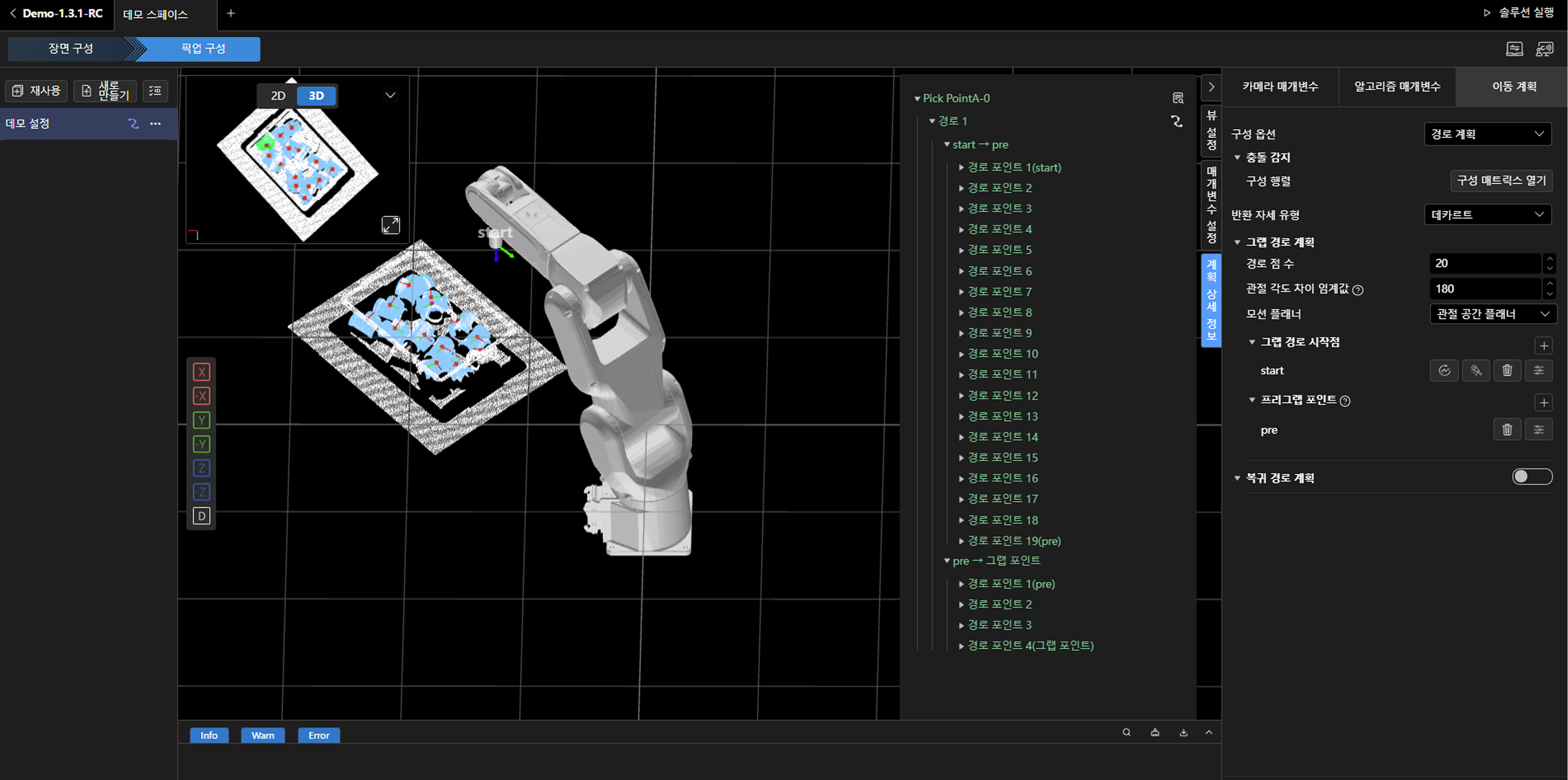
경로 계획 구성 설명 소개 경로 계획은 로봇 모션의 그리핑 경로와 후퇴 경로를 계획하고 충돌 감지를 수행하는 것입니다. 충돌 감지 구성 경로 계획 구성 프로세스는 다음과 같습니다: 실제 상황에 맞게 충돌 감지와 경로 계획 관련 매개변수 구성을 완료합니다. 설정 완료 후 순차적으로 촬영 > 검출 > 계획을 클릭합니다. 계획이 성공하면 경로 애니메이션이 표시됩니다. 계획이 실패하면 계획 실패 알림이 표시되며, 계획 세부 정보로 이동하여 확인하십시오. 현재 단일 프레임 이미지를 디버깅해야 하는 경우, 매개변수 조정 후 개별적으로 계획을 수행하고 효과를 확인할 수 있습니다. 뷰 설정 뷰 설정의 내용을 수정하여 경로 계획 효과를 보조적으로 확인할 수 있습니다. 뷰 설정을 클릭한 후 포인트 클라우드 텍스처와 원본 포인트 클라우드 스위치를 활성화할 수 있으며, 경로 포인트 크기, 색상, 관절 각도 새로 고침 임계값, 경로 포인트 실행 시간 및 경로 순환 표시 횟수를 수정할 수 있습니다. 매개변수 상세 설명 관절 각도 새로 고침 임계값: 로봇의 관절 각도가 소프트웨어에 동기화되며, 소프트웨어가 지속적으로 로봇을 렌더링하는 것을 방지하기 위해 로봇의 관절 각도 차이가 임계값보다 클 때만 인터페이스 로봇의 새로 고침이 트리거됩니다. 경로 포인트 실행 시간: 로봇 시뮬레이션의 전체 계획 경로 총 시간을 조정하는 데 사용되며, 시간 값이 클수록 모션 속도가 느려집니다. 경로 순환 표시 횟수: 로봇 시뮬레이션 계획 경로의 순환 횟수를 조정하는 데 사용됩니다. 계획 세부 정보 확인 오른쪽 매개변수 패널의 계획 세부 정보를 클릭하여 경로 계획 상황을 확인합니다. 아이콘을 클릭하면 그리핑 포인트의 이름, ID, 우선순위, 해당 그리핑 물체 ID 및 그리핑 포인트 포즈 정보를 확인할 수 있습니다. 아이콘을 클릭하면 감지된 경로 상황을 뷰에서 하이라이트로 표시할 수 있습니다. 아이콘을 클릭하면 로봇을 해당 경로 포인트로 이동시킬 수 있습니다. 충돌 감지 설정 가이드 경로 계획 매개변수 가이드
 아이콘을 클릭하면 그리핑 포인트의 이름, ID, 우선순위, 해당 그리핑 물체 ID 및 그리핑 포인트 포즈 정보를 확인할 수 있습니다.
아이콘을 클릭하면 그리핑 포인트의 이름, ID, 우선순위, 해당 그리핑 물체 ID 및 그리핑 포인트 포즈 정보를 확인할 수 있습니다. 아이콘을 클릭하면 감지된 경로 상황을 뷰에서 하이라이트로 표시할 수 있습니다.
아이콘을 클릭하면 감지된 경로 상황을 뷰에서 하이라이트로 표시할 수 있습니다. 아이콘을 클릭하면 로봇을 해당 경로 포인트로 이동시킬 수 있습니다.
아이콘을 클릭하면 로봇을 해당 경로 포인트로 이동시킬 수 있습니다.