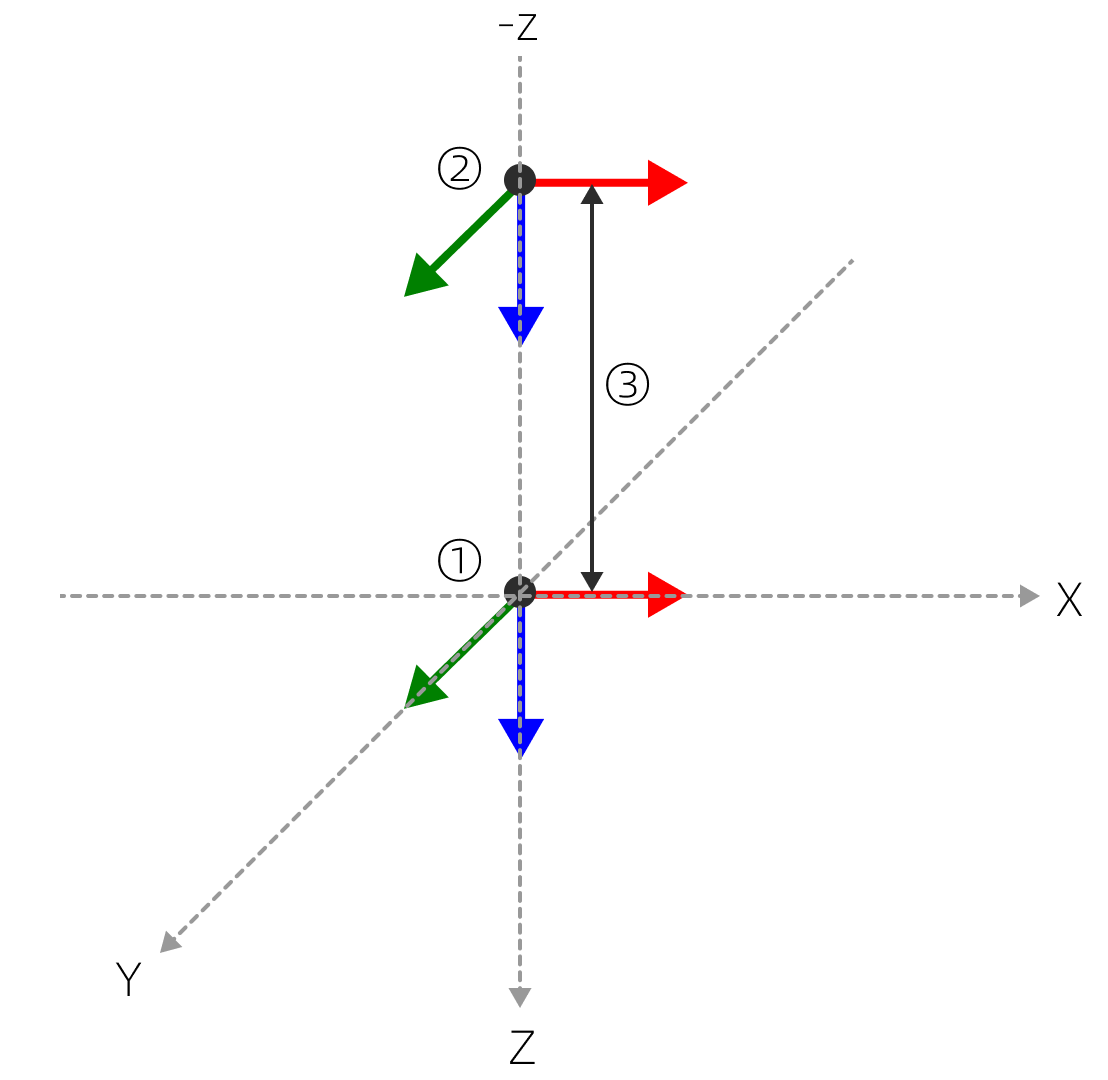
オフセット距離:下図のように:①は把持点、②はプリグラスプポイント、③はオフセット距離です。
-
オフセット方向:
方式
軸
把持点に沿って
X+、X-、Y+、Y-、Z+、Z-
ロボット座標系に沿って
X+、X-、Y+、Y-、Z+、Z-
カスタム方向
X、Y、Z
-
カスタム方向:X/Y/Z成分の設定説明
パラメータ値
説明
0
この方向にオフセットしない。
1
正方向にオフセットする。
-1
負方向にオフセットする。
上図に示されているプリグラスプポイント(②)は、XとYが0に設定され、Zが-1に設定されています。
さらに:
-
プリグラスプポイントのパラメータを設定するには、プリグラスプポイント名の右側にある
アイコンをクリックします。 -
プリグラスプポイントを削除するには、プリグラスプポイント名の右側にある
アイコンをクリックします。
-
撤退パスのその他のパラメータ(オプション)
プリリトラクションポイントとは?
プリリトラクションポイントは、ロボットアームが把持目標位置に到達した後の中間姿勢位置です。通常、マテリアルボックスの上部またはユーザー定義の安全な位置に設定され、プリリトラクションポイントからリトラクションパス終了点付近までの衝突のない経路を計画するためのものです。
プリリトラクションポイントの追加
操作手順については、プリグラスプポイントの追加を参照してください。
リトラクションパス終了点とは?
リトラクションパス計画アルゴリズムにおける終点位置であり、ワークを運ぶロボットまたはグリッパーの最終状態を表します。位置と姿勢の情報を含み、安全で衝突のないリトラクションパスを計画するためのものです。
リトラクションパス終了点の追加
| リトラクションパス終了点の姿勢は把持パス開始点と同じです。自身のパラメータで直接設定することはできず、ロボットの姿勢を設定することで実現する必要があります。 |
操作手順については、把持パス開始点の追加を参照してください。