机器人奇异点
简介
在机器人运动学中,奇异点是指机器人在某些特定空间位置或姿态下,逆运动学出现无解、多解或敏感性极高的情况。此时机器人末端执行器(TCP)的位置和姿态无法唯一、稳定地映射到各关节的转角,导致控制精度下降甚至失控。
大部分6轴关节型机器人,由于机械限位或软限位的限制,在其运动空间中会出现逆运动学无解的情况,也就是基于坐标的规划运动无法明确的逆向转化为机器人各个关节轴的旋转角度。在机器人工作空间中这些逆运动学无解的点就被称为"奇异点"。机器人奇异点大致可以分为以下三种类型。
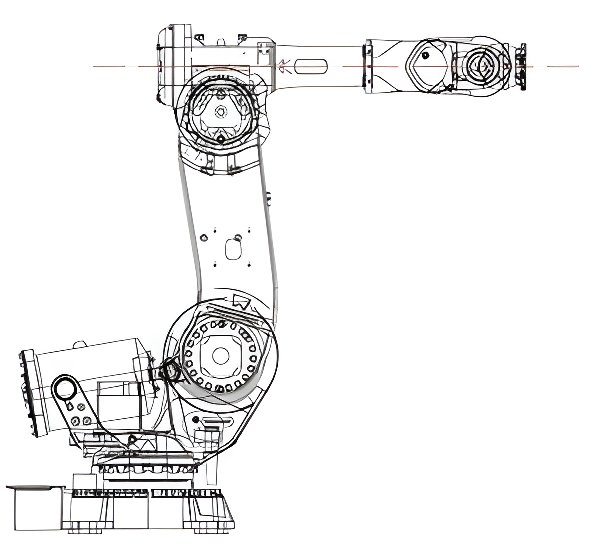
肩部奇异点
肩部奇异点是在机器人手腕的中心与J1轴关节在同一条直线上时发生。当机器人"肩部"——即第1关节轴(J1)与手腕中心连线共线时,机器人结构在水平方向上的自由度丧失。此时,J1和第4关节轴(J4)会出现耦合,导致两者需要"瞬间"完成大幅旋转以维持末端姿态,会导致关节轴1和4试图瞬间旋转180度。这种情况类似于人的肩膀与前臂完全伸直在一条线上时,手臂的某些旋转动作变得非常困难。
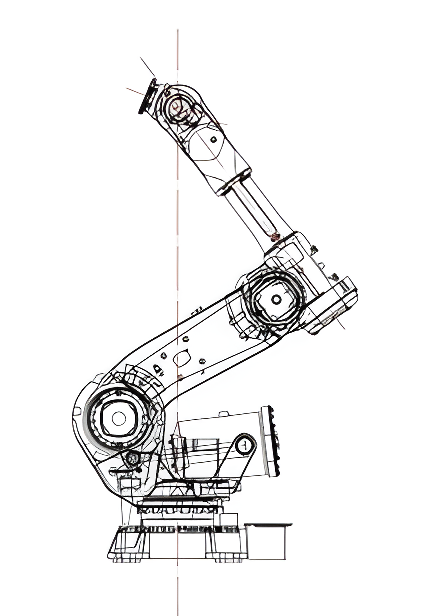
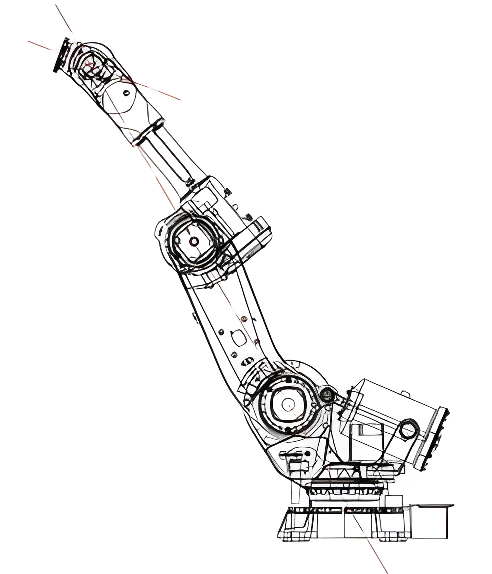
肘部奇异点
当机器人手腕的中心与关节轴2和3处于同一平面时,会产生肘部奇异点。当机器人"肘部"——即第2关节轴(J2)与第3关节轴(J3)及手腕中心点共面且完全伸直时,机器人类似于"手臂伸直到极限",导致肘部锁定在某个空间位置。此时,肘部的旋转自由度消失,导致末端运动的某些方向变得不可控,逆运动学解失去唯一性。这种情况类似人手臂完全伸直时,肘部无法再弯曲,部分动作受限。
奇异点的风险与影响
机器人在奇异点附近运动时,会出现以下几种风险情况:
-
运动异常:在奇异点附近,关节运动会出现剧烈变化,导致机器人产生"抽搐"或"非人类化"动作,影响作业安全与精度。
-
轨迹偏离:TCP的实际运动轨迹会偏离预设路径,影响焊接、搬运等高精度任务的执行质量。
-
控制失效:严重时,关节速度可能趋于无穷,造成伺服系统报警、关节损坏甚至安全事故。
-
逆运动学无解/多解:导致路径规划失败或执行异常。