그랩 경로 시작점이란?
경로 계획의 시작 위치로, 로봇이나 그리퍼가 움직이기 시작하는 출발점 상태를 나타내며, 위치와 자세 정보를 포함하여 안전하고 충돌 없는 경로를 계획할 수 있습니다.
그랩 경로 시작점 추가
-
그랩 경로 시작점 포즈는 자체 매개변수를 통해 직접 설정할 수 없으며, 로봇 포즈를 설정하여 구현해야 하므로 그랩 경로 시작점을 추가할 때 먼저 로봇 포즈를 설정할 수 있습니다:
-
매개변수 설정 패널을 열고, 로봇 매개변수에서 로봇 도구 컨트롤러를 열고 도구를 선택합니다.
-
키보드 Shift 를 누른 상태에서 마우스 왼쪽 버튼으로 컨트롤러를 드래그하여 목표 위치로 이동시키고, 경로 계획 패널에서 경로 포인트 오른쪽의
 아이콘을 클릭하여 시작점 포즈를 업데이트합니다.
아이콘을 클릭하여 시작점 포즈를 업데이트합니다.
-
-
그랩 경로 시작점 추가:
-
그랩 경로 시작점 항목 오른쪽의 + 를 클릭합니다.
-
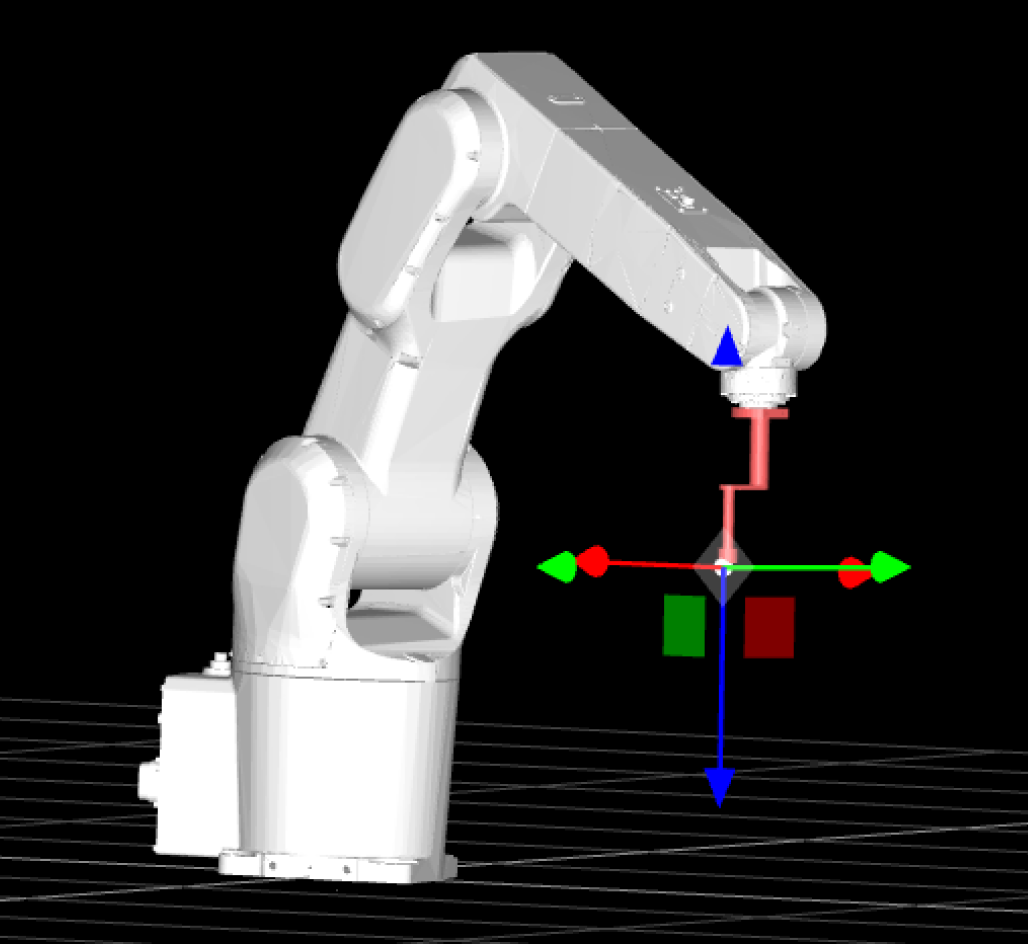
팝업 창에서 그랩 경로 시작점의 이름을 입력하고 확인 을 클릭하면, 그랩 경로 시작점이 TCP에서 생성됩니다.
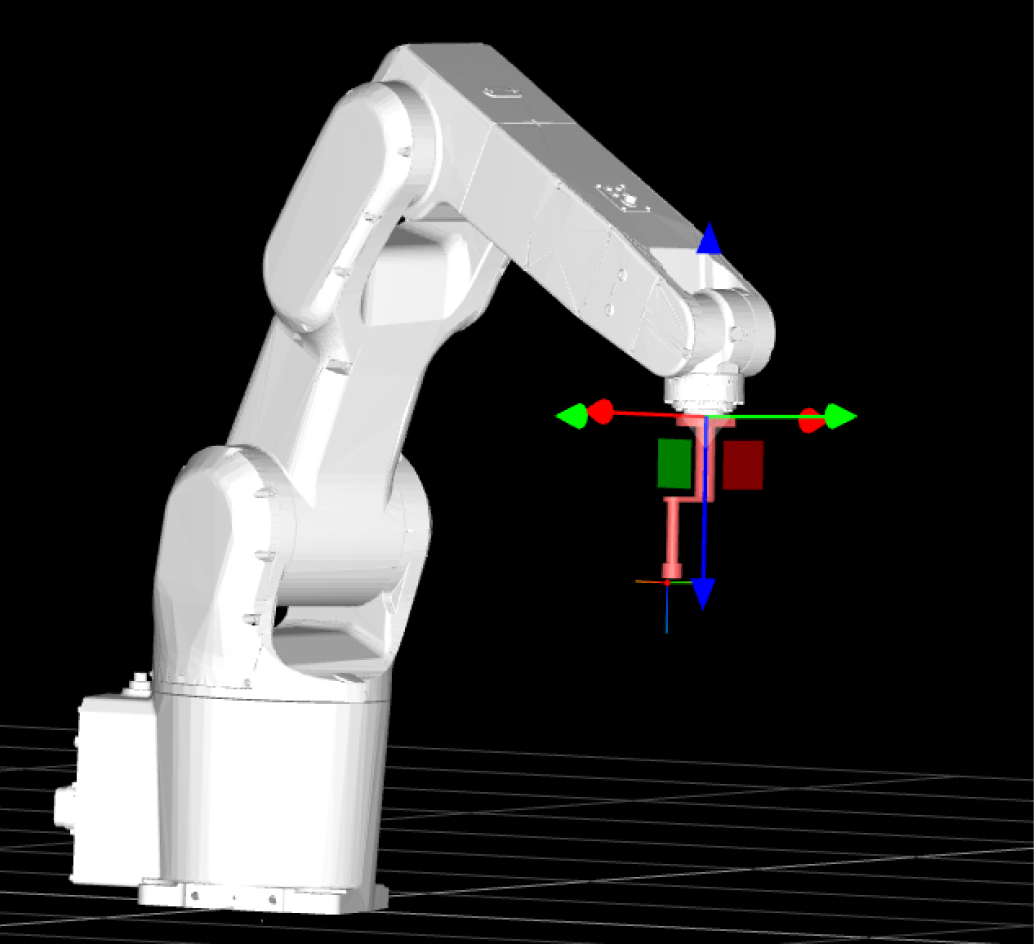
시작점 생성 전
시작점 생성 후
추가 사항:
여러 개의 시작점을 설정하려면 로봇 포즈를 다시 설정한 후 시작점을 추가하세요. 새로운 시작점이 TCP에서 생성됩니다. 로봇 포즈를 수정하지 않으면 새로운 시작점이 기존 시작점과 겹칩니다.
-
-
그랩 경로 시작점 모델 매개변수 설정(선택사항).
-
그랩 경로 시작점 이름 오른쪽의
 아이콘을 클릭합니다.
아이콘을 클릭합니다. -
세부 정보 팝업 창에서 그랩 경로 시작점의 이름 변경, 색상 수정, 크기 설정, 불투명도 및 좌표축 길이 등을 조작하고 시작점의 포즈 정보를 확인할 수 있습니다.
추가 사항:
-
시작점 포즈를 조정하려면 로봇 포즈를 다시 설정한 후
아이콘을 클릭하여 시작점 포즈를 로봇 TCP로 업데이트해야 합니다. -
시작점 포즈를 조정하지 않으려면
 아이콘을 클릭하여 로봇 모델을 해당 시작점으로 이동시킬 수 있습니다.
아이콘을 클릭하여 로봇 모델을 해당 시작점으로 이동시킬 수 있습니다. -
해당 시작점을 삭제하려면 시작점 이름 오른쪽의
 아이콘을 클릭합니다.
아이콘을 클릭합니다.
-
-
프리그랩 포인트란
프리그랩 포인트는 기계팔이 최종 그랩 목표 위치에 도달하기 전의 중간 자세 위치로, 일반적으로 료박스 상단이나 사용자가 정의한 안전한 위치에 설정되며, 로봇이 안전하고 효율적인 경로를 따라 목표 물체에 접근하여 주변 환경과의 충돌을 방지할 수 있도록 하는 것이 목적입니다.
프리그랩 포인트 추가
-
프리그랩 포인트 항목 오른쪽의 + 를 클릭합니다.
-
팝업 창에서 그랩 경로 시작점의 이름을 입력하고, 오프셋 방향, 오프셋 거리, 충돌 감지 단계 길이를 조정한 후 확인 을 클릭합니다.
-
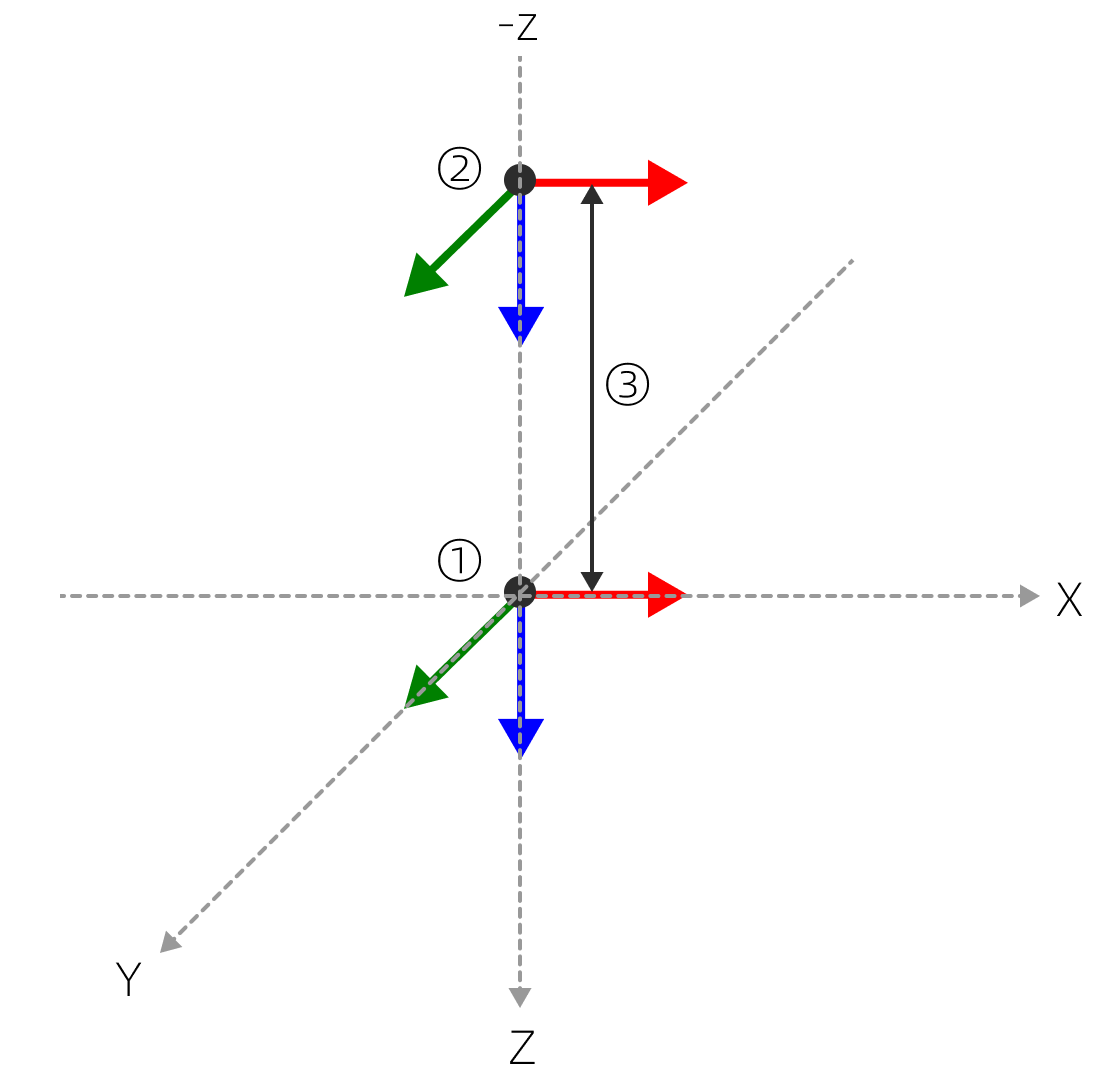
오프셋 거리: 아래 그림에서 ①은 그랩 포인트, ②는 프리그랩 포인트, ③은 오프셋 거리입니다.
-
오프셋 방향:
방식
축 방향
그랩 포인트 따라
X+、X-、Y+、Y-、Z+、Z-
로봇 좌표계 따라
X+、X-、Y+、Y-、Z+、Z-
사용자 정의 방향
X、Y、Z
-
사용자 정의 방향: X/Y/Z 성분 설정 설명
매개변수 값
설명
0
이 방향으로 오프셋하지 않음.
1
양의 방향으로 오프셋.
-1
음의 방향으로 오프셋.
위 그림에 표시된 프리그랩 포인트(②)는 X, Y를 0으로 설정하고 Z를 -1로 설정한 것입니다.
추가 사항:
-
프리그랩 포인트 매개변수를 설정하려면 프리그랩 포인트 이름 오른쪽의
아이콘을 클릭합니다. -
해당 프리그랩 포인트를 삭제하려면 프리그랩 포인트 이름 오른쪽의
아이콘을 클릭합니다.
-