3D Rotation Transformation Tool
Introduction
The 3D Rotation Transformation Tool is used to view and convert pose rotation representation methods in three-dimensional space. This tool supports multiple representation methods, including rotation matrix, Euler angle, quaternion, and rotation vector.
In the software main interface, click in sequence to enter this tool.
User Interface
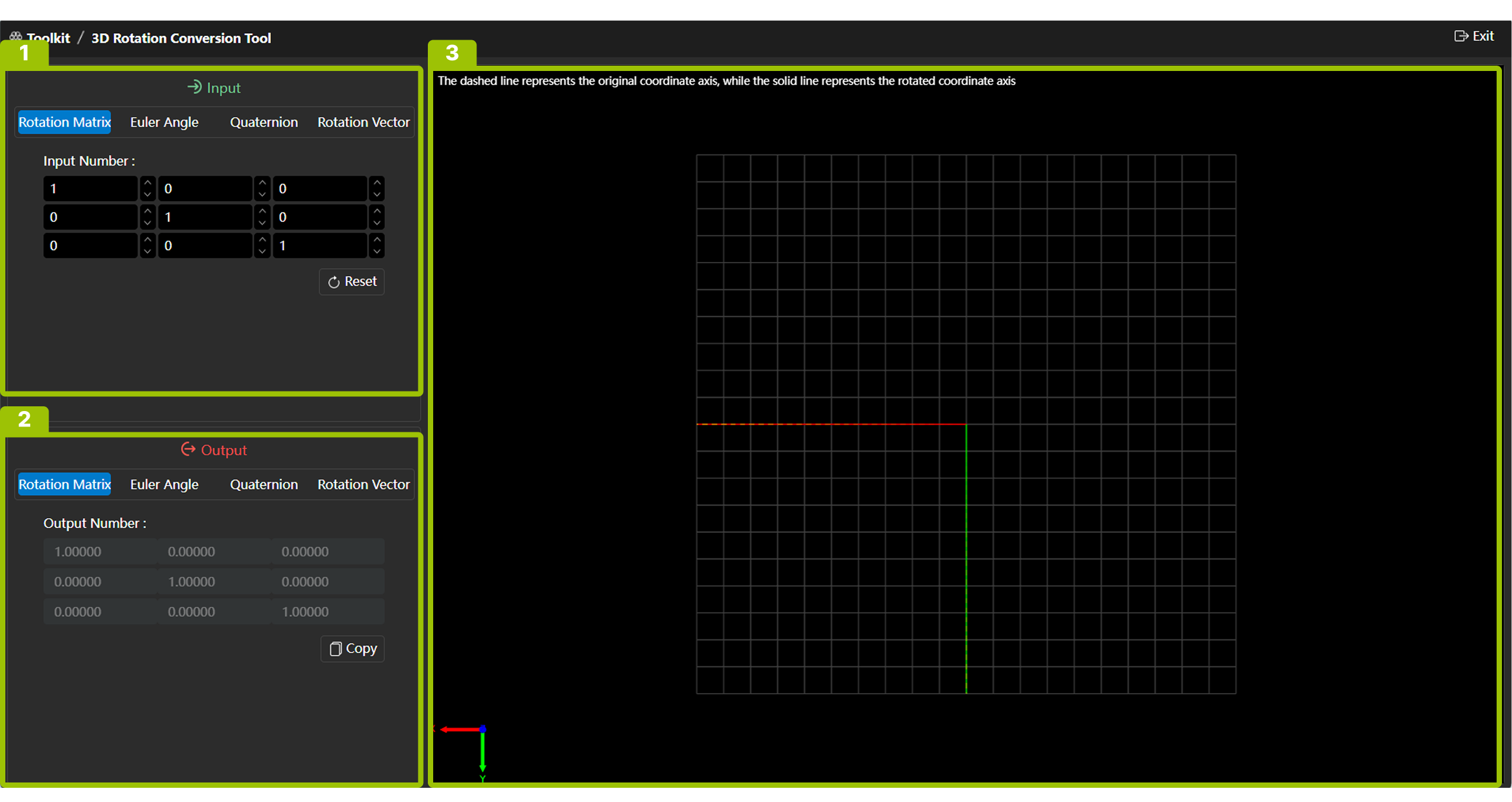
This tool interface consists of the following three parts:
No. |
Area Name |
Description |
|---|---|---|
1 |
Pose Input Area |
Select representation method and input pose values in this area. |
2 |
Pose Output Area |
Select target representation method and view converted pose values in this area. |
3 |
3D Space Pose Viewing Area |
View the current input pose’s 3D rotation state in this area. |
Usage Tutorial
-
In the pose input area, select the input representation method (such as rotation matrix, Euler angle, quaternion, or rotation vector).
-
Input the corresponding pose values. At this time, the 3D space pose viewing area will display the rotation state of the input values in real time.
-
In the pose output area, select the target representation method.
-
View the converted pose values and click Copy to copy the data to the clipboard.