絶対位置決め精度の誤差
はじめに
産業用ロボットがタスクを実行する際、その位置決め能力はロボットの性能を測る重要な指標の一つです。ロボットの位置決め精度は主に絶対精度と繰り返し精度の二つの面に分けられます。
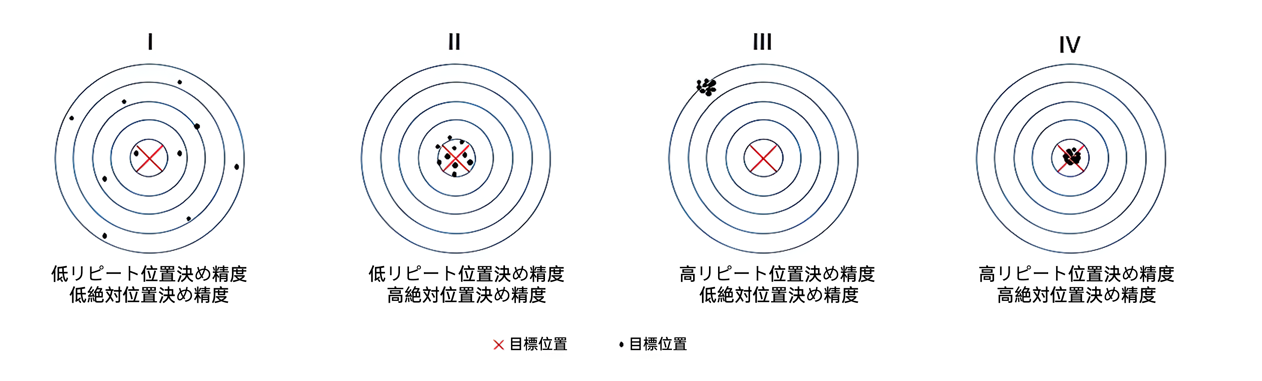
絶対精度とは、ロボットハンドが実際に到達した姿勢と到達すべき理想的な姿勢との差を指します。これは参照系に対する絶対的な測定値であり、ロボットシステム全体の位置決め精度を反映します。ロボットに目標姿勢指令を送信した際、最終的に到達した実際の姿勢と理論的な目標姿勢との間の偏差が絶対精度誤差となります。
繰り返し精度とは、同じ運動姿勢指令下でロボットが連続して何度か運動した軌道間の誤差測定値を指します。ロボットがある姿勢指定指令を繰り返し実行する場合、毎回移動する距離は同じではなく、平均値の周りで変化します。この平均値が絶対精度を表し、変化の幅が繰り返し精度を表します。この指標はロボットシステムの安定性と一貫性を反映します。絶対精度に偏差があっても、ロボットの毎回の偏差が比較的一貫している場合、その繰り返し精度は依然として高い可能性があります。
絶対精度に影響する主な要因
-
機械構造の製造精度:関節の隙間の大きさが伝動精度に直接影響し、伝動システムの減速器、カップリングなどの部品の製造誤差が累積効果を生み、機械アーム自体の剛性不足は負荷作用下で変形を生じます。これらの物理特性がロボットの基本位置決め能力の上限を共同で決定します。
-
制御システムの精度:エンコーダの分解能が姿勢フィードバックの精細度を決定し、分解能が高いほど姿勢検出がより正確になります。制御アルゴリズムの数値計算精度、補間アルゴリズムの正確性、およびサーボシステムの動的応答特性はすべて最終的な位置決め精度に直接影響します。特に多軸連動時には、各軸の制御誤差が重畳効果を生じる可能性があります。
-
環境要因:温度変化による熱膨張・収縮がロボットの幾何寸法と関節パラメータを変化させ、特に大型ロボットではこの影響がより顕著です。作業現場の振動がロボットの安定性を妨害し、電磁干渉がエンコーダ信号と制御システムの正常な動作に影響を与え、間接的に位置決め精度に影響します。
絶対精度を向上させる方法
-
ロボットキャリブレーション:キャリブレーションを通じて運動学パラメータ誤差を識別・補償し、リンク長、関節オフセット、伝達比などのパラメータ偏差を含みます。現代の産業用ロボットは通常キャリブレーション機能を備えており、実際の必要に応じて再キャリブレーションして精度を回復できます。
-
外部センサクローズドループ制御:視覚システム、レーザ測距などの高精度センサを利用してロボット姿勢をリアルタイムでモニタリングし、クローズドループフィードバック制御を形成します。この方法はシステム誤差をリアルタイムで補償でき、特に高精度アプリケーションに適用されます。
-
定期的なメンテナンス:規範的なメンテナンス計画を確立し、摩耗した機械部品を適時交換し、伝動システムの良好な潤滑を保持し、制御システムの安定な運転を確保します。