잡기 점을 기반으로 경로 점을 추가하여 잡기 점 근처의 비충돌 경로를 계획합니다.
시작 계획 점 추가
| 시작 계획 점의 위치는 직접 설정할 수 없으며, 로봇의 위치를 조정하여 설정해야 합니다. |
-
로봇 항목에서 로봇의 위치를 조정합니다.
-
시작 계획 점 항목 오른쪽의 + 버튼을 클릭합니다.
-
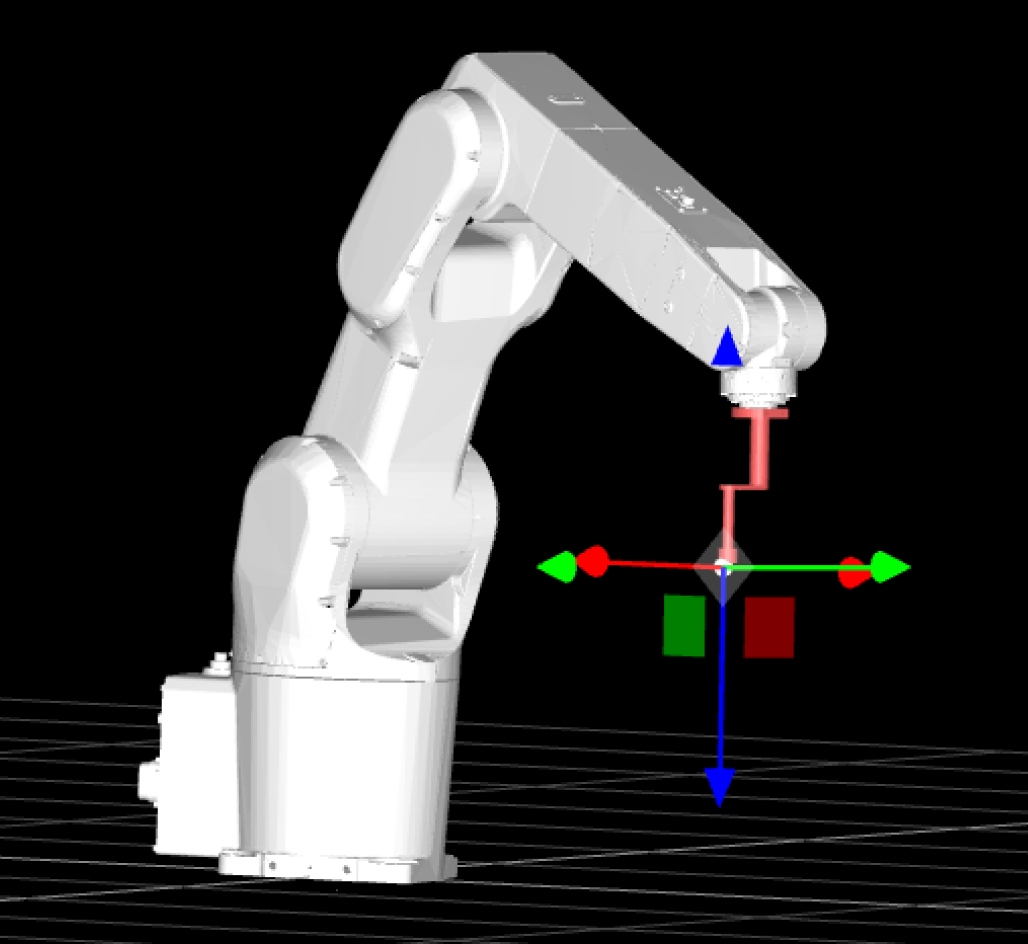
시작 계획 지점은 TCP에서 생성되며, 기본적으로 "시작 계획 지점 1"로 명명됩니다.
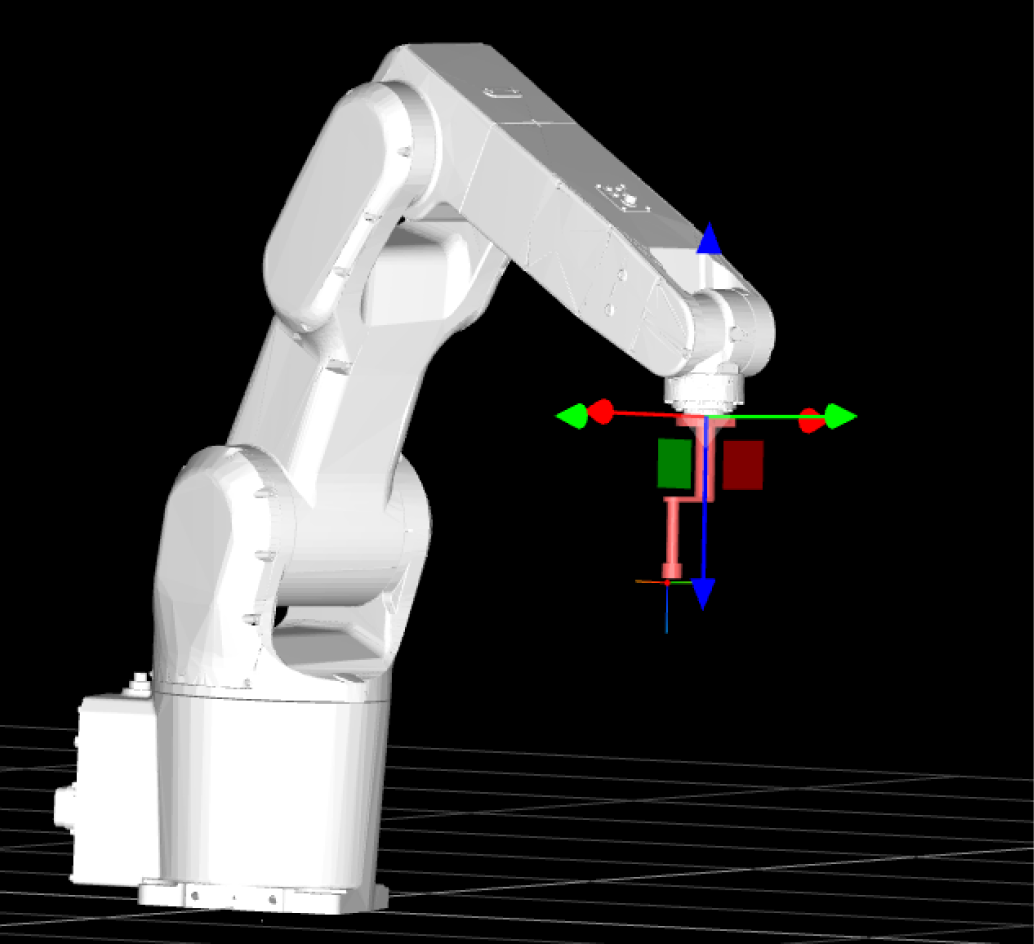
시작 계획 점 생성 전
시작 계획 점 생성 후
-
시작 계획 점 모델 파라미터를 설정합니다 (선택 사항).
-
시작 계획 지점 이름 오른쪽의
 을 클릭합니다.
을 클릭합니다. -
시작 계획 지점 속성 설정 팝업 창에서 시작 계획 지점의 이름을 변경하고, 색상을 편집하며, 크기, 불투명도, 축 길이를 설정할 수 있습니다.
-
추가 사항:
-
계획 점의 위치를 조정해야 하는 경우, 로봇 항목에서 로봇의 위치를 먼저 조정한 후 계획 점 위치 업데이트 버튼을 클릭합니다.
-
로봇 위치가 변경된 경우, 로봇을 해당 점으로 이동 버튼을 클릭하면 로봇 모델이 다시 로봇 계획 점으로 이동합니다.