Toolkit Interface
In the main interface, click Toolkit to enter the toolkit interface. In this interface, you can open "Point Cloud Generator", "3D Rotation Transformation Tool", and "TCP Inverse Calculator".
Point Cloud Generator Interface
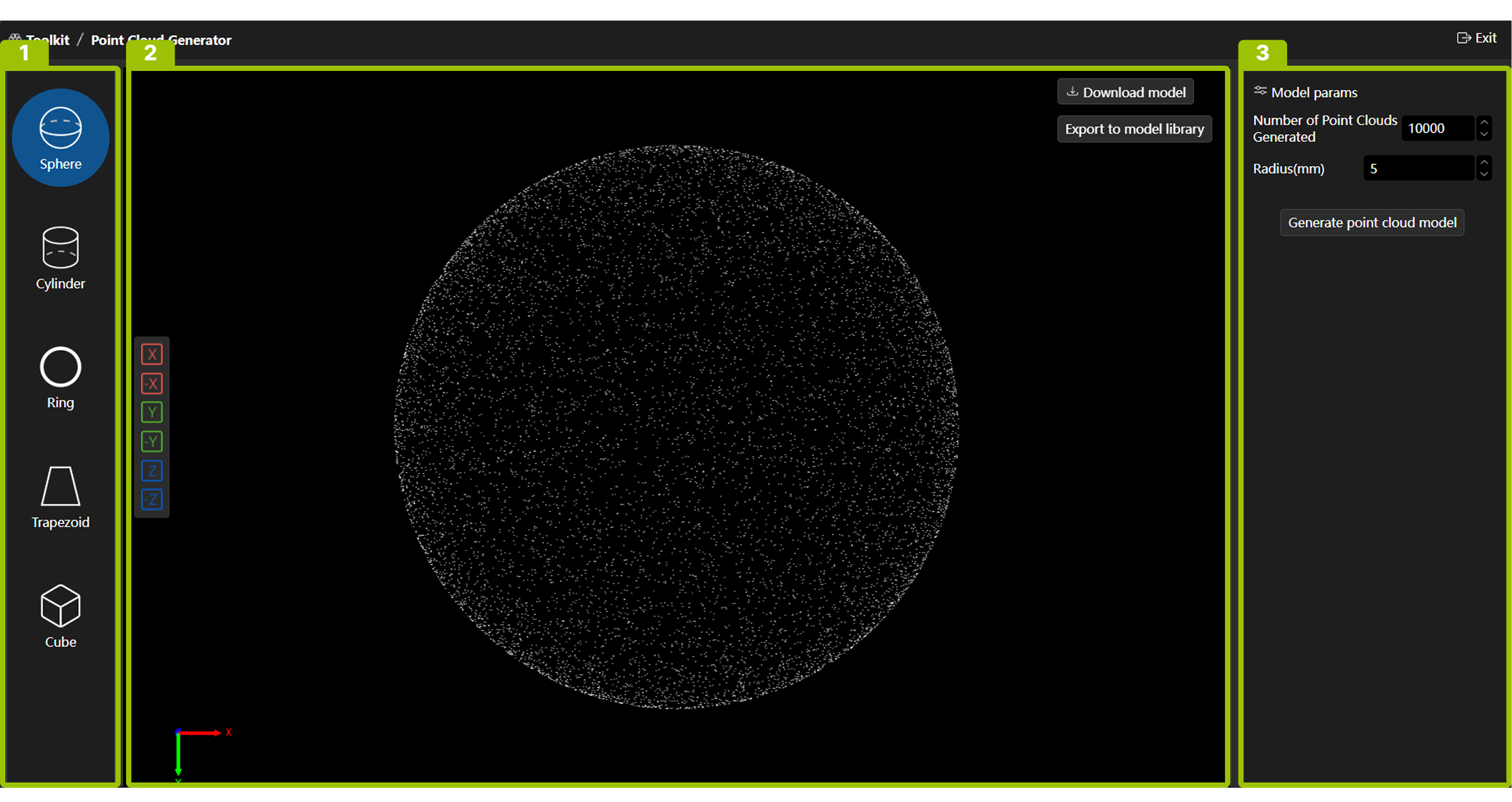
The Point Cloud Generator is used to create regular geometric shapes (such as rings, spheres, cylinders, trapezoids, cubes) point cloud models. These models can be used to create point cloud matching templates for workpieces.
In the toolkit interface, click Point Cloud Generator to enter the Point Cloud Generator interface, which consists of the following three parts:
No. |
Area |
Description |
|---|---|---|
1 |
Model Type Selection Area |
Select the geometric shape type in this area. Available types include: sphere, cylinder, ring, trapezoid, cube. For ring generation, generating circles with inner diameter of 0 is supported; for cube generation, generating rectangular planes with height of 0 is supported. |
2 |
Model Display Area |
View the generated point cloud model, download and export models in this area. |
3 |
Model Parameter Settings Area |
Set various parameters of the geometric shape in this area. |
3D Rotation Transformation Tool Interface
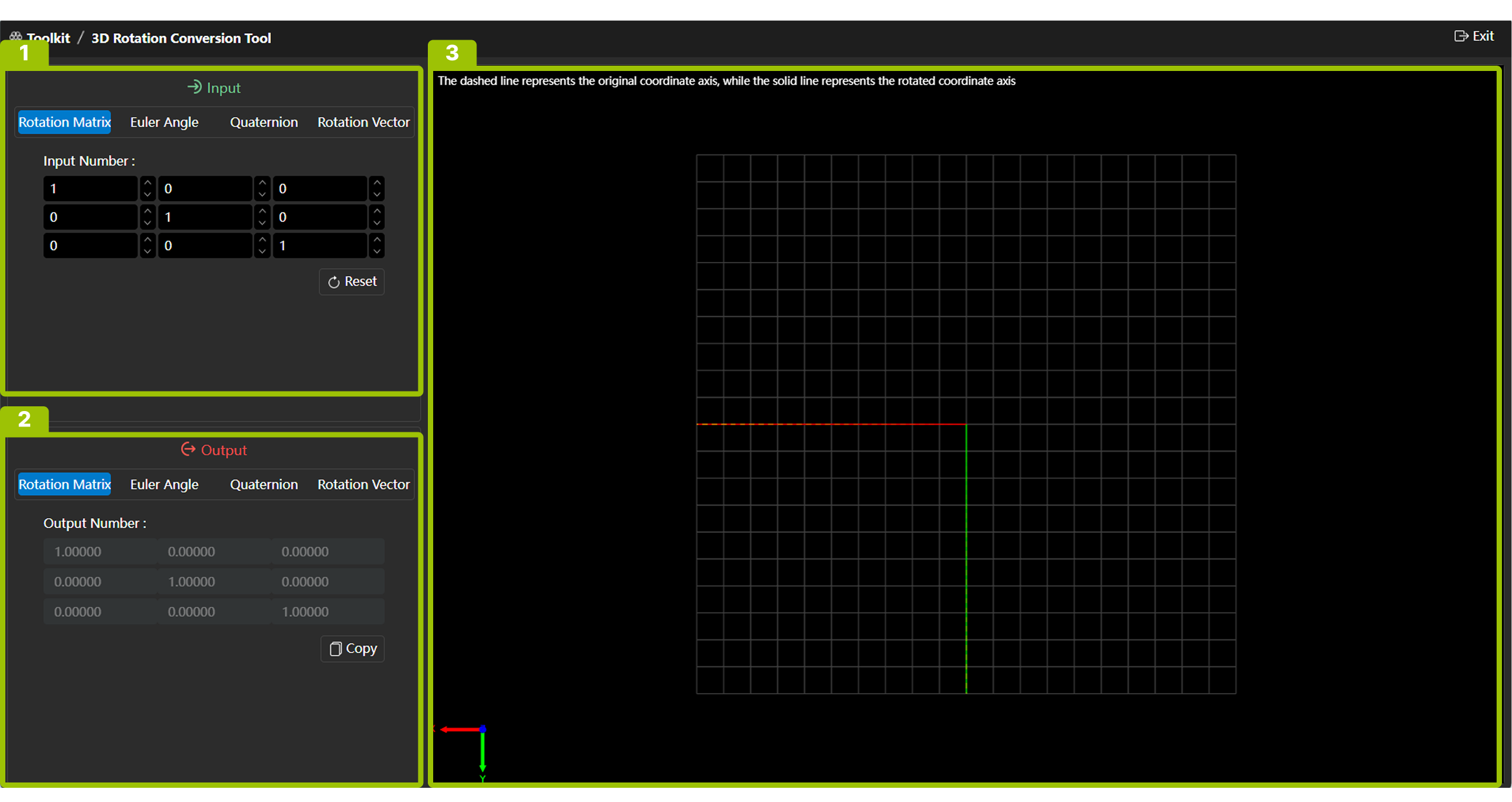
The 3D Rotation Transformation Tool is used to view pose rotations in 3D space and convert between different pose rotation representations.
In the toolkit interface, click 3D Rotation Transformation Tool to enter the 3D Rotation Transformation Tool interface, which consists of the following three parts:
No. |
Area Name |
Description |
|---|---|---|
1 |
Pose Input Area |
Input poses in this area. |
2 |
Pose Output Area |
View transformed poses in this area. |
3 |
3D Space Pose View Area |
View pose rotation changes in this area. |
TCP Inverse Calculator
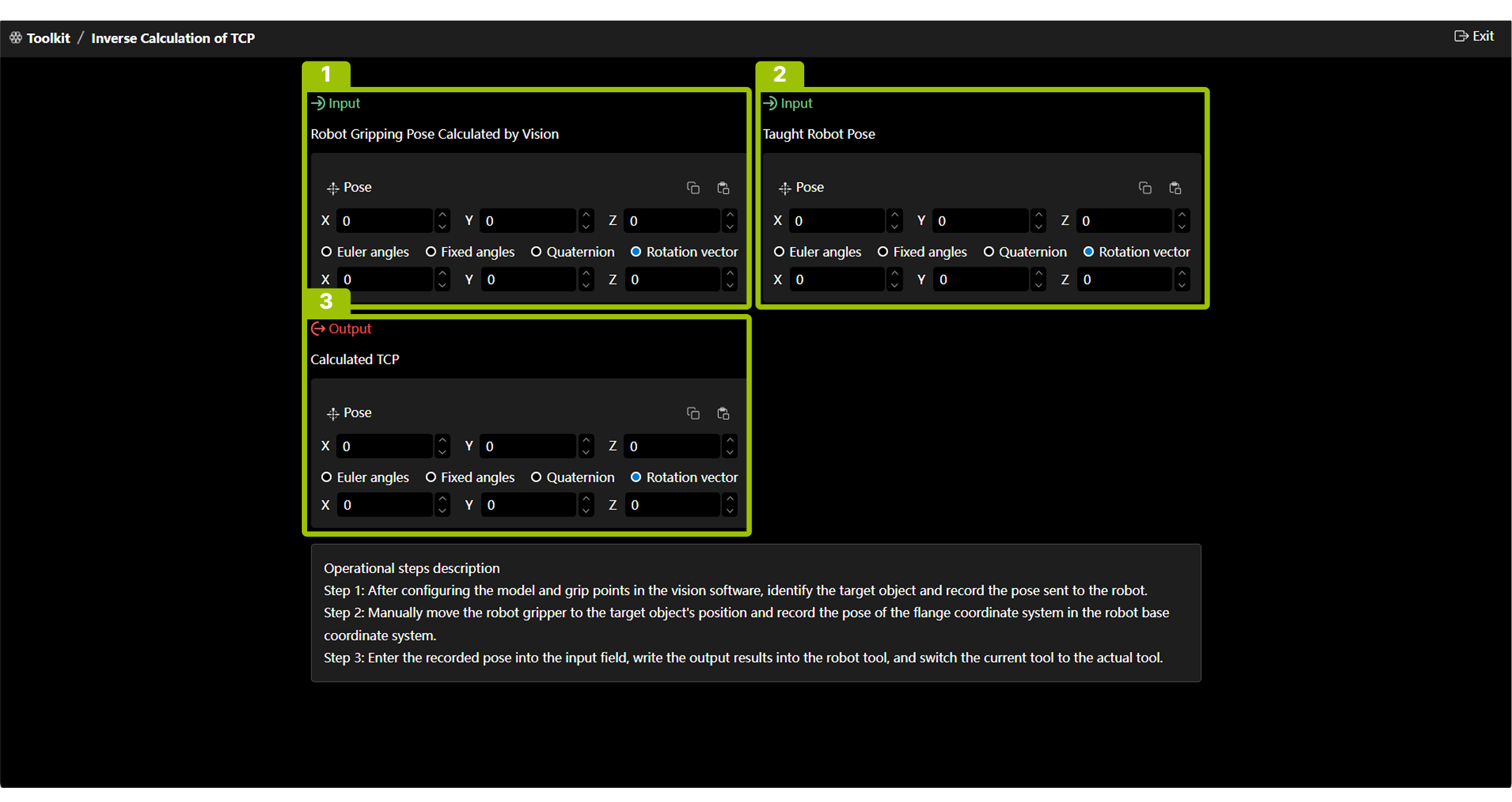
The TCP Inverse Calculator calculates the current robot’s tool coordinate system values based on the pick point pose calculated by vision and the taught robot pose.
In the toolkit interface, click TCP Inverse Calculator to enter the TCP Inverse Calculator interface, which consists of the following three parts:
No. |
Description |
|---|---|
1 |
Input the pick point pose calculated by vision |
2 |
Input the taught robot pose |
3 |
View the calculated TCP |