眼在手外 - 六轴机器人
准备工作
-
硬件连接:
-
完成相机、工控机、机器人硬件系统的连接。
-
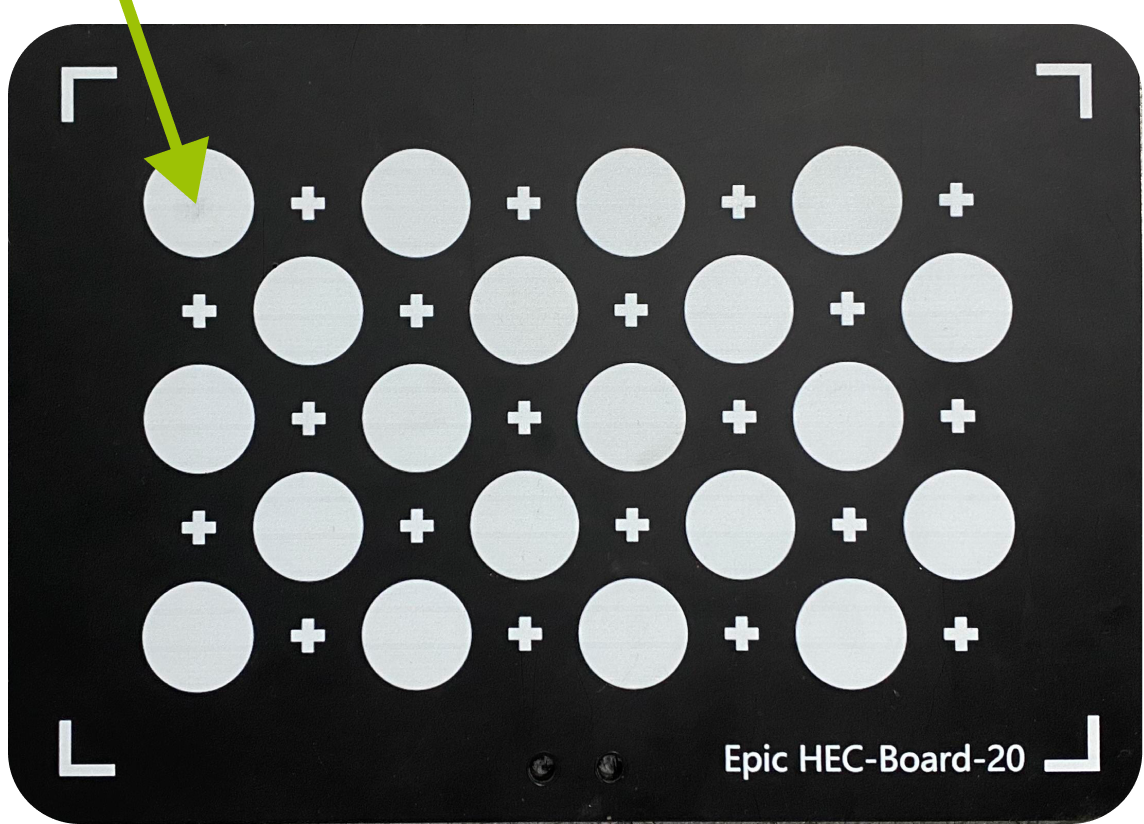
将标定板安装在机器人末端。
-
-
在Epic Eye中启动内参检查工具检查相机内参精度。
-
Epic Pro配置:
打开项目方案并进入工作空间,完成以下配置:
-
添加自定义机器人并开启通信配置(若未开启通信配置,在标定过程中需要手动输入机器人位姿数据)。
-
添加相机组,连接相机并调整相机参数,确保2D视图中的标定板清晰且曝光适中,同时确保点云视图中的标定板点云平整。
-
标定流程
检查机器人绝对定位精度
-
进入标定流程
在相机组中,单击标定,在弹出的窗口中选择眼在手外的相机安装方式,然后单击确定,进入标定流程。
-
检查机器人绝对定位精度
-
单击机器人绝对定位精度检查。
-
将检查类型设置为“X方向”。
-
单击起点数据;确保标定板位于相机视野中;单击获取位姿。
-
单击终点数据;使用示教器移动机器人,确保仅沿X方向移动一段距离,其余方向不进行移动;单击获取位姿。
-
将检查类型分别设置为Y方向、Z方向,并重复步骤c-d 。
-
单击计算精度。
-
若精度不满足要求,需要重新进行检查。
-
若精度满足要求,单击返回,执行手眼标定流程。
-
-
标定流程
-
确认机器人连接状态
Epic Pro持续检测与机器人的连接状态。
-
若机器人监控端口状态显示已连接,则软件可以自动获取机器人位姿数据。
-
若显示未连接,则需要查看机器人示教器中显示的机器人位姿,手动填写到点对数据中。
-
-
获取点对数据
将标定板移动到相机视野范围中央,单击位于点对列表中的采集点对数据,此时获得当前状态下的一组标定板位姿和机器人位姿,以及测量准度。
测量准度数值在 0.997~1.003 范围内时显示为绿色,表示当前数据可用;在 0.993~0.997 或 1.003~1.007 范围内时显示为黄色,表示当前数据存在风险;小于0.993或者大于1.007时显示为红色,表示数据不可用,建议删除当前数据并重新采集。 -
调整标定板位姿
采集第一组点对数据后,使用示教器移动机器人,在保证标定板在相机视野范围内的前提下,调整标定板的位姿,使得机器人移动时每个关节都能有所变化。

-
重复获取点对数据
调整标定板位姿后,单击添加,此时获得第二组点对数据。重复步骤3-4,至少采集10组点对数据。
-
计算点对数据
单击计算手眼标定结果,即可对以上采集的全部点对数据进行计算,获得手眼标定结果。
建议在采集四组点对数据后,即可每增加一组数据就进行一次计算。 -
查看手眼标定结果
单击查看标定结果,打开计算结果窗口,在该窗口中查看手眼标定结果。