路径规划参数说明
运动规划器
规划器类型
在右侧下拉列表中选择规划器,运动规划器有以下选择:
关节空间规划器
关节空间规划器直接在机器人的关节空间中进行路径规划。主要特点包括:
-
精确控制:适用于机器人关节的精确控制。
-
复杂性:在高维关节空间中,搜索可能比较复杂。
-
适用性:适用于机器人臂等需要精确关节运动的应用。
直线规划器
线性规划器沿着直线进行路径规划,通常用于简单的直线运动。主要特点包括:
-
简单快速:适用于简单环境,计算速度快。
-
路径直线:生成的路径为直线,适用于没有障碍物的环境。
-
局限性:不适用于复杂环境中的路径规划。
贝塞尔曲线规划器
贝塞尔曲线规划器使用贝塞尔曲线生成平滑路径。主要特点包括:
-
平滑路径:生成的路径平滑,适用于对路径平滑度有要求的应用。
-
复杂计算:计算复杂度较高,适用于精确控制和需要平滑路径的环境。
-
灵活性:能够生成各种形状的曲线路径。
快速随机树规划器
快速随机树是一种通过随机采样来逐步扩展树结构的路径规划器。它特别适用于高维空间中的路径搜索问题。主要特点包括:
-
高效探索:能够快速覆盖大范围的搜索空间。
-
简单实现:算法实现相对简单。
-
随机性:路径不稳定,每次运行结果可能不同。
最大尝试次数
规划器在搜索路径时允许的最大迭代次数。为了防止规划器陷入无限循环,需要设置一个最大尝试次数。
-
较高值:适用于复杂环境,可以增加找到可行路径的概率,但计算时间也会增加。
-
较低值:适用于简单环境,可以快速结束搜索,节省计算资源。
采样边界补偿
采样边界补偿指的是在起始点与目标点之间的空间立方体的边界向外扩展的距离。这一扩展距离的大小会影响搜索空间的范围。
-
较大值:当补偿值较大时,空间立方体的边界向外扩展更多,搜索空间变大。
-
较小值:当补偿值较小时,空间立方体的边界向外扩展较少,搜索空间变小。
回撤路径规划
类型 |
说明 |
|---|---|
不规划回撤路径 |
仅规划起始规划点到预抓取点之间的路径,并检测抓取点的碰撞情况,路径点个数为界面设置的数量,不设置回撤抓取点检测数量。 |
抓取路径碰撞检测 |
仅规划起始规划点到预抓取点的路径,检测抓取点的碰撞情况,并将被抓取物体添加到工具,检测所有路径点的碰撞情况(目的:相当于把抓取路径当做回撤路径,对回撤路径带着抓取物进行碰撞检测),需要设置回撤抓取点检测数量,路径点个数为界面设置的数量。 |
规划回撤路径 |
规划起始规划点到预抓取点的路径,检测抓取点的碰撞情况,并将被抓取物体添加到工具,然后规划预抓取点到起始规划点的路径,路径点个数为界面设置的数量的 2 倍。 |
路径点数量
路径点是轨迹的基本组成部分,每个路径点包含位置、方向等信息。路径点的数量会影响轨迹的精细度和准确性。路径点数量越多,轨迹越精细,但规划时间也会相应增加。对于起始规划点到抓取点之间距离较长的情况,建议增加路径点数量;相反,如果距离较短,可以减少路径点数量。
|
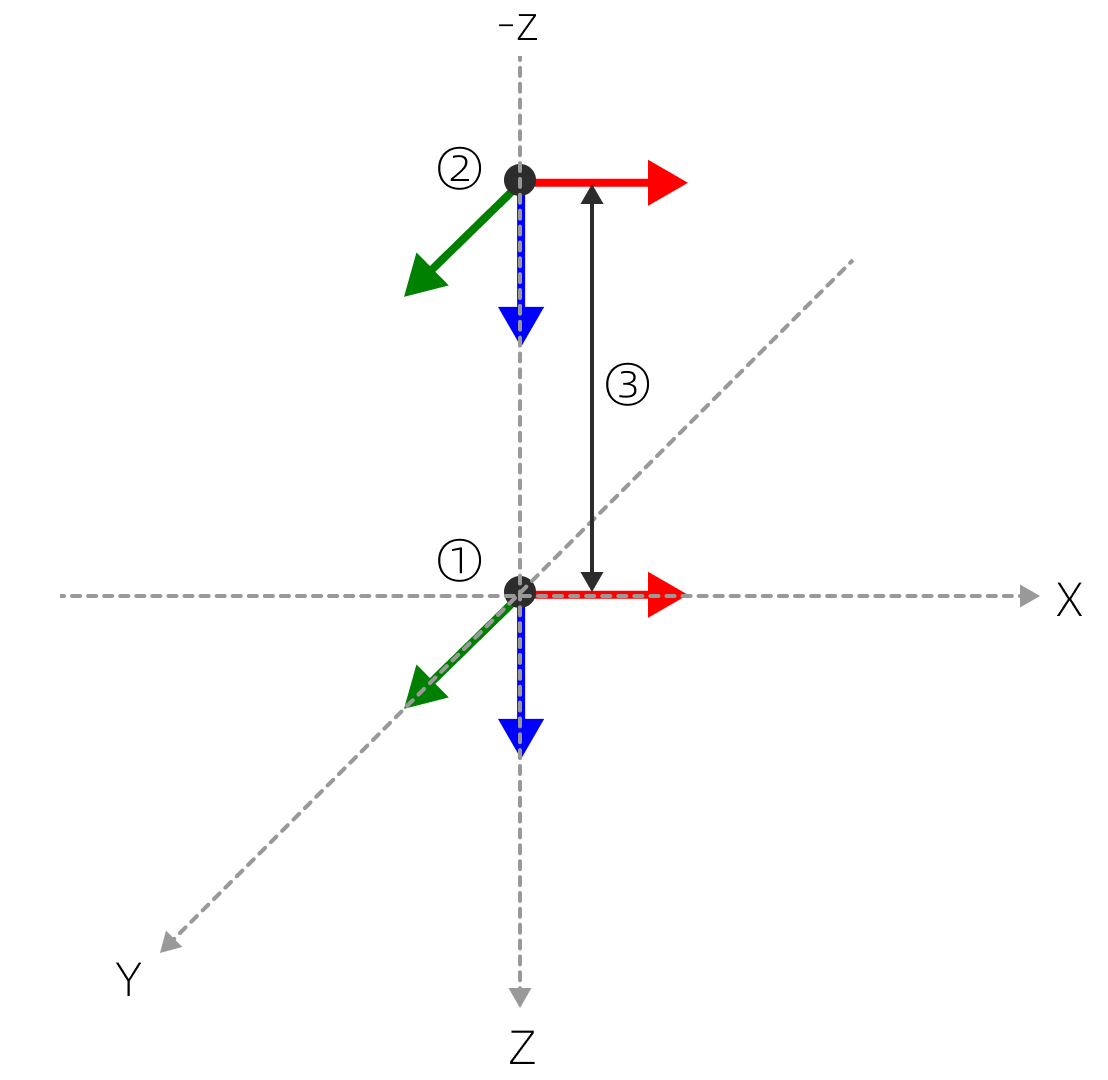
起始规划点
在抓取点的基础上增加一个路径点,以便规划出一段抓取点附近的无碰撞路径。