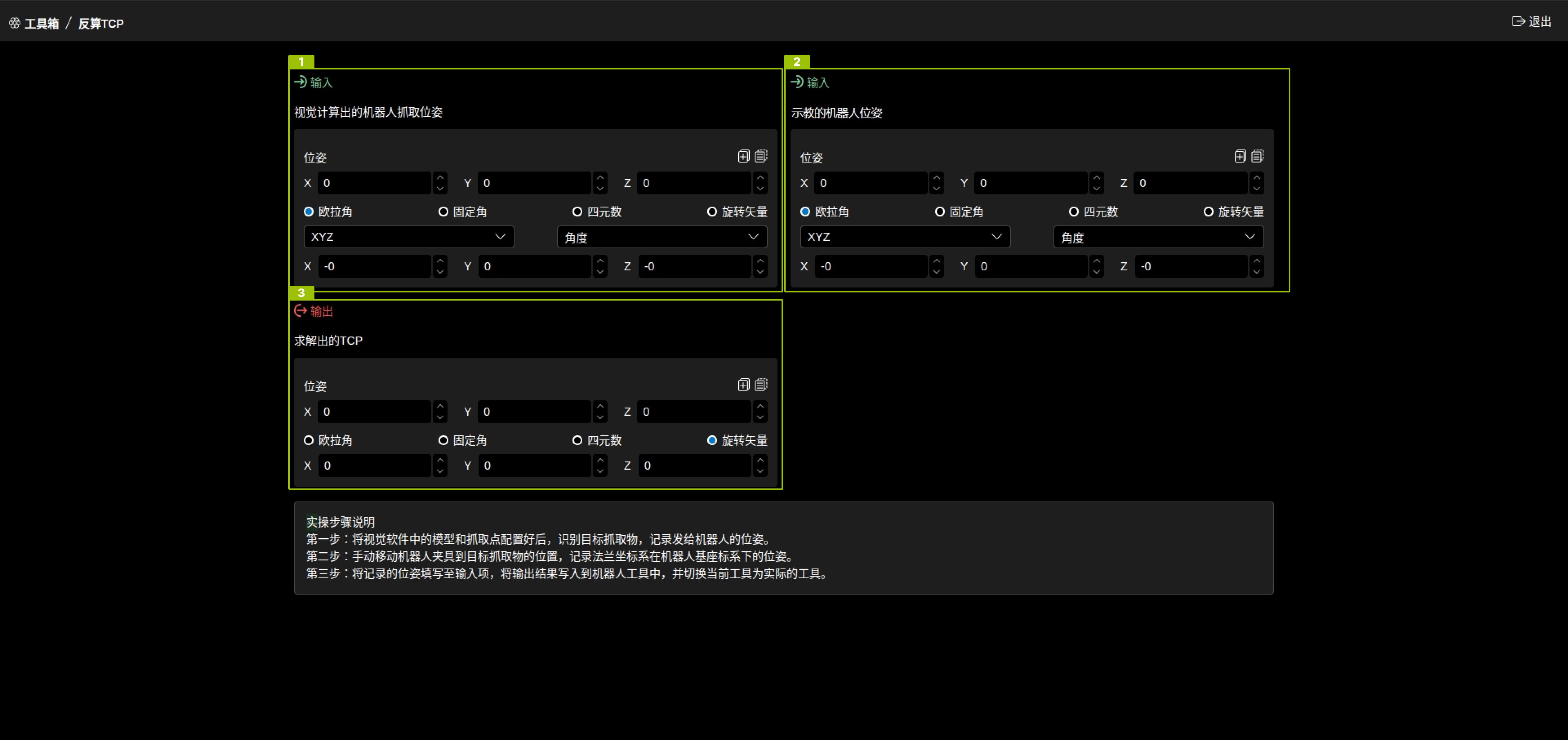
TCP反算工具 简介 TCP反算工具是基于视觉计算的抓取点位姿和示教的机器人位姿计算出当前机器人的工具坐标系数值。 在软件主界面依次单击 工具箱 TCP反算工具 进入该工具。 用户界面 该工具由以下3部分组成: 序号 说明 1 输入视觉计算的抓取点位姿 2 输入示教的机器人位姿 3 查看求解出的TCP 使用教程 该工具的使用流程为:输入视觉计算的抓取点位姿 > 输入示教的机器人位姿 > 查看求解出的TCP 将视觉软件中的模型和抓取点配置好后,识别目标抓取物,记录发给机器人的位姿。 手动移动机器人夹具到目标抓取物的位置,记录法兰坐标系在机器人基座标系下的位姿。 将记录的位姿填写至输入项,将输出结果写入到机器人工具中,并切换当前工具为实际的工具。 常见问题 如何查看求解出的TCP 输入视觉计算的抓取点位姿,输入示教的机器人位姿后将自动计算求解出的TCP,无需进行其他操作。 3D旋转变换计算工具 接口通信指令说明