ロボット一般的データフォーマット
デカルト空間位置データフォーマット
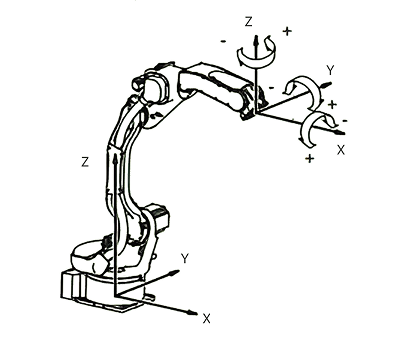
デカルト空間位置データはロボットエンドエフェクタの三次元空間における位置と姿勢の数学的表現です。各メーカーは異なる姿勢表現方法を採用していますが、通常すべて位置座標(X、Y、Z)と姿勢情報を含みます。
|
特に明記されない限り、デフォルトは:
|
ABB
ABBロボットでは[X, Y, Z, q1, q2, q3, q4]フォーマットを採用し、その中で位置はミリメートルを単位とし、単位四元数で姿勢を表現します。四元数でq1は実部、q2、q3、q4はそれぞれxyz方向の虚部です。ティーチペンダント上でZYXオイラー角を読み取れますが、内部のrobtargetデータ構造は実際には単位四元数を使用して姿勢を表現します。
ABBのrobtargetデータタイプは以下のコンポーネントを含みます:
コンポーネント名 |
データタイプ |
説明 |
trans |
pos |
mmでツール中心点の位置(X、Y、Z)を表現 |
rot |
orient |
単位四元数形式でツール方位(q1、q2、q3、q4)を表現 |
robconf |
confdata |
ロボットアームの軸構成(cf1、cf4、cf6とcfx) |
extax |
extjoint |
外部軸データ、外部軸の位置制御に使用 |
FANUC
FANUCロボットでは[X, Y, Z, W, P, R]フォーマットを採用して位置と姿勢データを表現し、その中で(X, Y, Z)は位置座標、(W, P, R)は姿勢角度です。xyz固定角によって姿勢を表現し、これはRPY角とも呼ばれます。
システム内の位置と姿勢データはユーザー座標系とツール座標系を通じて管理されます。ユーザー座標系はユーザーが作業領域の参照座標系を定義することを可能にし、ツール座標系はツール末端の位置と姿勢を定義します。
KUKA
KUKAロボットでは[X, Y, Z, A, B, C]フォーマットを採用し、zyxオイラー角で姿勢を表現します。KUKAシステムはPOSITION、XYZWPR、XYZWPREXT、JOINTPOSとPATHなどのデータタイプで位置データを表現します。
KUKAのPOSITIONデータタイプは以下のコンポーネントを含みます:
コンポーネントタイプ |
数量 |
単位 |
説明 |
REAL値(位置) |
3個 |
ミリメートル |
X、Y、Z位置座標を表現 |
REAL値(方向) |
3個 |
度(degree) |
W、P、R方向角度を表現 |
CONFIGデータタイプ |
1個 |
4個のブール値と3個の整数から構成され、関節位置と旋回数の構成を代表 |
|
ROKAE
ROKAEロボットでは[X, Y, Z, q1, q2, q3, q4]フォーマットを採用し、単位四元数で姿勢を表現します。その中でq1は単位四元数実部、q2、q3、q4はそれぞれxyz方向の虚部で、ABBのフォーマットと類似しています。
速度データフォーマット
ロボット速度データはロボット運動の速さの程度を定義し、関節空間速度とデカルト空間速度の二つのタイプを含みます。異なるメーカーは速度データの表現と制御において異なる戦略を採用しています。
ABB
ABBはspeeddataデータタイプを使用してロボット運動の速度パラメータを定義します。このデータタイプは四つの主要コンポーネントを含みます:v_tcp(ツール中心点速度、単位mm/s)、v_ori(TCP再定位速度、度/秒で表現)、v_leax(線形外部軸速度、単位mm/s)とv_reax(回転外部軸速度、度/秒で表現)。
ABBのspeeddataデータタイプは以下のコンポーネントを含みます:
| コンポーネント名 | データタイプ | 単位 | 説明 |
|---|---|---|---|
v_tcp |
num |
mm/s |
ツール中心点の速度。固定ツールまたは協調外軸を使用する場合、ワークに対する相対速度を規定 |
v_ori |
num |
°/s |
TCPの再定位速度。固定ツールまたは協調を使用する場合、ワークに対する相対速度を規定 |
v_leax |
num |
mm/s |
線形外軸の速度 |
v_reax |
num |
°/s |
回転外軸の速度 |
システムはロボットアームと外軸移動用の速度データを事前定義しており、具体的には以下の通りです:
| 名称 | TCP速度 | 方向 | 線形外軸 | 回転外軸 |
|---|---|---|---|---|
v5 |
5 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v10 |
10 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v20 |
20 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v30 |
30 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v40 |
40 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v50 |
50 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v60 |
60 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v80 |
80 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v100 |
100 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v150 |
150 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v200 |
200 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v300 |
300 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v400 |
400 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v500 |
500 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v600 |
600 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v800 |
800 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v1000 |
1000 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v1500 |
1500 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v2000 |
2000 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v2500 |
2500 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v3000 |
3000 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v4000 |
4000 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v5000 |
5000 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v6000 |
6000 mm/s |
500°/s |
5000 mm/s |
1000°/s |
v7000 |
7000 mm/s |
500°/s |
5000 mm/s |
1000°/s |
vmax |
ロボットモデルに依存 |
500°/s |
5000 mm/s |
1000°/s |
FANUC
移動速度制御:
FANUCは複数の移動速度制御方式をサポートし、移動中は実行プログラムの関節補間と直線補間運動に移動倍率を規定できます。移動倍率範囲値は1~100%です。移動中も実行プログラム速度を設定値から減速処理で実行できます。
移動速度は以下の表現方法があります:
-
パーセンテージ表現(%):最大速度に対する相対パーセンテージ、位置変数は不要、補助機能を使用しない。
-
時間表現(秒):0.1~3600秒の範囲で四桁小数で指定可能。移動時間は加速と減速時間を含み、PTP移動時はすべての関節が指定時間同時に移動。
-
速度表現(mm/sec):0.1~32000mm/secの範囲で直角座標系速度を指定可能。
-
送り速度表現(cm/min):0.1~12000cm/minの範囲で送り速度を指定可能。
運動タイプ制御:
FANUCは柔軟な運動制御方式を提供し、関節補間運動と直線補間運動をサポートします:
-
関節補間運動(JP):例えばJP[1] 50% FINEは50%速度精密位置決めを表現
-
直線補間運動(LP):例えばLP[1] 100mm/sec FINEは線形運動100mm/s精密位置決めを表現
-
円弧補間運動(CP):円弧軌跡運動制御に使用
YASKAWA
YASKAWAロボットは三つの主要運動方式をサポートします:MOVJ(関節補間)、MOVL(直線補間)、MOVC(円弧補間)、各方式にはそれぞれ専用パラメータと速度単位があります。
MOVJ |
機能 |
関節補間方式で教示位置に移動。 |
|
追加項目 |
位置データ、ベース軸位置データ、ツール軸位置データ |
画面に表示されない |
|
VJ=(再現速度) |
VJ:0.01~100.00% |
||
PL=(位置決めレベル) |
PL:0~8 |
||
NWAIT |
|||
UNTIL 文 |
|||
ACC=(加速度調整比率) |
ACC:20~100% |
||
DEC=(減速度調整比率) |
DEC:20~100% |
||
使用例 |
MOVJ VJ=50.00 PL=2 NWAIT UNTIL IN#(16)=ON |
||
MOVL |
機能 |
直線補間方式で教示位置に移動。 |
|
追加項目 |
位置データ、ベース軸データ、ツール軸位置データ |
画面に表示されない |
|
V=(再現速度)、 VR=(姿勢の再現速度)、 VE=(外部軸の再現速度、 VMAX=(VMAX速度) |
V:0.1~1500.0 mm/秒+1~9000cm/分、 VR:0.1~360.0度/秒、 VE:0.01~100.00%、 VMAX:50~100% |
||
PL=(位置決めレベル) |
PL:0~8 |
||
CR=(コーナー半径) |
CR:0.1~6563.5mm |
||
NWAIT |
|||
UNTIL 文 |
|||
ACC=(加速度調整比率) |
ACC:20~100% |
||
DEC=(減速度調整比率) |
DEC:20~100% |
||
使用例 |
MOVL V=138 PL=0 NWAIT UNTIL IN#(16)=ON |
||
MOVC |
機能 |
円弧補間方式で教示位置に移動。 |
|
追加項目 |
位置データ、ベース軸データ、ツール軸位置データ |
画面に表示されない。 |
|
V=(再現速度)、VR=(姿勢角再現速度)、VE=(外部軸再現速度) |
MOVLと同じ。 |
||
PL=(位置決めレベル) |
PL:0~8 |
||
NWAIT |
|||
ACC=(加速度調整比率) |
ACC:20~100% |
||
DEC=(減速度調整比率) |
DEC:20~100% |
||
COORD=(円弧姿勢制御指定) |
COORD:0~1 |
||
FPT:円弧終点指定 |
|||
使用例 |
MOVC V=138 PL=0 NWAIT |
||
|
現在我々は速度データをD変数に書き込んでいるため、ロボット実行速度と下図表示の実際と一致しない。 |
KUKA
KUKAロボットは三つの主要運動タイプをサポートします:PTP(ポイントツーポイント運動)、LIN(直線運動)とCIRC(円弧運動)、各運動タイプにはそれぞれ相応の速度パラメータ設定方式があります。
PTP:
PTP運動は関節空間運動を採用し、各軸の速度パーセンテージを制御することで精密位置決めを実現します。
| パラメータタイプ | パラメータ名 | 取値範囲 | 説明 |
|---|---|---|---|
速度制御 |
$VEL_AXIS[x] |
1~100% |
各軸の速度パーセンテージを制御 |
加速度制御 |
$ACC_AXIS[x] |
システム定義 |
各軸に対する加速度制御 |
LIN/CIRC:
軌跡運動はデカルト空間運動を採用し、速度パラメータがより豊富で、線形速度と姿勢速度の独立制御をサポートします。
| パラメータタイプ | パラメータ名 | 単位 | 説明 |
|---|---|---|---|
速度制御 |
$VEL.CP |
m/s |
軌跡速度、TCPの空間における線形運動速度を制御 |
$VEL.ORI1 |
°/s |
回転速度、AとB軸回りの姿勢回転速度を制御 |
|
$VEL.ORI2 |
°/s |
転速、C軸(ツールX軸)回りの回転速度を制御 |
|
加速度制御 |
$ACC.CP |
m/s² |
軌跡加速度、線形運動の加減速を制御 |
$ACC.ORI1 |
°/s² |
回転加速度、姿勢変化の加減速を制御 |
|
$ACC.ORI2 |
°/s² |
転速加速度、ツール軸回りの回転の加減速を制御 |
ROKAE
ROKAEロボットシステムは統一されたspeed指令を提供してロボットの運動速度を制御し、この指令はロボットと外部軸の運動速度を定義します。
speed指令は以下の核心パラメータを含みます:
パラメータ名 |
データタイプ |
パラメータ説明 |
取値範囲 |
per |
double |
関節速度パーセンテージ、関節運動時の運動速度を指定、MoveAbsJとMoveJなどのコマンドに適用 |
1% ~ 100% |
tcp |
double |
TCP線速度、ツール中心点の線速度を定義 |
0.001 mm/s ~ 7000 mm/s |
ori |
double |
空間回転速度、ツールの回転速度を定義 |
0.001°/s ~ 500°/s |
exj_l |
double |
外部軸線速度、外部直線軸の運動速度を定義 |
0 mm/s ~ 2000 mm/s |
exj_r |
double |
外部軸角速度、外部回転軸の運動速度を定義 |
0°/s ~ 300°/s |
システムは常用の速度変数を事前定義しており、具体的には以下の通りです:
| 名称 | 関節速度パーセンテージ | TCP線速度 | 空間回転速度 | 外部軸角速度 | 外部軸線速度 |
|---|---|---|---|---|---|
v5 |
1% |
5 mm/s |
200°/s |
0°/s |
0 mm/s |
v10 |
3% |
10 mm/s |
200°/s |
0°/s |
0 mm/s |
v25 |
5% |
25 mm/s |
200°/s |
0°/s |
0 mm/s |
v30 |
5% |
30 mm/s |
200°/s |
0°/s |
0 mm/s |
v40 |
5% |
40 mm/s |
200°/s |
0°/s |
0 mm/s |
v50 |
5% |
50 mm/s |
200°/s |
0°/s |
0 mm/s |
v60 |
8% |
60 mm/s |
200°/s |
0°/s |
0 mm/s |
v80 |
8% |
80 mm/s |
200°/s |
0°/s |
0 mm/s |
v100 |
10% |
100 mm/s |
200°/s |
0°/s |
0 mm/s |
v150 |
15% |
150 mm/s |
200°/s |
0°/s |
0 mm/s |
v200 |
20% |
200 mm/s |
200°/s |
0°/s |
0 mm/s |
v300 |
30% |
300 mm/s |
200°/s |
0°/s |
0 mm/s |
v400 |
40% |
400 mm/s |
200°/s |
0°/s |
0 mm/s |
v500 |
50% |
500 mm/s |
200°/s |
0°/s |
0 mm/s |
v600 |
60% |
600 mm/s |
200°/s |
0°/s |
0 mm/s |
v800 |
70% |
800 mm/s |
200°/s |
0°/s |
0 mm/s |
v1000 |
100% |
1000 mm/s |
200°/s |
0°/s |
0 mm/s |
v1500 |
100% |
1500 mm/s |
200°/s |
0°/s |
0 mm/s |
v2000 |
100% |
2000 mm/s |
200°/s |
0°/s |
0 mm/s |
v3000 |
100% |
3000 mm/s |
200°/s |
0°/s |
0 mm/s |
v4000 |
100% |
4000 mm/s |
200°/s |
0°/s |
0 mm/s |
v5000 |
100% |
5000 mm/s |
200°/s |
0°/s |
0 mm/s |
v6000 |
100% |
6000 mm/s |
200°/s |
0°/s |
0 mm/s |
v7000 |
100% |
7000 mm/s |
200°/s |
0°/s |
0 mm/s |
コーナー領域データ
コーナー領域データはロボットの経路点間のスムーズな遷移方式を定義し、連続的で効率的なロボット運動の実現にとって極めて重要です。異なるメーカーは異なるコーナー処理戦略を採用しています。
ABB
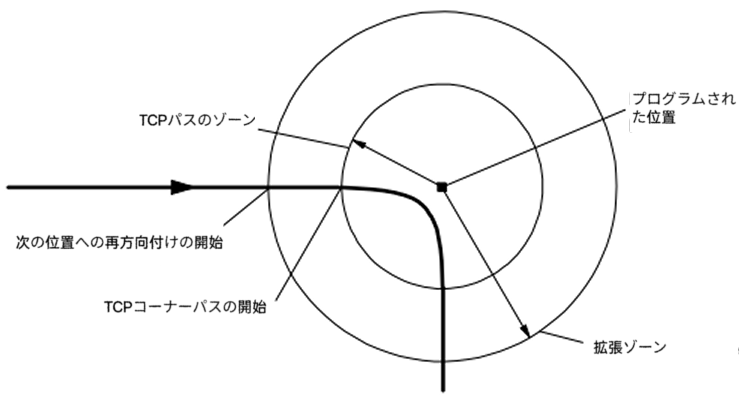
ABBロボットはzonedataデータタイプを使用してコーナー領域パラメータを定義し、このデータタイプはロボットの経路点における運動行動を決定します。コーナー領域パラメータはロボットが目標位置で完全停止(精密位置決め)するか、フライバイポイントの形式で目標位置をスムーズに通過するかを制御できます。
ABBのzonedataデータタイプは以下のコンポーネントを含みます:
コンポーネント名 |
データタイプ |
説明 |
finep |
bool |
運動が停止点またはフライバイポイントで終了するかを規定。TRUEは運動が停止点で終了し、プログラム実行はロボットアームが停止点に到達するまで継続しないことを表現。FALSEは運動がフライバイポイントで終了し、プログラム実行が継続することを表現。 |
pzone_tcp |
num |
TCP区域の半径(ミリメートル)、拡張区域を区域の最小相対サイズとして定義 |
pzone_ori |
num |
ツール再定位の区域半径(ミリメートル)、TCPからプログラム点までの距離として半径を定義 |
pzone_eax |
num |
外軸の区域半径(ミリメートル)、TCPからプログラム点までの距離として半径を定義 |
zone_ori |
num |
ツール再定位の区域半径(度(degree))、ロボットアームが正しくワークを把持している場合、ワークに関する回転角を意味 |
zone_leax |
num |
線形外軸の区域半径(ミリメートル) |
zone_reax |
num |
回転外軸の区域半径(度(degree)) |
システムは常用のコーナー領域配置を事前定義しており、具体的には以下の通りです:
経路区域 |
Zone |
|||||
名称 |
TCP経路 |
方向 |
外軸 |
方向 |
線形軸 |
回転軸 |
fine |
0 mm |
0 mm |
0 mm |
0° |
0 mm |
0° |
z0 |
0.3 mm |
0.3 mm |
0.3 mm |
0.03° |
0.3 mm |
0.03° |
z1 |
1 mm |
1 mm |
1 mm |
0.1° |
1 mm |
0.1° |
z5 |
5 mm |
8 mm |
8 mm |
0.8° |
8 mm |
0.8° |
z10 |
10 mm |
15 mm |
15 mm |
1.5° |
15 mm |
1.5° |
z15 |
15 mm |
23 mm |
23 mm |
2.3° |
23 mm |
2.3° |
z20 |
20 mm |
30 mm |
30 mm |
3.0° |
30 mm |
3.0° |
z30 |
30 mm |
45 mm |
45 mm |
4.5° |
45 mm |
4.5° |
z40 |
40 mm |
60 mm |
60 mm |
6.0° |
60 mm |
6.0° |
z50 |
50 mm |
75 mm |
75 mm |
7.5° |
75 mm |
7.5° |
z60 |
60 mm |
90 mm |
90 mm |
9.0° |
90 mm |
9.0° |
z80 |
80 mm |
120 mm |
120 mm |
12° |
120 mm |
12° |
z100 |
100 mm |
150 mm |
150 mm |
15° |
150 mm |
15° |
z150 |
150 mm |
225 mm |
225 mm |
23° |
225 mm |
23° |
z200 |
200 mm |
300 mm |
300 mm |
30° |
300 mm |
30° |
コーナー領域データのデータ構造は以下の通りです:
< data object of zonedata >
< finep of bool >
< pzone_tcp of num >
< pzone_ori of num >
< pzone_eax of num >
< zone_ori of num >
< zone_leax of num >
< zone_reax of num >FANUC
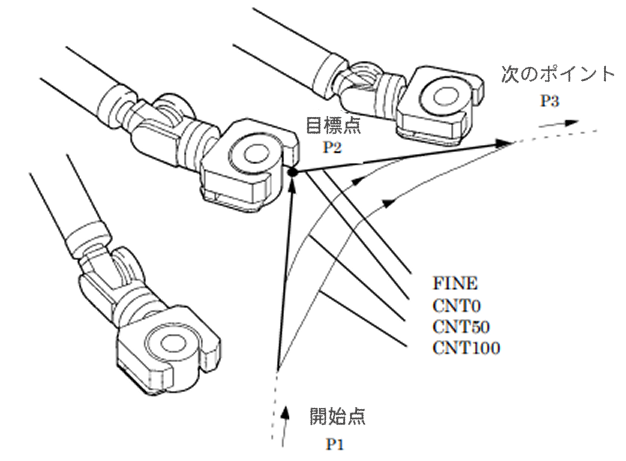
FANUCシステムは二つの主要な位置決めタイプを提供します:FINE(精密位置決め)とCNT(連続位置決め)。FINE位置決めタイプはロボットが目標位置で完全停止した後、次の目標位置移動に向かうことを要求します。CNT位置決めタイプはロボットが目標位置に接近するが、その位置で停止せずに次の位置運動作業を行うことを許可します。
YASKAWA
YASKAWAは位置決めレベルPLとコーナー半径CRを採用してコーナー領域を制御します。システムはFINE位置決めタイプ(ロボットが目標位置で完全停止後、次の目標位置に向かって移動)とCNT位置決めタイプ(ロボットが目標位置に接近するが、その位置で停止せずに次の位置運動作業を行う)を提供します。
KUKA
KUKAロボットは複数の軌跡近似パラメータを使用してコーナー動作を制御し、異なる運動タイプは異なる近似戦略を採用します。システムはPTP(ポイントツーポイント)、LIN(直線)とCIRC(円弧)の三つの運動方式をサポートし、各運動方式にはそれぞれ相応の軌跡近似配置があります。
運動方式と軌跡近似パラメータ:
| 運動方式 | 適用パラメータ | 説明 |
|---|---|---|
PTP |
C_PTP |
PTP運動のみに使用される軌跡近似、目標点を軌跡近似させる。PTP-PTP軌跡近似ではC_PTpパラメータのみ必要 |
PTP-CP |
C_DIS, C_ORI, C_VEL |
PTpからデカルト経路への軌跡近似、複数パラメータの組み合わせ使用可能 |
LIN/CIRC |
C_DIS, C_ORI, C_VEL |
デカルト経路運動の軌跡近似、距離、姿勢と速度パラメータをサポート |
軌跡近似パラメータ詳解:
| パラメータ名 | 適用運動 | 単位 | パラメータ説明 |
|---|---|---|---|
C_PTP |
PTP |
% |
PTP運動の軌跡近似パーセンテージを定義、どの程度まで目標点に近似するかを制御 |
C_DIS |
LIN/CIRC/PTP-CP |
mm |
距離パラメータ、軌跡近似は最早でも目標点との距離が$APO.CDIS値以下の時に開始 |
C_ORI |
LIN/CIRC |
° |
姿勢パラメータ、軌跡近似は最早でも主導姿勢角が$APO.CORI値以下の時に開始 |
C_VEL |
LIN/CIRC |
% |
速度パラメータ、軌跡近似は最早でも目標点に向かう減速段階で速度が$APO.CVEL値以下の時に開始 |
運動組み合わせとパラメータ使用:
-
PTP単独運動:C_PTpパラメータのみ使用、$APO.CPTpで近似パーセンテージを設定
-
PTP-CP組み合わせ運動:C_DIS、C_ORI、C_VELパラメータを使用可能、ポイントツーポイント運動からデカルト経路へのスムーズな遷移を実現
-
LIN/CIRC運動:C_DIS、C_ORI、C_VEL三つのパラメータの組み合わせ使用をサポート、精密な軌跡制御を実現
|
実際の応用において:
|
ROKAE
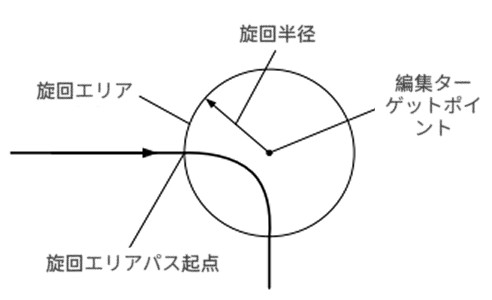
ROKAEロボットは複数のスムーズ遷移距離の設定方式を提供します。zone変数は某運動間隔を定義するか、または変数で二つの運動軌跡間のコーナー領域のサイズを定義するために使用されます。停止処理時、ロボットは目標点まで運動し、目標点到達時の速度は0で、その後次の指令の実行を継続します。遷移処理時、ロボットは目標点まで運動せず、目標点からdistanceミリメートル離れた場所から、次の目標点への運動に向かって転回を開始します。
ROKAEシステムは常用のコーナー領域変数を事前定義しており、その中でデカルト空間コーナー領域サイズとコーナーパーセンテージには直接的な対応関係があります:
名称 |
デカルト空間コーナー領域サイズ |
コーナーパーセンテージ |
fine |
0 mm |
0% |
z1 |
1 mm |
1% |
z5 |
5 mm |
3% |
z10 |
10 mm |
5% |
z15 |
15 mm |
8% |
z20 |
20 mm |
10% |
z30 |
30 mm |
15% |
z40 |
40 mm |
20% |
z50 |
50 mm |
25% |
z60 |
60 mm |
30% |
z80 |
80 mm |
40% |
z100 |
100 mm |
50% |
z150 |
150 mm |
75% |
z200 |
200 mm |
100% |
UR
URロボットは経路計画においてコーナー領域(Blend Region)機能をサポートし、コーナー半径パラメータr(単位:m)を設定することでスムーズな軌跡遷移を実現します。経路点にコーナー半径を設定すると、ロボットはその点で完全停止せず、円弧軌跡で次の経路段階にスムーズに遷移します。
ロボットがコーナー半径を設定した後、軌跡は経路点付近で円弧遷移を形成し、急停止急発進現象を回避します。円弧の半径サイズは軌跡のスムーズさと元の経路からの偏離距離に直接影響します。小さなコーナー半径は元の経路点により近づけますが、運動が十分スムーズではありません;大きなコーナー半径は運動がより流暢ですが、予期軌跡からより多く偏離します。
隣接経路点のコーナー領域が重複する時、状況は複雑になります。現在の経路点のコーナー領域が前または後の経路点のコーナー半径と重複が生じる場合、システムは中間の経路点をスキップし、直接次の有効点に接続します。
|
コーナー領域パラメータの設定は二つの運動点間の距離サイズと直接関係があり、ロボット運動のスムーズさと効率を確保するため合理的に設定する必要があります。 |
ロボットアーム構成データ
ロボットアーム構成データはロボットの正確な運動制御にとって極めて重要で、ロボット関節の現在状態と運動制約を定義します。このデータは設定不当によりビジョンポイント位置が到達不可能な問題を引き起こすことがよくあります。
ABB
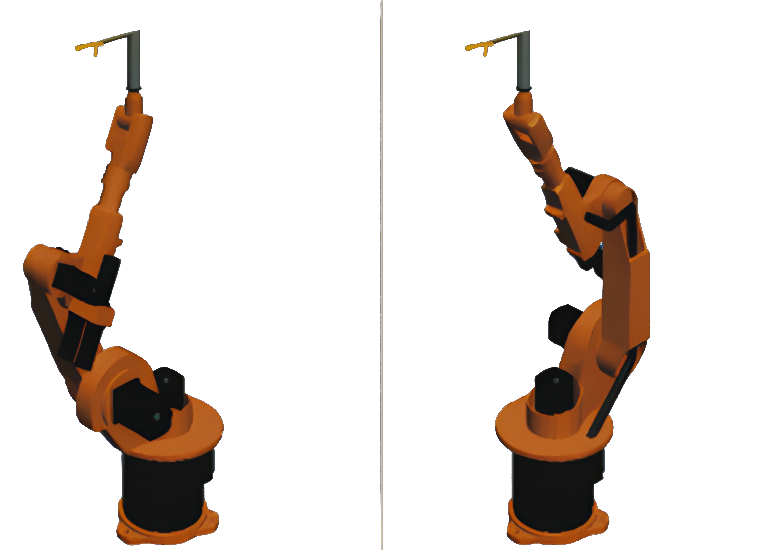
ABBはconfdataデータタイプを使用してロボットの軸構成を定義します。直角座標系を使用することで、ロボットアームのすべての位置を定義し保存できます。ロボットアームの解決方案を計算する時、通常二つまたはそれ以上の解決方案が存在する可能性があり、これらの状況はロボットアームが複数の異なる位置または構成を持てることです。可能な構成の一つを明確に表現するため、四つの軸の値を使用してロボット構成を定義します。
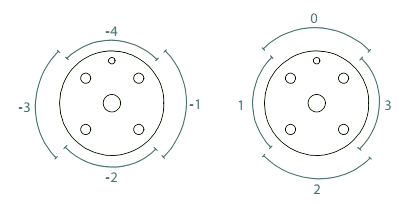
回転軸について、その値はロボット軸の現在象限を定義します。象限は0、1、2などで番号付けされ、負もあり、象限番号は軸の現在関係と関連があります。6軸ロボットについて、象限0はゼロ位置から180°までの最初の四分円、即ち0°から90°;象限1は第二の四分円、即ち90°から180°、以下同様です。
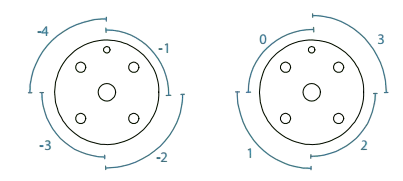
7軸ロボットについて、象限0はゼロ位置を中心として回転する四分円、即ち-45°から45°;象限1は正方向回転の第二四分円、即ち45°から135°、以下同様です。
線形軸について、その値はロボット軸に関する問題来数を説明します。各軸について、値0は0から1メートル間の位置を意味し、値1は1から2メートル間の位置を意味し、負値について、-1は-1から0メートル間の位置を意味し、以下同様です。

構成監督:
一部のロボット種型について、ConfL\Onが設定されている場合、構成データ(confdata)も線形移動に関するプログラム点変監督に使用されます。ConfL\Onを使用しない構成監督の実行は、Confl-関節移動期間中の構成制御のようです。
指定運動開始前に、プログラム構成の実現可能性を検査する検証を行います。不可能な場合、プログラムを停止し、運動完了時(区域または精点中)、同時にロボットがプログラム構成に到達したことを検証します。ConfL\Onの構成監督は異なるロボットで異なります。
| ロボットアームタイプ | 構成監督内容 |
|---|---|
6軸ロボットアーム |
第1、4と6軸が180度以上移動しないか、またその有序移動がcfx変更を必要としないかを検査(cfxはシリアル接続ロボットのみに使用され、並列リンクロボットには適用されない) |
4軸ロボットアーム |
軸1と6が180度以上移動しないかを検査 |
並列アームロボット(Delta型ロボット) |
軸4が180度以上移動しないかを検査 |
SCARAロボット |
軸1と4が180度を超えて移動しないか検査し、軸2の標識も核実 |
7軸ロボットアーム |
軸1、4と6が180度以上移動しないか、また安排された移動がcfx変更を必要としないかを検査 |
塗装ロボットアーム |
いかなる構成監督も実施しない |
ロボットアーム構成データ:
-
シリアルライン付き6軸ロボットアーム
ロボット作業範囲内に三つの象界点が存在し、即ちcf1は軸1の象限番号、cf4は軸4の象限番号、cf6は軸6の象限番号です。
cfxは番号0から7の八つの可能なロボット構成から一つを選択するために使用されます。下表は三つの象界点に対してロボットをどのように配置するかの各種構成を記述しています
cfx
軸1の脳中心に対して
下臀の脳中心に対して
軸5角
0
前面に
前面に
正
1
前面に
前面に
負
2
前面に
後面に
正
3
前面に
後面に
負
4
後面に
前面に
正
5
後面に
前面に
負
6
後面に
後面に
正
7
後面に
後面に
負
-
平行桿付き6軸ロボットアーム:構成パラメータcf1、cf4とcf6のみ使用。
-
4軸ロボットアーム:構成パラメータcf6のみ使用。
-
平行アームロボットアーム:構成パラメータcf4のみ使用。
-
SCARAロボット:三つの構成パラメータcf1、cf4とcfxのみ使用。cfx値を採用して軸2角度の標識を展示。軸2角度が負の場合、cfxは1、そうでなければcfxは0。
-
7軸ロボット:四つの構成パラメータを運用、cf1、cf4とcf6はそれぞれ関節1、4と6に使用、cfxは8つの可能なロボット構成から一つを選択するために使用。方法は他のロボット時と類似。
cfx
軸2角度
下アームの腕中心に対して
軸5角度
0
正
前面に
正
1
正
前面に
負
2
正
後面に
正
3
正
後面に
負
4
負
前面に
正
5
負
前面に
負
6
負
後面に
正
7
負
後面に
負
-
塗装ロボットアーム:四つの構成パラメータすべてを使用。インターフェース1、4と6にそれぞれcf1、cf4、cf6を使用し、インターフェース5にcfxを使用。
-
IRB 5500:四つの構成パラメータすべてを使用。インターフェース1、4と6にそれぞれcf1、cf4、cf6を使用、cfxパラメータはインターフェース5象限号および軸2と軸3に関する四つの可能な構成を含む。
-
IRB 5350:ロボットアームは二つの回転軸(アーム1とアーム2)と一つの線形軸(アーム3)を有します。cf1はインターフェース転軸1に使用、cfxはインターフェース転軸2に使用、cf4とcf6は使用しない。
コンポーネント:
| コンポーネント | データタイプ | 回転軸 | 線形軸 |
|---|---|---|---|
cf1 |
num |
軸1の現在象限、正の整数または負の整数として表現 |
軸1の現在間隔メートル数、正の整数または負の整数として表現 |
cf4 |
num |
軸4の現在象限、正の整数または負の整数として表現 |
軸4の現在間隔メートル数、正の整数または負の整数として表現 |
cf6 |
num |
軸6の現在象限、正の整数または負の整数として表現 |
軸6の現在間隔メートル数、正の整数または負の整数として表現 |
cfx |
num |
シリアルラインロボットアームと7軸ロボットについて、ロボットアーム構成が0から7範囲の一つの整数として表現。 + SCARAロボットについて、ロボットアーム構成が0から1範囲の一つの整数として表現。 + 塗装ロボットアームについて、軸5の現在象限が正の整数または負の整数として表現。 + その他のロボットアームについて、軸2の現在象限を使用、正の整数または負の整数として表現。 |
軸2の現在間隔メートル数、正の整数または負の整数として表現 |
FANUC
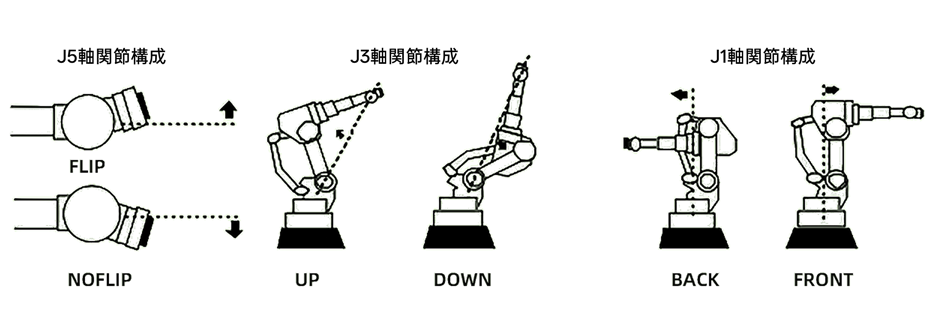
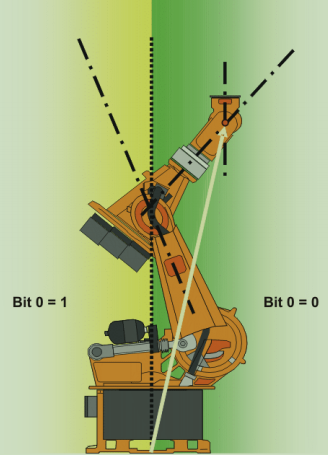
FANUCロボットは形態を使用してロボット各関節の位置状態を指定します。形態はロボット主体部分の姿勢を指し、与えられた直角座標値(X、Y、Z、W、P、R)について、通常条件を満たす複数の形態解が存在します。唯一のロボット位置を確定するため、各軸の関節構成と回転数を明確に指定する必要があります。
FANUCシステムはロボットの関節構成を以下の基本タイプに分類します:
主要構成状態:
構成項目 |
状態値 |
説明 |
FLIP/NOFLIP |
LEFT/RIGHT |
ロボット手首(J5軸)の反転状態を指示、ツールの向きを決定 |
UP/DOWN |
FRONT/BACK |
ロボットアーム(J3軸)の上下構成を表現、ロボットの作業空間利用に影響 |
肘関節状態 |
UPPER/LOWER |
ロボット肘部(J2とJ3軸組み合わせ)の構成状態を記述 |
回転数範囲定義:
FANUCシステムは回転数を使用して回転軸が±180°を超える状況を処理します:
回転数値 |
角度範囲 |
説明 |
1 |
180°~539° |
正方向一回転を超える角度範囲 |
0 |
-179°~179° |
標準角度範囲、回転なし |
-1 |
-539°~-180° |
負方向一回転を超える角度範囲 |
FANUCシステムは専用のシステム変数を使用して回転軸の状態を管理・追跡します:
回転軸状態変数:
システム変数 |
機能 |
応用説明 |
$SSCR_GRP[group].$TURN_AXIS[1] |
第1軸(ベース回転軸)の回転状態を管理 |
J1軸の回転数情報を記録、多回転回転位置を区別するために使用 |
$SSCR_GRP[group].$TURN_AXIS[2] |
第2軸(肩部軸)の回転状態を管理 |
J2軸の回転数情報を記録、アームの構成に影響 |
$SSCR_GRP[group].$TURN_AXIS[3] |
第3軸(肘部軸)の回転状態を管理 |
J3軸の回転数情報を記録、肘部の上下構成を決定 |
形態データ構造:
データコンポーネント |
データタイプ |
説明 |
関節位置 |
JOINTPOS |
すべての関節の角度値、度(degree)を単位とする |
構成フラグ |
CONFIG |
ロボットの現在構成状態(FLIP、UPなど)を記述 |
回転情報 |
TURN |
各軸の回転数、多回転回転を処理するために使用 |
有効性フラグ |
STATUS |
その形態が有効で到達可能かを指示 |
YASKAWA
YASKAWAロボットは[fig_ctrl]を使用して姿勢情報のポインタ(出力)を指向します。構文は:
typedef unsigned int BITSTRING;ビット |
説明 |
D00 |
0:Front 1:Back |
D01 |
0:Upper arm 1:Lower arm |
D02 |
0:Fli p 1:No flip |
D03 |
0:R<180 1:R>=180 |
D04 |
0:T<180 1:T>=180 |
D05 |
0:S<180 1:S>=180 |
D06-D31 |
Reserved by manufacturer |
KUKA
KUKAロボットはPOSITION、XYZWPR、XYZWPREXT、JOINTPOSとPATHなどのデータタイプを使用して位置データを表現します。POSITIONデータタイプはミリメートル単位のX、Y、Z位値を表現する三つのREAL値、度(degree)単位のW、P、R方向を表現する三つのREAL値、4個のブール値と3個の整数から構成されるCONFIGデータタイプを含み、関節位置とコーナー数の構成を代表します。
KUKAロボットの構成データはSTATUSとTURNコンポーネントを通じて定義されます。TCP位置(X、Y、Z)と姿勢(A、B、C)の数値だけではロボットの位置を明確に規定するのに不十分です。TCPが同じでも、確の位置は複数存在する可能性があるためです。状態とコーナー方向は複数の可能な軸位置から一つの唯一位置を確定するために使用されます。
STATUS
ビット0:頂上領域検出
軸1が0°にある時、A1座標系は$ROBROOT座標系と同じです。値が0°と等しくない時、A1座標系は軸1と共に動きます。
位置 |
値 |
頂上領域 |
ビット位0=1 |
基本領域 |
ビット0=0 |
軸1が0°にある時、A1座標系は$ROBROOT座標系と同じで、値が0°と等しくない時、A1座標系は軸1と共に動きます。
ビット1:軸3の位置を与える
ビット位1値変更時の対応角はロボットタイプに依存します。軸3と軸4相関のロボットについて、適用:
位置 |
値 |
A3≥0° |
ビット1 =1 |
A3<0° |
ビット位1=0 |
軸3と軸4がずれているロボットについて、ビット位1変更時の対応角はオフセット量のサイズに依存します。
ビット2:軸5の位置を与える
位置 |
値 |
A5>0 |
ビット位2=1 |
A5≤0 |
ビット位2=0 |
ビット3:未使用、常に0。
ビット4:駆動タイプ標識
絶対精密なロボットでポイントを教示したかを説明します。
説明 |
値 |
このポイントは絶対精密なロボットで教示されていない |
ビット位4=0 |
このポイントは絶対精密なロボットで教示済み |
ビット位4=1 |