기준 좌표계
기본 좌표계 상세 설명
베이스 좌표계
베이스 좌표계는 산업용 로봇의 기본 좌표계로, 공간에서 로봇의 절대 위치를 나타냅니다. 산업용 로봇이 지면에 설치된 경우, 이 좌표계는 대부분 베이스 위에 위치하며, 원점은 로봇 베이스 중심에 있습니다. XY평면은 베이스 평면과 일치하며, 일반적으로 X축 방향은 로봇 "후면" 방향을 가리키고, Z축 방향은 수직으로 위를 향합니다. 로봇이 거꾸로 설치된 경우, Z축은 아래를 가리킵니다.
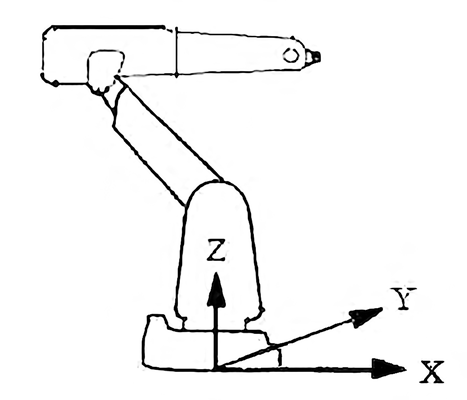
좌표 정의:
-
원점:로봇 베이스 중심에 위치
-
XY평면:베이스 평면과 일치
-
X축 방향:일반적으로 로봇 "후면" 방향을 가리킴
-
Z축 방향:수직 위쪽(정상 설치) 또는 아래쪽(거꾸로 설치)
베이스 좌표계는 로봇 작업 공간의 절대 기준계로서, 모든 위치와 자세는 베이스 좌표계를 기준으로 정의됩니다. 간단한 응용 프로그램에서는 사용자가 베이스 좌표계에서 직접 로봇 동작을 프로그래밍할 수 있습니다.
월드 좌표계
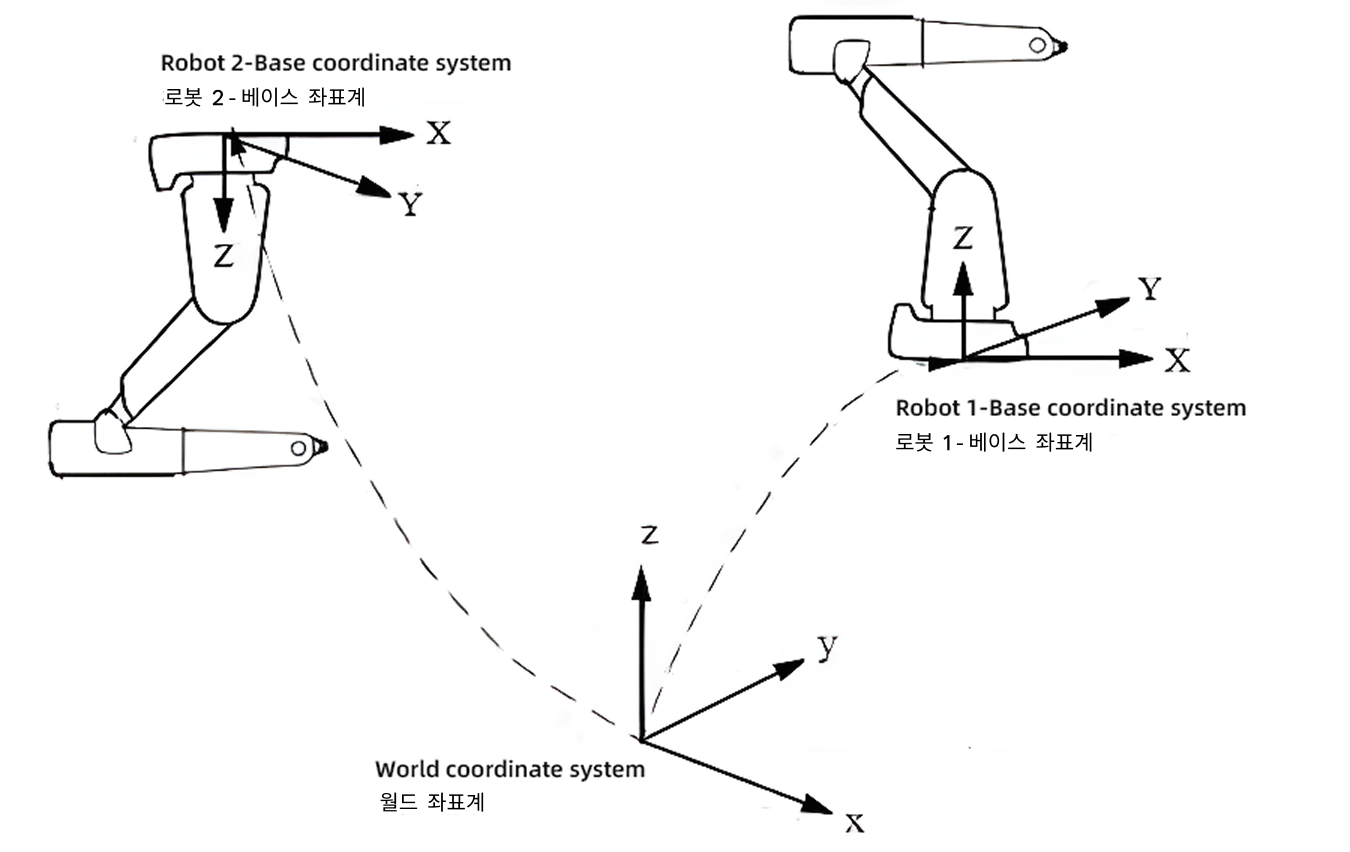
일반적으로 월드 좌표계와 베이스 좌표계는 일치합니다. 로봇이 지면에 설치된 경우, 베이스 좌표계를 기반으로 프로그래밍하는 것이 매우 간단합니다. 그러나 특정 특수 상황에서는 월드 좌표계를 사용하는 것이 더 큰 편의를 가져다줄 수 있습니다.
적용 시나리오:
-
비표준 설치:로봇이 거꾸로 또는 기울어져 설치된 경우, 베이스 좌표계로 프로그래밍하기가 어려운데, 축의 방향이 작업 공간의 주요 방향과 다르기 때문입니다. 이때 월드 좌표계를 정의하면 프로그래밍 작업을 간소화할 수 있습니다.
-
다중 로봇 협업:공장 내에 여러 로봇이 같은 작업 공간에서 작업할 때, 통일된 월드 좌표계를 사용하면 로봇 간 상호 통신과 협조가 가능하여 충돌과 간섭을 방지할 수 있습니다.
말단 실행기 관련 좌표계
플랜지 좌표계
플랜지 좌표계는 로봇 출고 시 이미 고정된 좌표계로, 변경할 수 없습니다. 원점은 6축 로봇 플랜지의 중심에 위치하며, XY평면은 플랜지 평면과 일치하고, Z축 방향은 플랜지에 수직으로 외부로 연장됩니다.
플랜지 좌표계는 로봇 말단 실행기의 기준 기준계로서, 모든 툴 좌표계는 플랜지 좌표계를 기반으로 정의됩니다. 이 좌표계는 플랜지에 설치된 다양한 도구에 통일된 기준 표준을 제공합니다.
좌표 정의:
-
원점:6축 로봇 플랜지의 중심에 위치
-
XY평면:플랜지 평면과 일치
-
Z축 방향:플랜지에 수직으로 외부로 연장
툴 좌표계와 TCP
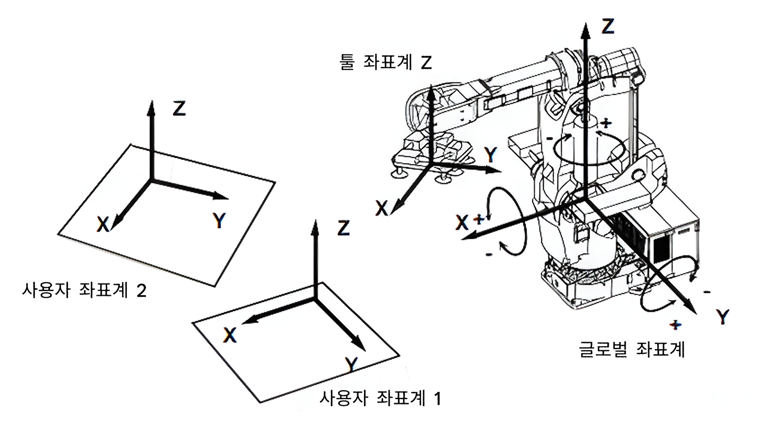
툴 좌표계는 툴 센터 포인트 TCP를 원점으로 구축된 좌표계로, 로봇 말단 도구의 플랜지 좌표계에 대한 위치 관계를 설명합니다. 툴 센터 포인트는 툴 좌표계의 원점으로, 산업용 로봇의 핵심 기술 중 하나입니다.
툴 좌표계의 매개변수는 로봇 티칭을 통해 얻을 수도 있고, 도구 치수를 정확히 측정하여 얻을 수도 있습니다. TCP의 설정은 프로그래밍과 프로그램 조정을 편리하게 합니다: 로봇이 움직일 때, 일반적으로 말하는 로봇의 위치, 경로, 정밀도, 속도는 실제로 TCP의 위치, 경로, 정밀도, 속도입니다.
툴 좌표계는 로봇이 플랜지 중심이 아닌 도구 끝점의 위치를 정확히 제어할 수 있게 하며, 이는 용접, 조립, 그리핑 등 정밀 작업에 매우 중요합니다.
비전 시스템 좌표계
카메라 좌표계
카메라 좌표계는 로봇 비전 시스템의 기초로, 카메라 광학 중심을 원점으로 구축됩니다. 그 역할은 카메라가 수집한 이미지 정보를 3차원 공간 좌표 정보로 변환하여 로봇 비전 위치 결정과 인식에 기초 데이터를 제공하는 것입니다.
좌표 정의:
-
원점:카메라 렌즈와 센서의 교정 중심 위치
-
Z축 방향:카메라 아래쪽(촬영 방향)
-
X축 방향:카메라 긴 변 방향, 일반적으로 음의 X축 방향
-
Y축 방향:오른손 법칙에 따름
특수 응용 좌표계
재료 상자 좌표계
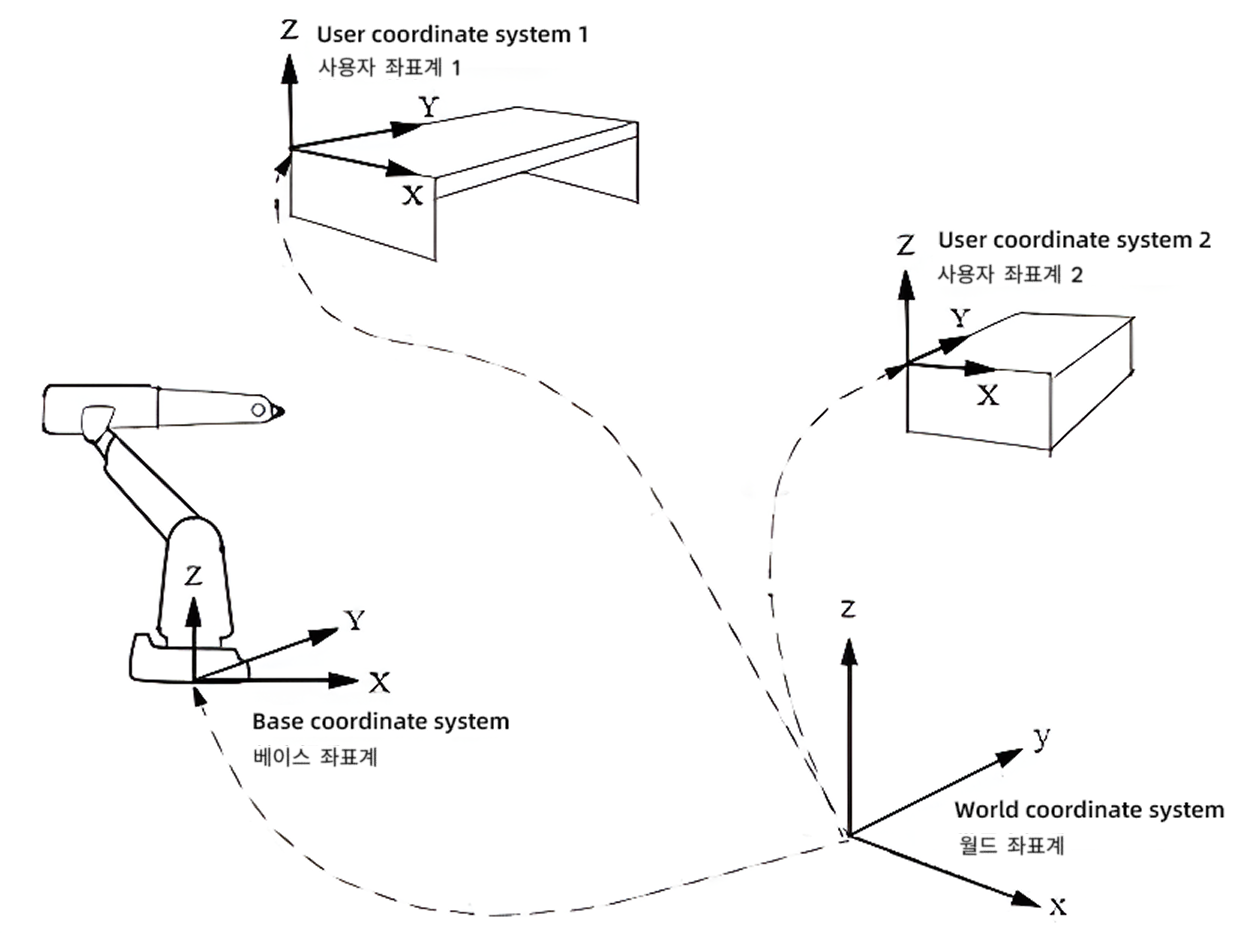
재료 상자 좌표계는 재료 상자나 작업대를 기준으로 구축된 좌표계로, 대량 워크피스 처리를 편리하게 합니다. 원점은 일반적으로 재료 상자의 한 모서리를 선택하고, 좌표축은 재료 상자의 가장자리 방향을 따라 구축되며, 목적은 대량 워크피스의 위치 계산을 간소화하는 것입니다.
자동화 생산에서 재료 상자 좌표계는 재료 상자 내의 여러 워크피스를 순서대로 조작하는 데 편리하며, 규칙적인 좌표 오프셋을 통해 재료 상자 내의 각 워크피스 위치에 순차적으로 접근할 수 있어, 각 워크피스의 위치를 개별적으로 티칭할 필요가 없습니다.
좌표계 변환 관계
로봇 비전 시스템에서 카메라 설치 위치에 따라 두 가지 주요 핸드-아이 교정 방식이 존재하며, 서로 다른 좌표계 변환 관계에 대응됩니다.
아이-투-핸드 교정은 카메라가 로봇 작업 공간 외부에 고정되어 카메라와 로봇 베이스가 고정 관계를 구축하는 것을 의미합니다. 이러한 구성에서 변환 관계는 카메라 좌표계와 로봇 베이스 좌표계 간의 변환이며, 변환 행렬은 카메라의 로봇 베이스에 대한 위치와 자세를 설명합니다.
아이-인-핸드 교정은 카메라가 로봇 말단에 설치되어 로봇과 함께 움직이는 것을 의미합니다. 이러한 구성에서 변환 관계는 카메라 좌표계와 로봇 플랜지 좌표계 간의 변환이며, 변환 행렬은 카메라의 로봇 플랜지에 대한 고정 위치와 자세를 설명합니다.
로봇 운동 제어의 3요소
로봇이 운동 명령을 실행할 때, 세 가지 핵심 요소를 명확히 해야 합니다: 포인트 데이터(목표 위치의 좌표값), 툴 좌표계 TCP(어떤 도구의 좌표계를 사용할지), 기준 좌표계(포인트 데이터가 어떤 좌표계를 기준으로 정의되는지).
서로 다른 브랜드의 로봇은 이러한 요소에 대해 다른 표현 방식을 가집니다. KUKA 로봇은 $BASE를 사용하여 기준 좌표계를 정의하고, $TOOL을 사용하여 툴 좌표계를 정의합니다. ABB 로봇은 wobj(워크오브젝트)를 사용하여 기준 좌표계를 정의하고, tool(툴 오브젝트)을 사용하여 툴 좌표계를 정의합니다.
실제 응용 사례:팰릿화 작업
팰릿화 작업은 산업용 로봇의 전형적인 응용으로, 서로 다른 좌표계 조합을 통해 유연한 프로그래밍 전략을 실현할 수 있습니다.
-
전략 1:워크피스 좌표계 조정
도구와 포인트를 고정하고 워크피스 좌표계를 조정합니다. 이 방식에서 툴 좌표계(tool)는 변경되지 않고, 포인트 데이터(P)는 변경되지 않으며, 팰릿화 층수에 따라 워크피스 좌표계(wobj)를 조정합니다. 이 방법의 장점은 프로그램 구조가 간단하여 하나의 매개변수만 조정하면 다른 층의 팰릿화를 실현할 수 있다는 것입니다.
-
전략 2:포인트 데이터 조정
두 번째 방식은 도구와 워크피스 좌표계를 고정하고 포인트 데이터를 조정하는 것입니다. 툴 좌표계(tool)는 변경되지 않고, 워크피스 좌표계(wobj)는 변경되지 않으며, 팰릿화 요구에 따라 포인트 데이터(P)를 계산하여 조정합니다. 이 방법은 각 층의 포인트를 계산해야 하지만 더 유연한 팰릿화 모드를 실현할 수 있습니다.