작업 가이드
뷰 조정
-
뷰 회전: 마우스 왼쪽 버튼을 길게 누른 채 임의 방향으로 드래그합니다.
-
뷰 이동: 마우스 오른쪽 버튼을 길게 누른 채 임의 방향으로 드래그합니다.
-
뷰 확대/축소: 마우스 휠을 스크롤합니다.
-
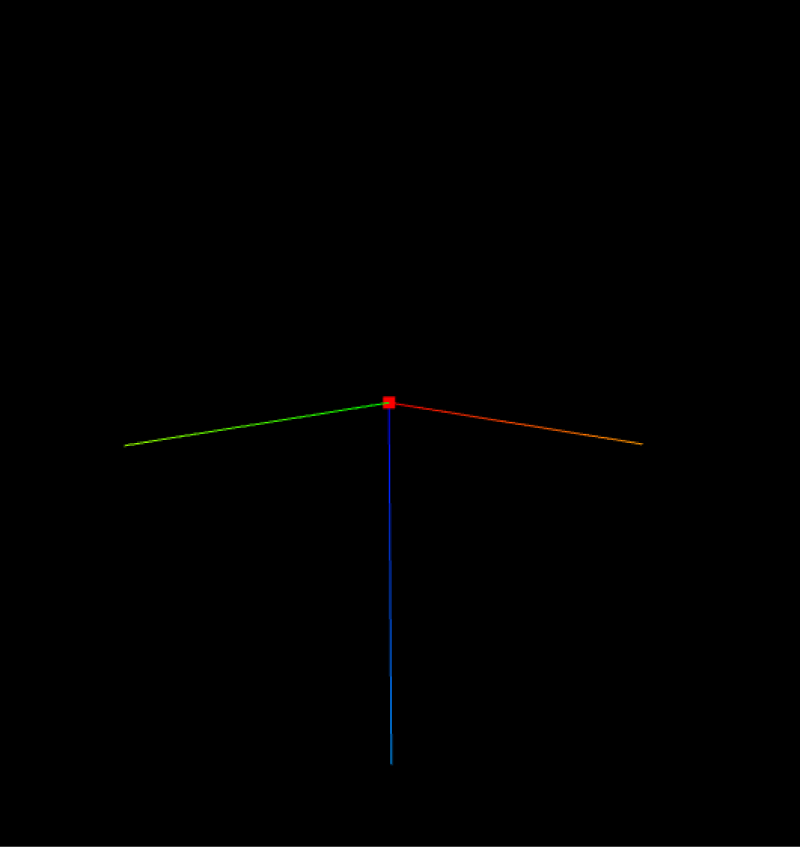
3D 좌표계 시점 전환: X/-X/Y/-Y/Z/-Z를 클릭합니다.
포인트 클라우드 편집
포인트 클라우드 잘라내기
다음 단계를 실행하여 포인트 클라우드를 잘라냅니다:
-
도구 모음에 있는
 를 클릭합니다.
를 클릭합니다. -
포인트 클라우드 선택
3D 편집 영역에서 잘라내거나 보존할 영역에 대해 왼쪽 버튼으로 프레임을 선택하고, 오른쪽 버튼을 클릭하여 프레임 선택을 완료합니다. 또한 마우스를 앵커 포인트로 이동하여 마우스 왼쪽 버튼을 길게 누른 채 임의 방향으로 드래그하여 선택 프레임을 조정할 수 있습니다.
-
편집 완료
-
프레임 선택된 부분을 잘라내려면 외부 보존을 클릭한 후 완료를 클릭합니다.
-
프레임 선택된 부분 외의 영역을 잘라내려면 내부 보존을 클릭한 후 완료를 클릭합니다.
-
또한 다시 프레임 선택이 필요한 경우 취소를 클릭할 수 있습니다.
포인트 클라우드 잘라내기 후의 효과에 만족하지 않는 경우 포인트 클라우드 작업 되돌리기를 할 수 있습니다.
포인트 클라우드 다운샘플링
다음 단계를 실행하여 포인트 클라우드 다운샘플링을 수행합니다:
-
도구 모음에 있는
 를 클릭합니다.
를 클릭합니다. -
팝업 창에서 샘플링 방법을 선택하고 샘플링 간격을 설정한 후 확인을 클릭합니다.
샘플링 방법
설명
균등 다운샘플링
고정 스텝으로 포인트 클라우드의 점을 선택하는 간단한 방법이지만 중요한 특징을 놓칠 수 있습니다.
복셀 다운샘플링
포인트 클라우드를 복셀 그리드로 나누어 각 복셀 내에서 하나의 대표점을 보존하여 점 수를 줄이지만 세부 사항을 잃을 수 있습니다.
포인트 클라우드 다운샘플링 후의 효과에 만족하지 않는 경우 포인트 클라우드 작업 되돌리기를 할 수 있습니다.
엣지 추출
엣지 매칭을 사용해야 하는 시나리오의 경우 다음 단계를 실행하여 포인트 클라우드를 엣지 추출합니다:
-
도구 모음에 있는
 를 클릭합니다.
를 클릭합니다. -
팝업 창에서 다음 매개변수를 설정한 후 확인을 클릭합니다.
매개변수
설명
엣지 각도 임계값
엣지 각도 임계값은 엣지 감지의 민감도를 결정합니다. 작은 임계값은 더 많은 엣지 점을 감지하지만 일부 노이즈를 포함할 수 있으며, 큰 임계값은 일부 실제 엣지 점을 놓칠 수 있습니다.
근접 검색 수
근접 검색 수는 엣지 추출 효과를 결정합니다.
엣지 추출 후의 포인트 클라우드 효과에 만족하지 않는 경우 포인트 클라우드 작업 되돌리기를 할 수 있습니다.
법선 벡터 생성
-
도구 모음에 있는
 를 클릭합니다.
를 클릭합니다. -
팝업 창에서 관련 매개변수를 설정합니다:
방법
설명
시점
3D 공간의 장면을 어느 위치에서 볼 것인지를 지정합니다.
근접 검색 수
근접 검색 수는 법선 벡터 생성의 정확도에 영향을 줍니다.
-
확인을 클릭합니다
법선 벡터 생성 후의 포인트 클라우드 효과에 만족하지 않는 경우 포인트 클라우드 작업 되돌리기를 할 수 있습니다.
중심 정렬
다음 단계를 실행하여 포인트 클라우드 바운딩 박스의 중심을 포인트 클라우드 원점으로 설정합니다:
-
도구 모음에 있는
 를 클릭합니다.
를 클릭합니다. -
확인을 클릭합니다.
중심 정렬 후의 포인트 클라우드 효과에 만족하지 않는 경우 포인트 클라우드 작업 되돌리기를 할 수 있습니다.
모델 좌표계 변환
다음 단계를 실행하여 모델 좌표계 변환을 수행합니다:
-
도구 모음에 있는
 를 클릭합니다.
를 클릭합니다. -
팝업 창에서 변환할 모델을 선택합니다: 포인트 클라우드 모델, 충돌 감지 모델.
-
해당 모델 매개변수를 조정하거나 Shift를 누른 채 마우스 왼쪽 버튼으로 컨트롤러를 드래그하여 이동한 후 확인을 클릭합니다.
마우스 왼쪽 버튼을 길게 누르면 팝업 창 위치를 드래그할 수 있습니다.
모델 좌표계 변환 후의 포인트 클라우드 효과에 만족하지 않는 경우 포인트 클라우드 작업 되돌리기를 할 수 있습니다.
모델 좌표계 원점 설정
다음 단계를 실행하여 설정합니다:
-
도구 모음에 있는
 를 클릭합니다.
를 클릭합니다. -
안내에 따라 포인트 클라우드의 임의 점을 선택하여 모델 좌표계 원점 설정합니다
-
확인을 클릭하여 공간 원점에 정렬합니다.
마우스 왼쪽 버튼을 길게 누르면 팝업 창 위치를 드래그할 수 있습니다.
모델 좌표계 원점 설정의 포인트 클라우드 효과에 만족하지 않는 경우 포인트 클라우드 작업 되돌리기를 할 수 있습니다.
픽 포인트 편집
픽 포인트 추가
다음 단계를 실행하여 직접 픽 포인트를 추가하고 픽 포인트 포즈를 조정합니다:
-
 를 클릭하면 픽 포인트가 기본적으로 포인트 클라우드 바운딩 박스 중심에 위치하며 픽 포인트 컨트롤러가 표시됩니다.
를 클릭하면 픽 포인트가 기본적으로 포인트 클라우드 바운딩 박스 중심에 위치하며 픽 포인트 컨트롤러가 표시됩니다. -
다음 두 방법을 결합하여 픽 포인트 포즈를 조정합니다:
-
대략적인 조정: 왼쪽 목록의 특정 픽 포인트 이름을 클릭하고 키보드 Shift를 누른 채 마우스 왼쪽 버튼으로 컨트롤러를 드래그하여 이동합니다.
-
정밀 조정: 픽 포인트 편집 창에서 각 포즈 매개변수를 조정합니다.
-
픽 포인트 미러링
작업물 및 도구의 특성에 따라 특정 규칙과 결합하여 픽 포인트를 미러링하면 동일한 작업물에 여러 픽 포인트를 추가할 수 있습니다.
작업 설명
픽 포인트 목록에서 미러링할 픽 포인트를 클릭한 후 도구 모음의 ![]() 를 클릭하여 미러링 픽 포인트 설정 창을 열고 해당 창에서 미러링 설정을 완료합니다. 설정 과정은 다음과 같습니다:
를 클릭하여 미러링 픽 포인트 설정 창을 열고 해당 창에서 미러링 설정을 완료합니다. 설정 과정은 다음과 같습니다:
-
미러링 활성화
미러링 활성화 여부를 체크합니다.
-
축 벡터 설정
축 벡터는 미러링 원점의 3D 좌표축 중 어느 축을 기준으로 미러링할 것인지를 의미합니다.
-
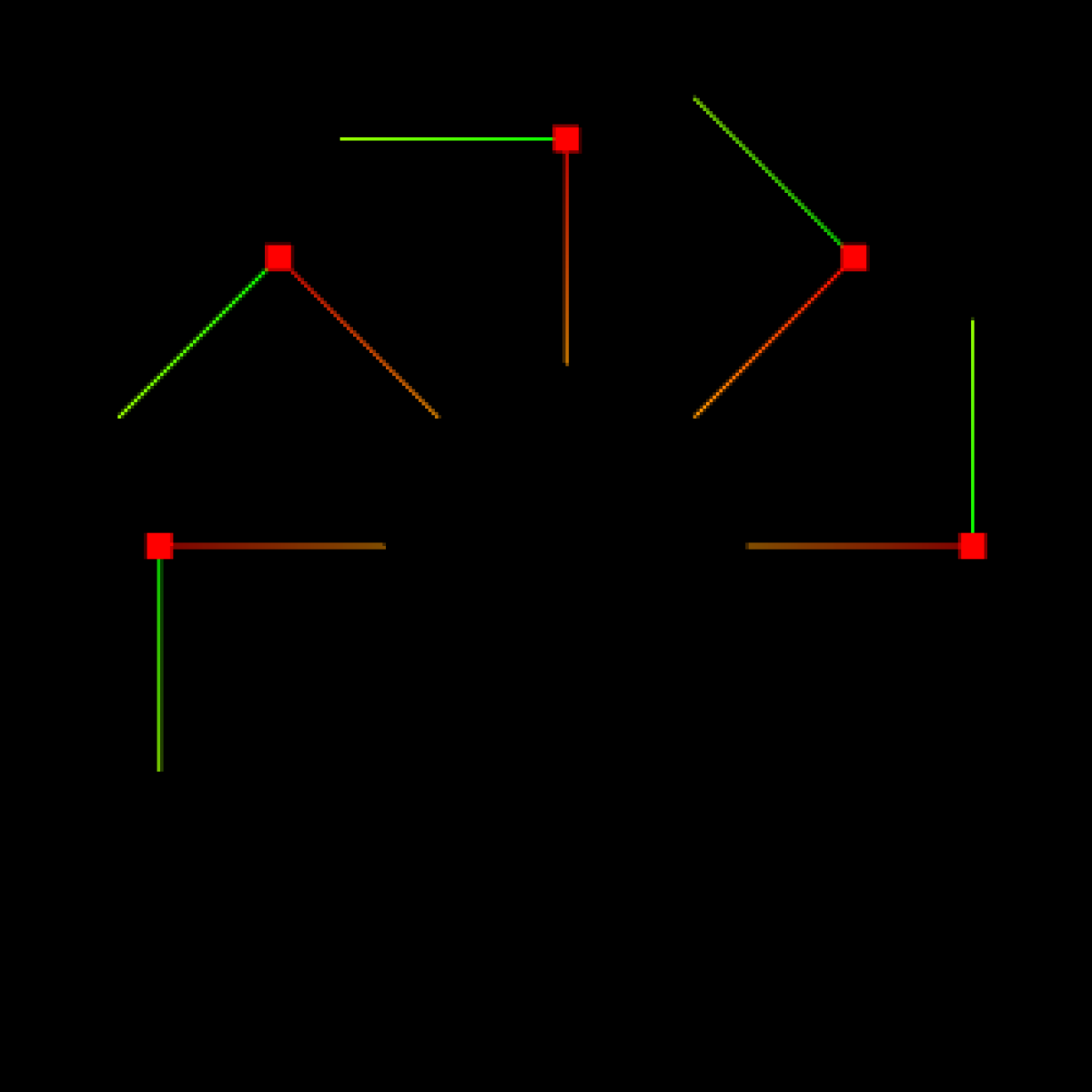
픽 포인트 X/Y/Z축
픽 포인트
축 벡터가 X축 미러링
축 벡터가 Y축 미러링
축 벡터가 Z축 미러링
-
사용자 정의: X축, Y축, Z축 벡터를 설정하여 축을 정의하고 해당 축을 기준으로 미러링합니다
-
-
축점 좌표 설정
축점 좌표는 어느 원점을 기준으로 미러링할 것인지를 의미합니다.
-
픽 포인트 자체 좌표계: 픽 포인트 자체 원점을 기준으로 미러링합니다.
-
사용자 정의: X축, Y축, Z축 매개변수 값을 설정하여 원점을 정의하고 해당 원점을 기준으로 미러링합니다.
-
-
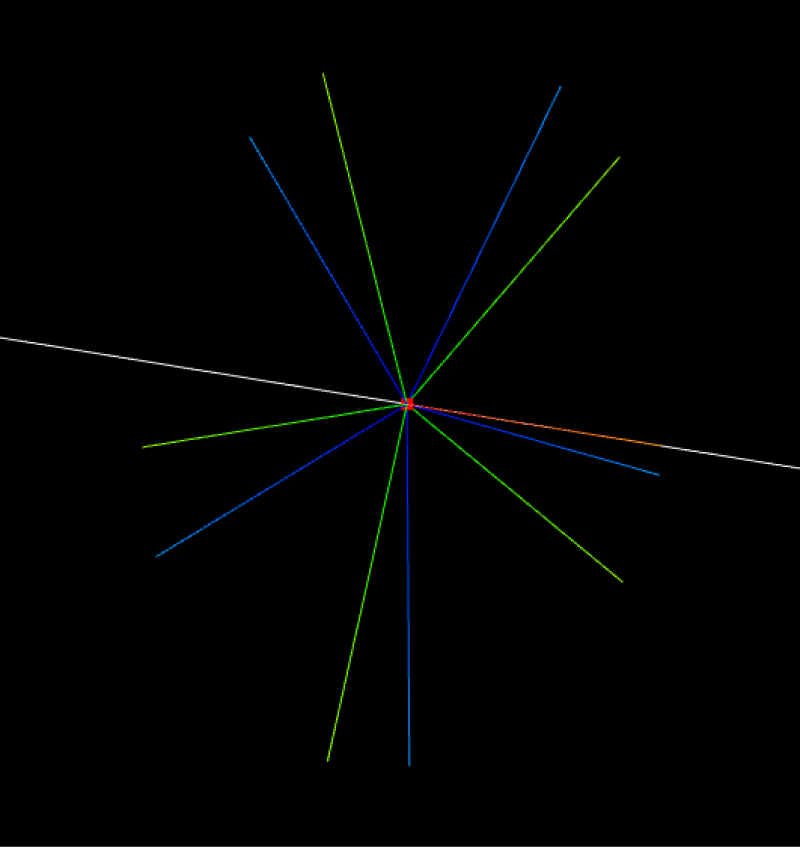
미러링 점 수 설정
미러링 점 수는 최종 픽 포인트 수를 의미합니다.
-
미러링 각도 설정
미러링 각도는 미러링 점을 생성하는 범위를 설정하는 데 사용됩니다. 아래 그림은 0°-180° 범위를 나타냅니다.